реверсивного перемещения грузонесущей платформы (ГНП). Устр-во включает раму 2 с направляющими в виде роликов 3 для ГНП в виде поддона (П) 4. Привод перемепдения ГНП имеет две параллельно расположенные на раме 2 вдоль направления транспортирования вертикально замкнутые приводные цепи 5. Цепи 5 охватывают две пары звездочек 6 и имеют два установленных против друг друга ведущих пальца (ВП) 7 с возможностью размещения в основных и дополнительных вертикальных пазах 8 и 9, расположенных у торцов П 4. На приводных цепях одними концами шарнирно закреплены две планки 10 с.закрепленными на них дополнительными ВП П. Другие концы планок 10 выполнены с продольными пазами и имеют возможность поступательного перемещения относительно расположенных в них упорных
элементов. При движении цепи 5 ВП 7 входят в пазы 8 и двигают П 4 в направлении роликов 17 смены П 4. При дальнейщем движении цепи 5 ВП 11, установленные на планках 10, воздействуют на торцовую поверхностЪ 12 П 4 и двигают его на ролики 17. После установки П 4 на ролики 17 цепь 5 движется в обратную сторону. При этом ВП 7 и 11 взаимодействуют с П 4 в том же порядке. 5 ил.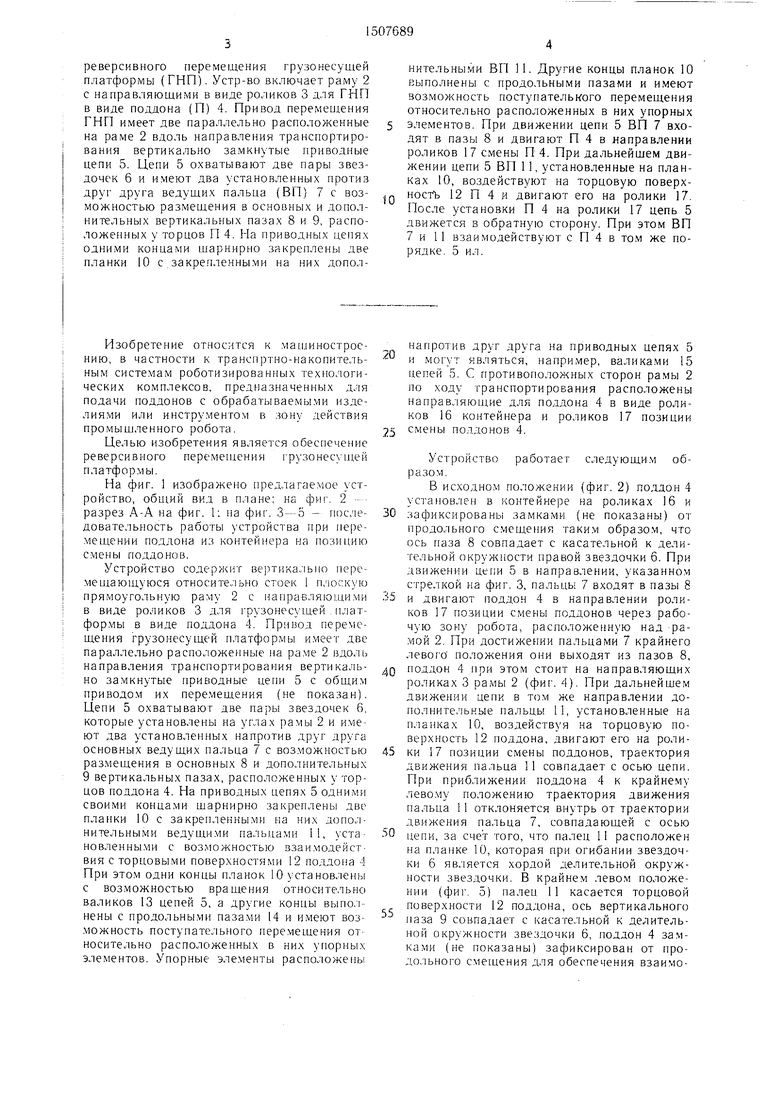
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный конвейер для штучных грузов | 1988 |
|
SU1602814A1 |
| Вертикальный цепной конвейер для транспортирования штучных грузов | 1972 |
|
SU466157A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
| Вертикальный конвейер для штучных грузов | 1985 |
|
SU1244046A1 |
| СПОСОБ ПАРКОВКИ АВТОМОБИЛЕЙ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ, МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА С ХРАНЕНИЕМ АВТОМОБИЛЕЙ НА ПОДДОНАХ, ПРИЁМНО-ПОВОРОТНЫЙ МЕХАНИЗМ ДЛЯ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ С ПОДЪЁМНОЙ КЛЕТЬЮ, КЛЕТЬ ДЛЯ ТРАНСПОРТИРОВКИ ПОДДОНА ВНУТРИ МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКИ, МЕХАНИЗМ СИНХРОННОГО ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩИХ КАРЕТОК КЛЕТИ, АВТОМОБИЛЬНЫЙ ПОДДОН | 2002 |
|
RU2208113C1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| Горизонтально-замкнутый конвейер | 1990 |
|
SU1757970A1 |
| Распределительный тележечный конвейер | 1990 |
|
SU1770230A1 |
| Скороморозильный аппарат для упакованных пищевых продуктов на поддонах | 1985 |
|
SU1330427A1 |
| Вертикальный цепной конвейер для транспортирования штучных грузов | 1982 |
|
SU1071537A1 |
Изобретение относится к машиностроению , в частности, к транспортно-накопительным системам роботизированных технологических комплексов. Последние предназначены для подачи поддонов с обрабатываемыми изделиями или инструментом в зону действия промышленного робота. Цель - обеспечение реверсивного перемещения грузонесущей платформы (ГНП). Устройство включает раму 2 с направляющими в виде роликов 3 для ГНП в виде поддона (П) 4. Привод перемещения ГНП имеет две параллельно расположенные на раме 2 вдоль направления транспортирования вертикально-замкнутые приводные цепи 5. Цепи 5 охватывают две пары звездочек 6 и имеет два установленных против друг друга ведущих пальца (ВП) 7 с возможностью размещения в основных и дополнительных вертикальных пазах 8, 9, расположенных у торцов П 4. На приводных цепях одними концами шарнирно закреплены две планки 10 с закрепленными на них дополнительными ВП 11. Другие концы планок 10 выполнены с продольными пазами и имеют возможность поступательного перемещения относительно расположенных в них упорных элементов. При движении цепи 5 ВП 7 входят в пазы 8 и двигают П 4 в направлении роликов 17 смены П 4. При дальнейшем движении цепи 5 ВП 11, установленные на планках 10, воздействуют на торцовую поверхность 12 П 4 и двигают его на ролики 17. После установки П 4 на ролики 17 цепь 5 движется в обратную сторону. При этом ВП 7 и 11 взаимодействуют с П 4 в том же порядке. 5 ил.
Изобретение относится к ма иинострос- нию, в частности к транспртно-накопитель- ным системам роботизированных технологических комплексов, предназначенных для подачи поддонов с обрабатываемы.ми изделиями или инструменто.м в зону действия промыщленного робота.
Целью изобретения является обеспечение реверсивного перемепдения грузонесущей платформы.
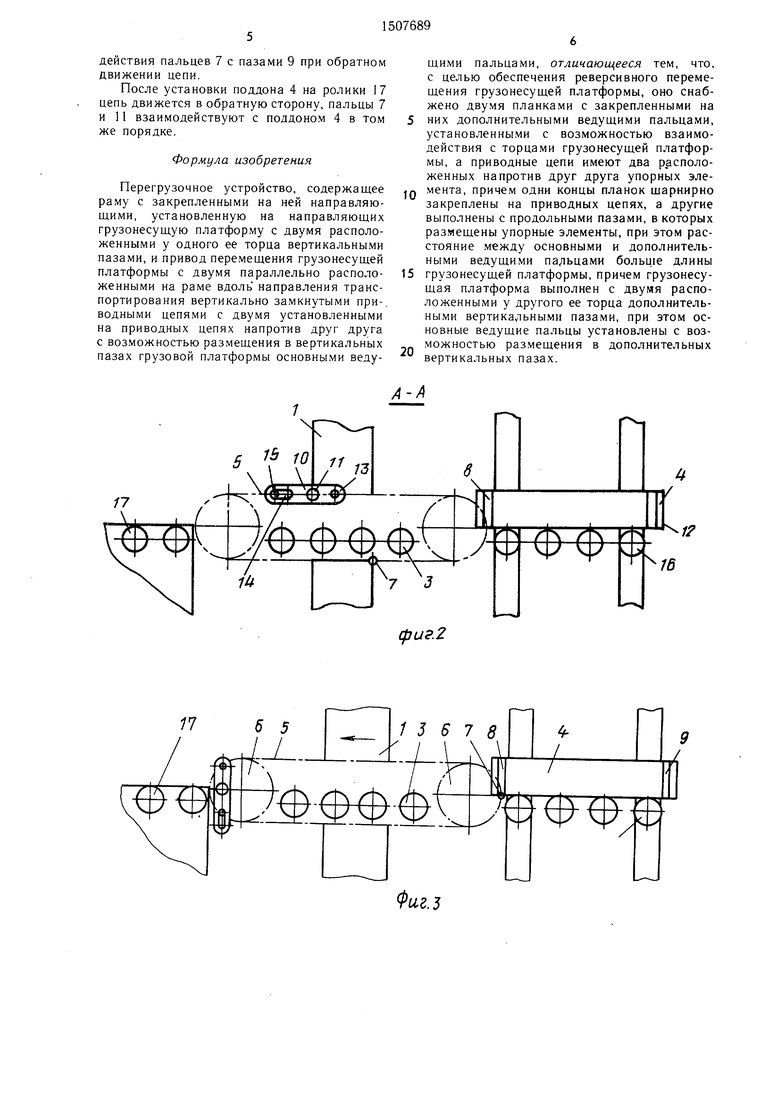
На фиг. 1 изображено предлагаемое устройство, общий вид в плане; на фиг, 2 - разрез А-А на фиг. 1: на фиг. 3-5 - последовательность работы устройства при перемещении поддона из контейнера на позицию смены поддонов.
Устройство содержит вертикально перемещающуюся относительно стоек 1 плоскую прямоугольную раму 2 с направляющи.ми в виде роликов 3 для грузонесущей . платформы в виде поддона 4. Привод перемещения грузонесущей платформы имеет две параллельно расположенные на ра.ме 2 направления транспортирования вертикально замкнутые приводные цепи 5 с общим приводом их перемещения (не показан). Цепи 5 охватывают две пары звездочек 6, которые установлены на углах рамы 2 и имеют два установленных напротив друг друга основных ведущих пальца 7 с возможностью размещения в основных 8 и дополнительных 9 вертикальных пазах, расположенных у торцов поддона 4. На приводных цепях 5 одними своими концами щарнирно закреплены две планки 10 с закрепленным. на них нительными ведущими пальцами 11, уста новленными с возможностью взаи.модейст- вия с торцовыми поверхностями 12 поддона 4 При этом одни концы планок 10 установлены с возможностью вращения относительно валиков 13 цепей 5, а другие концы выпо.1- нены с продольными пазами 14 и имеют возможность поступательного перемещения от носительно расположенных в них упорных элементов. Упорные эле.менты расположены
напротив друг друга на приводных цепях 5 и мог ут являться, например, валика.ми 15 цепей 5. С противополол ных сторон рамы 2 по ходу транспортирования расположены направляющие для поддона 4 в виде роликов 16 контейнера и роликов 17 позиции смены поддонов 4.
Устройство работает следующим образом.
В исходном положении (фиг. 2) поддон 4 установлен в контейнере на роликах 16 и
зафиксированы замками (не показаны) от продольного смещения таки.м образом, что ось паза 8 совпадает с касательной к делительной окружности правой звездочки 6. При движении цепи 5 в направлении, указанном стрелкой на фиг. 3, пальцы 7 входят в пазы 8
и двигают поддон 4 в направлении роликов 17 позиции смены поддонов через рабочую зону робота, расположенную над рамой 2. При достижении пальцами 7 крайнего левого положения они выходят из пазов 8,
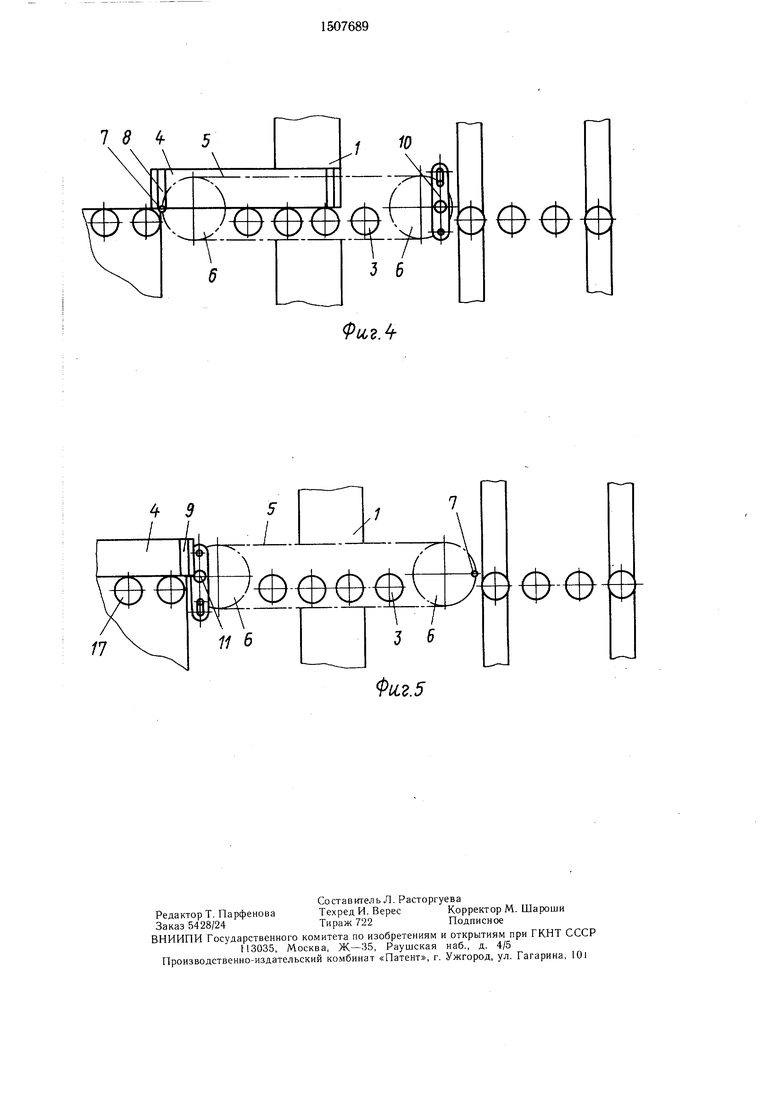
поддон 4 при этом стоит на направляющих роликах 3 рамы 2 (фиг. 4). При дальнейшем движении цепи в том же направлении дополнительные пальцы 11, установленные на планках 10, воздействуя на торцовую поверхность 12 поддона, двигают его на ролики 17 позиции смены поддонов, траектория движения пальца 11 совпадает с осью цепи. При приближении поддона 4 к крайнему лево.му положению траектория движения пальца 11 отклоняется внутрь от траектории движения пальца 7, совпадающей с осью
цепи, за счет того, что палец II расположен на планке 10, которая при огибании звездочки 6 является хордой делительной окружности звездочки. В крайнем левом положении (фиг. 5) палец 11 касается торцовой поверхности 12 поддона, ось вертикального паза 9 совпадает с касательной к делительной окружности звездочки 6, поддон 4 замками (не показаны) зафиксирован от продольного смещения для обеспечения взаимодействия пальцев 7 с пазами 9 при обратном движении цепи.
После установки поддона 4 на ролики 17 цепь движется в обратную сторону, пальцы 7 и 11 взаимодействуют с поддоном 4 в том же порядке.
Формула изобретения
Перегрузочное устройство, содержащее раму с закрепленными на ней направляющими, установленную на направляющих грузонесущую платформу с двумя расположенными у одного ее торца вертикальными пазами, и привод перемещения грузонесущей платформы с двумя параллельно расположенными на раме вдоль направления транспортирования вертикально замкнутыми при-, водными цепями с двумя установленными на приводных цепях напротив друг друга с возможностью размещения в вертикальных пазах грузовой платформы основными ведущими пальцами, отличающееся тем, что. с целью обеспечения реверсивного перемещения грузонесущей платформы, оно снабжено двумя планками с закрепленными на
5 них дополнительными ведущими пальцами, установленными с возможностью взаимодействия с торцами грузонесущей платформы, а приводные цепи имеют два расположенных напротив друг друга упорных элеQ мента, причем одни концы планок шарнирно закреплены на приводных цепях, а другие выполнены с продольными пазами, в которых размещены упорные элементы, при этом расстояние между основными и дополнительными ведущими пальцами болы11е длины
5 грузонесущей платформы, причем грузонесу- щая платформа выполнен с двумя расположенными у другого ее торца дополнительными вертикальными пазами, при этом основные ведущие пальцы установлены с возможностью размещения в дополнительных
0
вертикальных пазах.
Х
.2
Фиг.з
18 5
МФФ
и,.
/ 0
| Патент ФРГ № 3019017, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
