(Л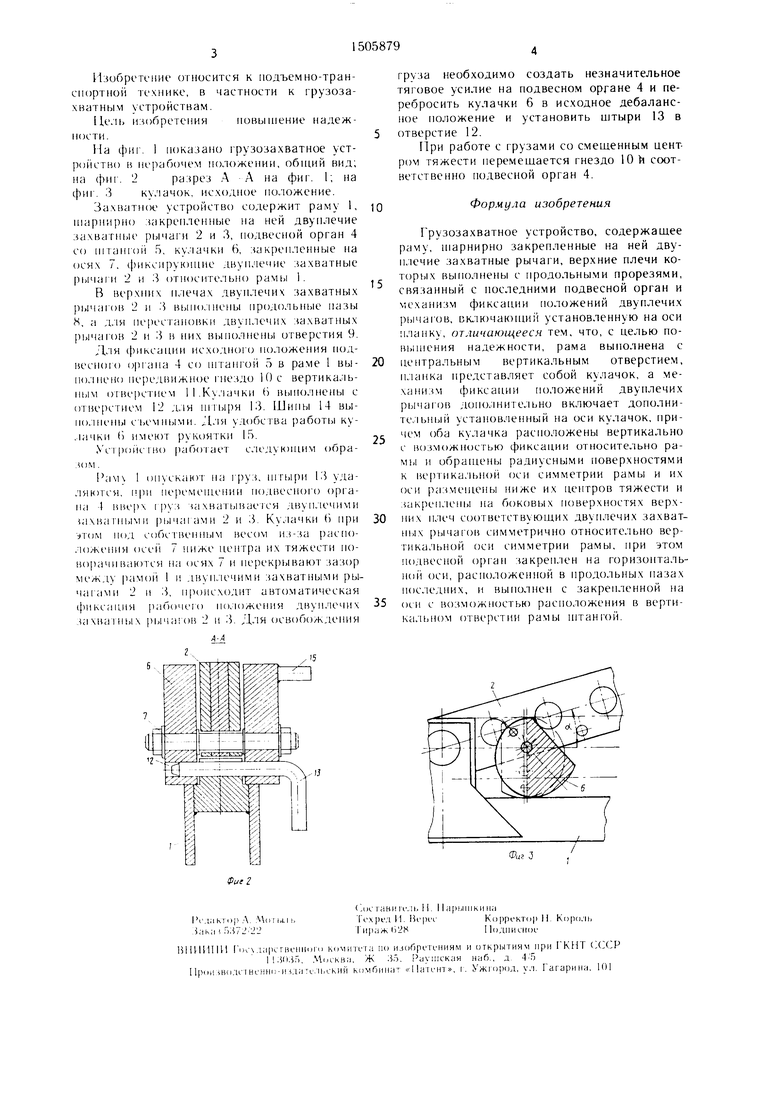
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление к чесальным машинам для оста нова при обрыве или колебании толщины выпускаемой ленты | 1951 |
|
SU97803A1 |
| Конический замковый захват | 1986 |
|
SU1505878A1 |
| Устройство для улавливания грузонесущего органа конвейера | 1983 |
|
SU1121204A1 |
| Грузозахватное устройство | 1984 |
|
SU1237604A1 |
| Самоотцепляющееся захватное устройство | 1986 |
|
SU1379226A1 |
| Грузозахватное устройство для вертикального расположенных грузов | 1983 |
|
SU1184791A1 |
| Устройство для закрывания крышек люков полувагона | 1985 |
|
SU1273284A1 |
| Грузозахватное устройство | 1989 |
|
SU1726352A1 |
| Раздатчик-измельчитель рулонных тюков | 1987 |
|
SU1531933A1 |
| Захват для кабин | 1984 |
|
SU1221176A1 |
Изобретение относится к подъемно-транспортному оборудованию , в частности, к грузозахватным устройствам. Цель изобретения - повышение надежности. Грузозахватное устройство содержит раму 1, двуплечие захватные рычаги 2 и 3 и кулачки 6, закрепленные на осях 7. При захвате груза за счет размещения осей 7 ниже центра тяжести кулачков 6 они перекрывают зазор между рамой 1 и двуплечими захватными рычагами 2,3, обеспечивая тем самым фиксацию рабочего положения последних. 3 ил.
СП
о ел
00
Изобретение относится к подъемно-транспортной технике, в частности к грузозахватным устройствам.
Це-чь изобретения новьпнение надежности.
На фиг. 1 показано грузозахватное устройство в нерабочем положении, обнщй вид; на (()иг. 2разрез А А на фиг. 1; на
фиг. 3 кулачок, ис.ходное положение.
За.хватное устройство содержит раму 1, Н1арнирно закрепленные па ней двуплечие за.хватные рычаги 2 и 3, подвесной орган 4 со 1нтанго11 5, ку.пачки 6, закренленные на ося.х 7, фикс11рук)П1ие двуплечие захватные рычаги 2 и 3 относитель но рамы 1.
В вер.хпих плечах двуилечих захватных рычаго 2 и .3 выпо.шепы продольные пазы М, а д,1я перестановки двуплечих за.хватпых рычагов 2 и 3 в них Н1 |полнепы отверстия 9.
Д. 1Я (()иксапии исходногс положения подвесного opiaHa 4 со пггангой 5 в раме 1 вы- полнепо передвижное гнездо Юс вертикаль- Н1)1м огверстпем 11.Кулачки ( вьнюлнены с ()тве)стие.1 12 для п11Т)1)я 13. Шипь 14 вы- по.лпепы сьемными. Для удобства работы кулички f) имеют рукоятки 15.
Х стройс-1И() |)абогает с.чедующим образом .
1 опускают па груз, нггыри 13 удаляются, п|)11 пе)еме1иепии ПОДЕКЧЧЮГО органа 4 liiicpx I руз захватьп аегся двуп.1ечими iaxHaiHi)iMM рычагами 2 и 3. Кулачки tJ при :1том под собс венным весом из-за распо- , 1ожепия oceii 7 ниже пентра их тяжести по- ворачп 1 аются на осях 7 и нерекрывают зазор между |)амо11 1 и двун.лечими захватными рычагами 2 п 3, п 1оисх()дит автоматическая 1()иксация рабочего п(), 1ожен11Я двун, 1ечих .(ахватных рычагов 2 и 3. Д.чя (1свобождения
4:4 2 6.
5
Q
0
0 5
5
груза необходимо создать незначительное тяговое усилие на нодвесном органе 4 и перебросить кулачки 6 в исходное дебаланс- пое положение и установить 13 в отверстие 12.
Г1ри работе с грузами со смещенным центром тяжести неремещается гнездо lOh соот- вегственно подвесной орган 4.
Формула изобретения
Грузозахватное устройство, содержащее раму, Н1арнирно закренленные на ней дву- нлечие захватные рычаги, верхние нлечи ко- торьгх вьпюлнены с продольными прорезями, связанный с носледними подвесной орган и механизм фиксации положений двуплечих р|,1чагов, включаюншй установленную на оси планку, отличающееся тем, что, с целью повышения надежности, рама выполнена с центральным вертикальным отверстием, нланка представляет собой кулачок, а механизм фиксации юложений двуплечих рычаг ов допо;1нительно включает дополни- те;1ЬН1)1Й установленный па оси кулачок, причем оба кулачка расположены вертикально с возможностью фиксации относительно рамы и обрангеньэ радиусными поверхностями к 15е)тикальной оси симметрии рамы и их оси размеп1е11ы ниже их центров тяжести и закреп.чепы на боковых поверхностях верхних нлеч соответствующих двуплечих захват- пглх рычагов симметрично относительно вертикальной оси симметрии рамы, при этом подвесной оргаи закреплен на горизоиталь- ной оси, расноложенной в нродольных пазах последних, и выполнен с закрепленной па оси с возможностью расположения в вертикальном отверстии рамы и1тан1 ой.
| Автоматический захват для штучных грузов | 1976 |
|
SU650947A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
