Изобретение относится к металлургии, а именно к непрерывной разливке металлов, конкретнее к автоматизации машин непрерывного литья заготовок.
Цель изобретения - расширение функциональных возможностей устройства.
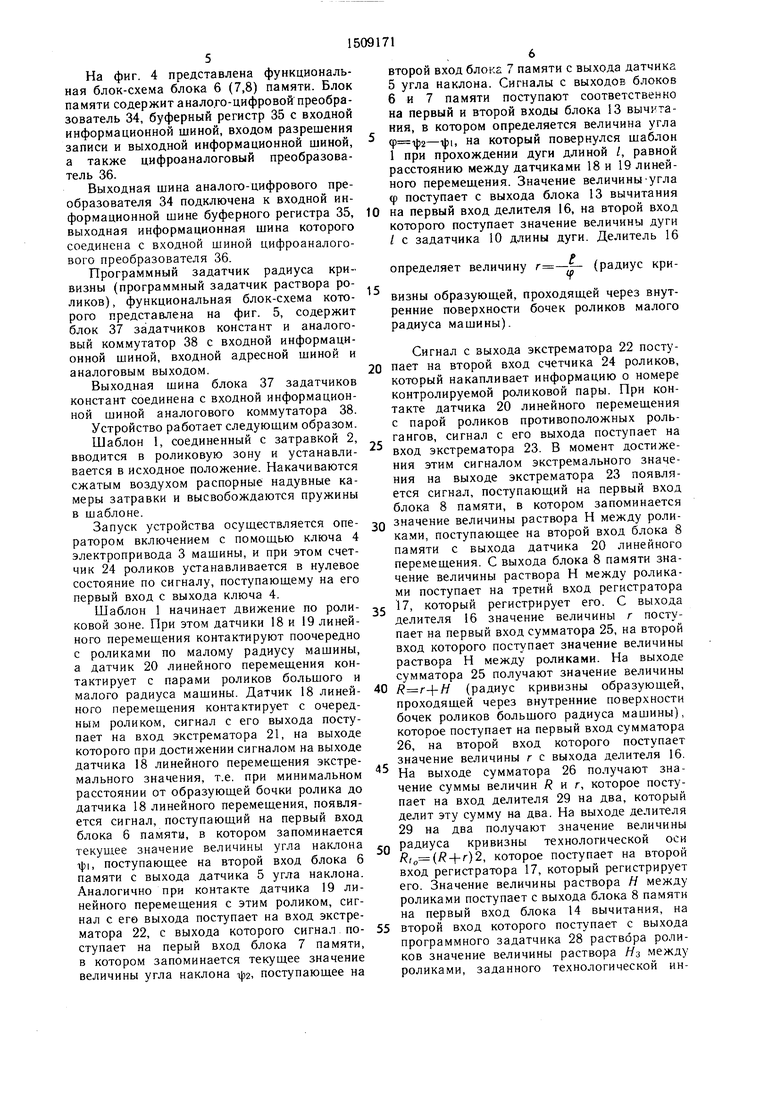
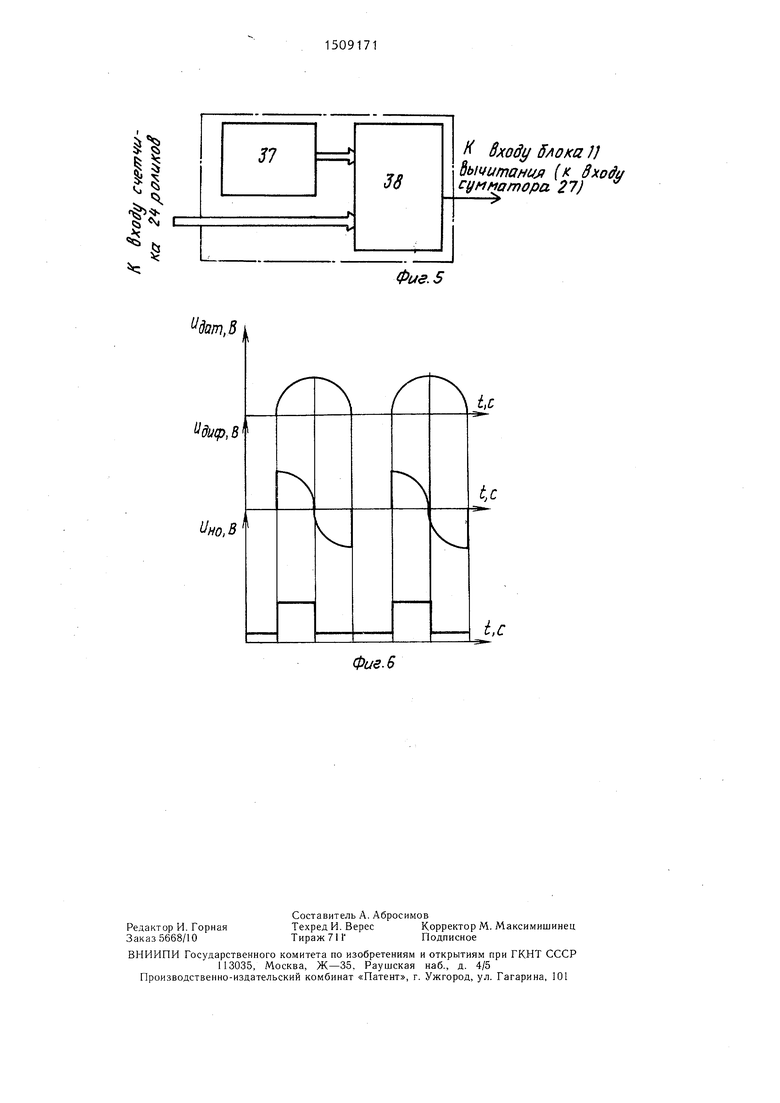
На фиг. 1 изображена функциональная блок-схема предлагаемого устройства; на фиг. 2 - геометрическая схема определения точности настройки роликовой проводки машины; на фиг. 3 - функциональная блок-схема экстрематора; на фиг. 4 - функциональная блок-схема блока памяти; на фиг. 5 - функциональная блок-схема программного задатчика радиуса кривизны и программного задатчика раствора роликов;, на фиг. 6 - графики, поясняющие работу экстрематора.
Устройство контроля настройки технологического оборудования машины непрерывного литья заготовок состоит из разъемного металлического шаблона 1 прямоугольного сечения, снабженного пружинами для поджатия его стенок к бочкам роликов и шарнирно соединенного с затравкой 2, перемещаемой по роликовой зоне с помощью электропривода 3 роликовой зоны машины непрерывного литья заготовок, управляемого ключом 4. Во внутренней части шаблона 1 установлен датчик 5 угла наклона, который позволяет определить угол, образованный касательной к технологической оси машины и горизонтом для каждой роликовой пары. Кроме этого, устройство содержит блоки 6-8 памяти, программный задатчик 9 радиуса кривизны, задатчик 10
сд о
Сб
длины дуги, блоки 11 -15 вычитания, делитель 16 и регистратор 17.
Кроме этого, во внутренней части шаблона расположены датчики 18 и 19 линейного перемещения, установленные с той стороны шаблона 1, которая контактирует с роликами по малому радиусу машины, и позволяюш,ие определить расстояние от плоскости шаблона 1 до бочки ролика по малому радиусу машины, причем расстояние / между
гистратора 17. Выход блока 8 г амяти сое динен с первым входом блока 4 вычитания, выход которого соединен с четвертым входом регистратора 17. Выходная шина счетчика 24 роликов соединена с входом программного задатчика 28 раствора роликов, выход которого соединен с вторым входом блока 14 вычитания. Выход программного задатчика 28 раствора роликов соединен с входом делителя 30 на два,
датчиками 18 и 19 линейного перемеш.ения 10 выход которого соединен с первым входом не должно превышать величины (0,8-0,9)L,сумматора 27, выход которого соединен с
первым входом блока 15 вычитания, выход которого соединен с пятым входом регистратора 17. Выход блока 8 памяти соедигде L - минимальное расстояние между осями двух соседних роликов рольганга по малому радиусу машины. Этот коэффициент выбран для того, чтобы датчики .; нен с вторым входом сумматора 25. Выход линейного перемеш,ения в течение одного датчика 20 линейного перемещения соединен с вторым входом блока 8 памяти. Выход экстрематора 22 соединен с вторым входом счетчика 24 роликов. Выход делителя 30 на два соединен с вторым входом блока 11 вычи.роликовой проводки машины. Кроме этого, 20 танин. Выход программного задатчика 9 ради- во внутренней части шаблона 1 установлен уса кривизны соединен с вторым входом сумматора 27. Выход делителя 16 соединен с вторым входом блока 12 вычитания. Вызамера, относящегося к одной роликовой паре не контактировали с роликами смежных роликовых пар и, в то же время, чтобы обеспечить достаточную точность контроля
ход сумматора 25 соединен с вторым вховходом сумматора 26. Выход ключа 4 соединен с входом электропривода 3 роликовой зоны.
На фиг. 2 представлена геометричесдатчик 20 линейного перемещения, позволяющий определить расстояние между роликами противолежащих рольгангов в направлении, перпендикулярном технологичес-дом блока 15 вычитания, кой оси машины (раствор роликов). Уст-Выход делителя 16 соединен с вторым ройство снабжено также экстрематорами 21-23, счетчиком 24 роликОв, сумматорами 25-27, программным задатчиком 28 раствора роликов и делителями 29 и 30 на два, причем выход ключа 4 соединен с первым 0 схема определения точности настройки входом счетчика 24 роликов, выходная шина роликовой проводки ма-шины. Сплошной ли- которого соединена с входом программного нией показано положение датчиков 5 и 18- задатчика 9 радиуса кривизны, выход 20 при контакте датчика 18 линейного пере- которого соединен с первым входом блока мещения с контролируемым роликом, а 11 вычитания, выход которого соединен с штрих-пунктирной - положение датчиков первым входом блока 12 вычитания, выход 35 19 и 20 при контакте датчика 19 с конт- которого соединен с первым входом регист- ролируемым роликом. Кроме того, на фиг. 2
приняты следующие обозначения: г - радиус кривизны образующей, проходящей через внутренние поверхности бочек роликов малого радиуса мащины, Н - раствор роликов, 1|)1 и ij)2 - углы между горизонтальной плоскостью шаблона, в котором установлен датчик 5 угла наклона, и горизонтальном соответственно в моменты контакта датчиков 18 и 19 линейного перемещения с конт- матора 26, выход которого соединен с вхо- ролируемым роликом, ф - угол, на который дом делителя 29 на. два, выход которогоповорачивается шаблон с установленным в
соединен с вторым входом регистратора 17. его внутренней части датчиком 4 угла накло- Выход датчика 19 линейного перемещения на за время перемещения вдоль техноло- соединен с входом экстрематора 22, выход гической оси машины на расстояние / между которого соединен с первым входом блока датчиками 18 и 19 линейного перемещения, 7 памяти, выход которого соединен с вторым 50 - радиус кривизны образующей, прохо- входом блока 13 вычитания. Выход задат- дящей через внутренние поверхности бочек
ратора 17. Выход датчика 18 линейного перемещения соединен с входом экстрема- тора 21, выход которого соединен с первым входом блока 6 памяти, выход которого соединен с первым входом блока 13 вычитания, выход которого соединен с первым входом делителя 16, выход которого соединен с первым входом сумматора 25, выход которого соединен с первым входом сум40
чина 10 длины дуги соединен с вторым входом делителя 16. Вторые входы блоков 6 и 7 памяти соединены с выходом датчика 5 угла наклона. Выход датчика 20
роликов большого радиуса машины.
На фиг. 3 представлена функциональная блок-схема экстрематора 21 (22, 23). Экстрематор содержит дифференциатор 31,
линейного перемещения соединен с входом55 задатчик 32 и нуль-орган 33. Выход диффеэкстрематора 23, выход которого соединенренциатора 31 соединен с первым входом
с первым входом блока 8 памяти, выходнуль-органа 33, второй вход которого соекоторого соединен с третьим входом ре-динен с выходом задатчика 32.
гистратора 17. Выход блока 8 г амяти сое динен с первым входом блока 4 вычитания, выход которого соединен с четвертым входом регистратора 17. Выходная шина счетчика 24 роликов соединена с входом программного задатчика 28 раствора роликов, выход которого соединен с вторым входом блока 14 вычитания. Выход программного задатчика 28 раствора роликов соединен с входом делителя 30 на два,
первым входом блока 15 вычитания, выход которого соединен с пятым входом регистратора 17. Выход блока 8 памяти соединен с вторым входом сумматора 25. Выход датчика 20 линейного перемещения соединен с вторым входом блока 8 памяти. Выход экстрематора 22 соединен с вторым входом счетчика 24 роликов. Выход делителя 30 на два соединен с вторым входом блока 11 вычи.ход сумматора 25 соединен с вторым входом блока 15 вычитания, Выход делителя 16 соединен с вторым схема определения точности настройки роликовой проводки ма-шины. Сплошной ли- нией показано положение датчиков 5 и 18- 20 при контакте датчика 18 линейного пере- мещения с контролируемым роликом, а штрих-пунктирной - положение датчиков 19 и 20 при контакте датчика 19 с конт- ролируемым роликом. Кроме того, на фиг. 2
входом сумматора 26. Выход ключа 4 соединен с входом электропривода 3 роликовой зоны.
На фиг. 2 представлена геометричесдом блока 15 вычитания, Выход делителя 16 соединен с вторым схема определения точности настройки роликовой проводки ма-шины. Сплошной ли- нией показано положение датчиков 5 и 18- 20 при контакте датчика 18 линейного пере- мещения с контролируемым роликом, а штрих-пунктирной - положение датчиков 19 и 20 при контакте датчика 19 с конт- ролируемым роликом. Кроме того, на фиг. 2
роликов большого радиуса машины.
На фиг. 3 представлена функциональная блок-схема экстрематора 21 (22, 23). Экстрематор содержит дифференциатор 31,
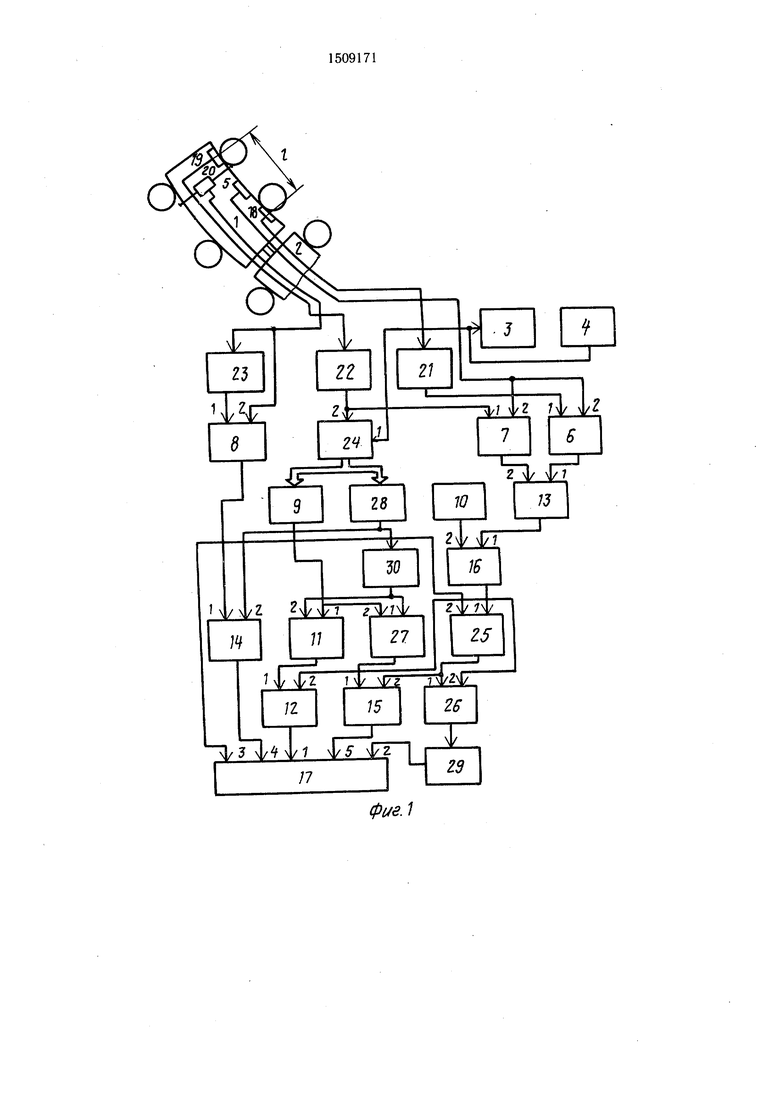
задатчик 32 и нуль-орган 33. Выход диффеНа фиг. 4 представлена функциональная блок-схема блока 6 (7,8) памяти. Блок памяти содержит аналого-цифровой преобразователь 34, буферный регистр 35 с входной информационной шиной, входом разрешения записи и выходной информационной шиной, а также цифроаналоговый преобразователь 36.
Выходная шина аналого-цифрового преобразователя 34 подключена к входной инвторой вход блока 7 памяти с выхода датчика
5угла наклона. Сигналы с выходов блоков
6и 7 памяти поступают соответственно на первый и второй входы блока 13 вычитания, в котором определяется величина угла
5 ,2-г|)1, на который повернулся шаблон 1 при прохождении дуги длиной /, равной расстоянию между датчиками 18 и 19 линейного перемещения. Значение величины-угла Ф поступает с выхода блока 13 вычитания
формационной шине буферного регистра 35, 10 на первый вход делителя 16, на второй вход выходная информационная шина которогокоторого поступает значение величины дуги
соединена с входной шиной цифроаналого-i с задатчика 10 длины дуги. Делитель 16
вого преобразователя 36.
Программный задатчик радиуса кривизны (программный задатчик раствора роликов), функциональная блок-схема которого представлена на фиг. 5, содержит блок 37 задатчиков констант и аналоговый коммутатор 38 с входной информационной шиной, входной адресной шиной и аналоговым выходом.
Выходная шина блока 37 задатчиков констант соединена с входной информационной шиной аналогового коммутатора 38.
Устройство работает следуюшим образом.
Шаблон 1, соединенный с затравкой 2, вводится в роликовую зону и устанавливается в исходное положение. Накачиваются сжатым воздухом распорные надувные камеры затравки и высвобождаются пружины в шаблоне.
15
определяет величину (радиус кривизны образующей, проходящей через внутренние поверхности бочек роликов малого радиуса машины).
Сигнал с выхода экстрематора 22 посту- 20 пает на второй вход счетчика 24 роликов, который накапливает информацию о номере контролируемой роликовой пары. При контакте датчика 20 линейного перемещения с парой роликов противоположных рольгангов, сигнал с его выхода поступает на вход экстрематора 23. В момент достижения этим сигналом экстремального значения на выходе экстрематора 23 появляется сигнал, поступающий на первый вход блока 8 памяти, в котором запоминается
25
Сигнал с выхода экстрематора 22 посту- 20 пает на второй вход счетчика 24 роликов, который накапливает информацию о номере контролируемой роликовой пары. При контакте датчика 20 линейного перемещения с парой роликов противоположных рольгангов, сигнал с его выхода поступает на вход экстрематора 23. В момент достижения этим сигналом экстремального значения на выходе экстрематора 23 появляется сигнал, поступающий на первый вход блока 8 памяти, в котором запоминается
Запуск устройства осуществляется one- о значение величины раствора Н между ролиратором включением с помощью ключа 4 электропривода 3 машины, и при этом счетчик 24 роликов устанавливается в нулевое состояние по сигналу, поступающему на его первый вход с выхода ключа 4.
Шаблон 1 начинает движение по роликовой зоне. При этом датчики 18 и 19 линейного перемещения контактируют поочередно с роликами по малому радиусу машины, а датчик 20 линейного перемещения контактирует с парами роликов большого и
35
ками, поступаюшее на второй вход блока 8 памяти с выхода датчика 20 линейного перемещения. С выхода блока 8 памяти значение величины раствора Н между роликами поступает на третий вход регистратора 17, который регистрирует его. С выхода делителя 16 значение величины г поступает на первый вход сумматора 25, на второй вход которого поступает значение величины раствора Н между роликами. На выходе сумматора 25 получают значение величины
малого радиуса машины. Датчик 18 линей- 40 (радиус кривизны образующей.
второй вход блока 7 памяти с выхода датчика
5угла наклона. Сигналы с выходов блоков
6и 7 памяти поступают соответственно на первый и второй входы блока 13 вычитания, в котором определяется величина угла
,2-г|)1, на который повернулся шаблон 1 при прохождении дуги длиной /, равной расстоянию между датчиками 18 и 19 линейного перемещения. Значение величины-угла Ф поступает с выхода блока 13 вычитания
на первый вход делителя 16, на второй вход которого поступает значение величины дуги
определяет величину (радиус кривизны образующей, проходящей через внутренние поверхности бочек роликов малого радиуса машины).
Сигнал с выхода экстрематора 22 посту- 20 пает на второй вход счетчика 24 роликов, который накапливает информацию о номере контролируемой роликовой пары. При контакте датчика 20 линейного перемещения с парой роликов противоположных рольгангов, сигнал с его выхода поступает на вход экстрематора 23. В момент достижения этим сигналом экстремального значения на выходе экстрематора 23 появляется сигнал, поступающий на первый вход блока 8 памяти, в котором запоминается
25
о значение величины раствора Н между роли о значение величины раствора Н между роли35
ками, поступаюшее на второй вход блока 8 памяти с выхода датчика 20 линейного перемещения. С выхода блока 8 памяти значение величины раствора Н между роликами поступает на третий вход регистратора 17, который регистрирует его. С выхода делителя 16 значение величины г поступает на первый вход сумматора 25, на второй вход которого поступает значение величины раствора Н между роликами. На выходе сумматора 25 получают значение величины
40 (радиус кривизны образующей.



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля технологической оси машины непрерывного литья заготовок | 1983 |
|
SU1138235A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| Инфузионный насос | 1988 |
|
SU1563702A1 |
| Устройство автоматического контроля состояния роликов и растворов между ними роликовой зоны машины непрерывного литья заготовок | 1983 |
|
SU1169788A1 |
| Скважинный профилемер | 1985 |
|
SU1317115A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МАТЕРИАЛОВ | 2009 |
|
RU2392612C1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ И РЕГИСТРАЦИИ ПРОЧНОСТНЫХ ПАРАМЕТРОВ МАТЕРИАЛОВ | 1969 |
|
SU245426A1 |
| Устройство для сварки | 1987 |
|
SU1558598A1 |
| Устройство автоматического контроля прогибов роликов машины непрерывного литья заготовок | 1985 |
|
SU1271641A1 |

Изобретение относится к металлургии, а именно к непрерывной разливке металлов, конкретнее к автоматизации машин непрерывного литья заготовок, и предназначено для контроля настройки технологического оборудования машины непрерывного литья заготовок. Цель изобретения - расширение функциональных возможностей. Предлагаемое устройство позволяет проконтролировать смещение отдельных роликовых секций в направлении, перпендикулярном технологической оси машины, их соединение одна с другой и положение участка разгиба слитка, а также определить смещение отдельных роликов в направлении, перпендикулярном технологической оси машины. 3 з.п.ф-лы, 6 ил.
ного перемещения контактирует с очередным роликом, сигнал с его выхода поступает на вход экстрематора 21, на выходе которого при достижении сигналом на выходе датчика 18 линейного перемещения экстрепроходящеи через внутренние поверхности бочек роликов больщого радиуса машины), которое поступает на первый вход сумматора 26, на второй вход которого поступает значение величины г с выхода делителя 16.
мального значения, т.е. при минимальномНа выходе сумматора 26 получают знарасстоянии от образующей бочки ролика дочение суммы величин / и г, которое поступает на вход делителя 29 на два, который делит эту сумму на два. На выходе делителя 29 на два получают значение величины
текущее значение величины угла наклона -Q радиуса кривизны технологической оси ф1, поступающее на второй вход блока 6Rtg(R-{-r)2, которое поступает на второй
памяти с выхода датчика 5 угла наклона. Аналогично при контакте датчика 19 линейного перемещения с этим роликом, сигнал с его выхода поступает на вход экстрематора 22, с выхода которого сигнал по- 55
датчика 18 линейного перемещения, появляется сигнал, поступающий на первый вход блока 6 памяти, в котором запоминается
ступает на перый вход блока 7 памяти, в котором запоминается текущее значение величины угла наклона , поступающее на
вход регистратора 17, который регистрирует его. Значение величины раствора Н между роликами поступает с выхода блока 8 памяти на первый вход блока 14 вычитания, на второй вход которого поступает с выхода программного задатчика 28 раствора роликов значение величины раствора Нз между роликами, заданного технологической ин радиуса кривизны технологической оси Rtg(R-{-r)2, которое поступает на второй
вход регистратора 17, который регистрирует его. Значение величины раствора Н между роликами поступает с выхода блока 8 памяти на первый вход блока 14 вычитания, на второй вход которого поступает с выхода программного задатчика 28 раствора роликов значение величины раствора Нз между роликами, заданного технологической инструкцией, соответствующее контролируемой роликовой паре, код номера которой поступает с выходной шины счетчика 24 роликов на вход программного задатчика 28 раствора роликов. На выходе блока 14 вычитания получают значение величины отклонения фактической величины раствора роликов от заданной технологической инструкцией, поступающее на четвертый вход регистратора 17, который регистрирует его. Кроме этого, значение величины раствора Нз между роликами с выхода программного задатчика 28 раствора роликов поступает на вход делителя 30 на два, где производится деление на два.
когда величина сигнала, поступающего пл его первый вход, больше величины сигнала с задатчика 32 (с учетом знака).
Блок памяти работает следующим образом.
Сигнал, поступающий на вход аналого- цифрового преобразователя 34 преобразуется в цифровой код и поступает на входную информационную шину буферного регистра 35. Этот код записывается в бу- 10 ферный регистр 35 в момент поступления сигнала на его вход разрешения записи. С выходной информационной шины буферного регистра 35 записанный в нем код
поступает на входную щину цифроаналогос выхода которого значение величины Яз/2 вого преобразователя 36, который преобрапоступает на первый вход сумматора 27 изует его в аналоговый сигнал.
на второй вход блока 11 вычитания. КодПрограммный задатчик работает следуюномера контролируемой роликовой пары сщим образом.
выходной шины счетчика 24 роликов посту-На входную адресную шину аналогопает на вход программного задатчика 9вого коммутатора 38 поступает код номера
радиуса кривизны, с выхода которого20 контролируемой пары роликов, что вызызначение величины радиуса кривизны технологической оси , заданное технологической инструкцией, поступает на первый вход блока 11 вычитания и на второй вход
вает подключение к аналоговому выходу аналогового коммутатора 38 одного из входов его входной ин4юрмационной шины, на который поступает сигнал с соответсумматора 27. На выходе блока 11 вычита-ствующего задатчика константы из блока 37
НИИ получают значение разности величин R:no И Яз/2, поступающее на первый вход блока 12 вычитания, на второй вход которого с выхода делителя 16 поступает значение величины г. На выходе блока 12
задатчиков констант, обеспечивая тем самым появление на аналоговом выходе аналогового коммутатора 38 аналогового сигнала заданной величины.
Делитель 29 (30) на два представляет
вычитания получают значение величины зо собой усилитель с коэффициентом передачи
смещения б2 / зто-Яз/2-г) ролика по малому радиусу машины в направлении, перпендикулярном технологической оси машины, поступающее на первый вход регистратора 17, который регистрирует его. На
.
В качестве датчика 5 угла наклона может быть использованы датчик типа ПИКП1-A3. Чтобы обеспечить измерение угла наклона статор преобразователя жествыходе сумматора 27 получают значение 35 о прикрепляется с внутренней стороны
суммы величин и , поступающее на первый вход блока 15 вычитания, на второй вход которого с выхода сумматора 25 поступает значение величины R. На выходе блока 15 вычитания получают значение величины смещения 6з / зто-|-Я /2-R ролика по большому радиусу машины в направлении, перпендикулярном технологической оси машины, поступающее на пятый вход регистратора 17, который регистрирует его.
40
шаблона 1 к той его стенке, которая контактирует с роликами по мало.му радиусу машины, а к ротору жестко прикрепляется груз в виде маятника, который под действием силы тяжести всегда принимает вертикальное положение.
В качестве датчиков 18, 19 и 20 линейного перемещения могут быть использованы датчики типа ПИЛП1-А2.
Счетчик 24 роликов и буферный регистр
зом.
Экстрематор работает следующим обра- д 35 могут быть выполнены на микросхемах
серии К155, делители 29 и 30 на два - на микросхемах серии К140, аналого-цифровой преобразователь 34 и цифроаналого- вый преобразователь 36 - на микросхе- .мах серии К572, аналоговый коммутатор
При достижении какой-либо переменной величиной экстремального значения первая производная этой величины равна нулю. Поэтому при достижении входным сигналом.
поступающим на вход дифференциатора 50 38 - на микросхемах серии КР590.
31, экстремального значения величина сигнала на выходе дифференциатора 31 равна нулю, на первый вход нуль-органа 33 поступает сигнал, величина которого равна нулю. Сигнал такой же величины выставлен на
Остальные блоки могут быть выполнены с использованием агрегатного комплекса электрических средств регулирования в микроэлектронном исполнении (АКЭСР), а именно: в качестве блоков вычитания 11 -15, выходе задатчика 32 и поступает на второй 55 сумматоров 25-27 и делителя 16 могут быть вход нуль-органа 33.использованы блоки вычислительных операНуль-орган 33 переключается в состоя-ций типа БВО-П, в качестве задатчика
ние логической единицы тогда (фиг. 6),10 длины дуги, задатчика 32 и блока 37
когда величина сигнала, поступающего пл его первый вход, больше величины сигнала с задатчика 32 (с учетом знака).
Блок памяти работает следующим образом.
Сигнал, поступающий на вход аналого- цифрового преобразователя 34 преобразуется в цифровой код и поступает на входную информационную шину буферного регистра 35. Этот код записывается в бу- ферный регистр 35 в момент поступления сигнала на его вход разрешения записи. С выходной информационной шины буферного регистра 35 записанный в нем код
поступает на входную щину цифроаналоговает подключение к аналоговому выходу аналогового коммутатора 38 одного из входов его входной ин4юрмационной шины, на который поступает сигнал с соответзадатчиков констант, обеспечивая тем самым появление на аналоговом выходе аналогового коммутатора 38 аналогового сигнала заданной величины.
Делитель 29 (30) на два представляет
собой усилитель с коэффициентом передачи
.
В качестве датчика 5 угла наклона может быть использованы датчик типа ПИКП1-A3. Чтобы обеспечить измерение угла наклона статор преобразователя жест о прикрепляется с внутренней стороны
40
шаблона 1 к той его стенке, которая контактирует с роликами по мало.му радиусу машины, а к ротору жестко прикрепляется груз в виде маятника, который под действием силы тяжести всегда принимает вертикальное положение.
В качестве датчиков 18, 19 и 20 линейного перемещения могут быть использованы датчики типа ПИЛП1-А2.
Счетчик 24 роликов и буферный регистр
д 35 могут быть выполнены на микросхемах
задатчиков констант - ручные задатчики типа РЗД, в качестве дифференциатора 31 - блок регулирующий аналоговый типа РБА-П, в качестве нуль-органа 33 может использоваться блок кондуктивного разделения с двумя нуль-органами типа БКР-ЗП.
Формула изобретения
10
вым входом третьего боЮка памяти, выход которого соединен с третьим входом регистратора, выход третьего блока памяти соединен с первым входом четвертого блока вычитания, выход которого соединен с Mf- вертым входом регистратора, выходная шина счетчика роликов соединена с входом программного задатчика раствора роликов, выход которого соединен с вторым входом четвертого блока вычитания, выход программного задатчика раствора роликов соединен с входом второго делителя на два, выход которого соединен с первым входом третьего сумматора, выход которого соединен с первым входом пятого блока вычитания, выход
вычитания и тремя сумматорами, причем выход ключа соединен с первым входом счетчика роликов, выходная шина которого соединена с входом программного задатчика
радиуса кривизны, выход которого соединен зо ключа соединен с входо с первым входом первого блока вычитания, выход которого соединен с первым входом второго блока вычитания, выход которого соединен с первым входом регистратора, выход первого датчика линейного перемещения соединен с входом пер- 35 с выходом задатчика. вого экстрематора, выход которого соеди-3. Устройство по
нен с первым входом первого блока памяти, выход которого соединен с первым входом третьего блока вычитания, выход которого соединен с первым входом делителя, выход которого соединен с первым
на два соединен с вторым входом первого блока вычитания, выход программного задатчика радиуса кривизны соединен с вто- два, программным задатчи-рым входом третьего сумматора, выход
роликов, четырьмя блокамиделителя соединен с вторым входом второго блока вычитания, выход первого сумматора соединен с вторым входом пятого блока вычитания, выход делителя соединен с вторым входом второго сумматора, выход
электропривода.
40
I, отличающееся
тем, что блок памяти ссдержит аналого- цифровой преобразовате.ль, буферный регистр с входной инфор.мационной шиной, входом разрешения записи и выходной информационной шиной, цифроаналоговый преобразователь, причем выходная тина аналого-цифрового преобразователя соединена с входной lнфop ;al;.иoIii-;oй iiiimoii буферного регистра, выходная инфор.мацивходом первого сумматора, выход которого соединен с первым входом второго сумматора, выход которого соединен с входом первого делителя на два, выход которого
соединен с вторым входом регистратора, 45 онная шина которого соединена
ной шиной цифроаналогового прео теля.
выход второго датчика линейного перемещения соединен с входом второго экстрематора, выход которого соединен с первым входом второго блока памяти, выход которого соединен с вторым входом третьего
с входной шиной цифроаналогового преобразователя.
экстрематора, выход которого соединен с пер- 55 гового ком.мутатора.
0
вым входом третьего боЮка памяти, выход которого соединен с третьим входом регистратора, выход третьего блока памяти соединен с первым входом четвертого блока вычитания, выход которого соединен с Mf- вертым входом регистратора, выходная шина счетчика роликов соединена с входом программного задатчика раствора роликов, выход которого соединен с вторым входом четвертого блока вычитания, выход программного задатчика раствора роликов соединен с входом второго делителя на два, выход которого соединен с первым входом третьего сумматора, выход которого соединен с первым входом пятого блока вычитания, выход
которого соединен с пятым входом ре- гистратора, выход третьего блока памя- ти соединен с вторым входом первого сумматора, выход третьего датчика линей- ного перемещения соединен с вторым вхо- дом третьего блока памяти, выход второго 0 экстрематора соединен с вторым входом счетчика роликов, выход второго делителя
ключа соединен с входо с выходом задатчика. 3. Устройство по
I, отличающееся
тем, что блок памяти ссдержит аналого- цифровой преобразовате.ль, буферный регистр с входной инфор.мационной шиной, входом разрешения записи и выходной информационной шиной, цифроаналоговый преобразователь, причем выходная тина аналого-цифрового преобразователя соединена с входной lнфop ;al;.иoIii-;oй iiiimoii буферного регистра, выходная инфор.маци онная шина которого соединена
с входной шиной цифроаналогового преобразователя.
/7
zl/ 177
фиг.
Фие.2
Фие.З
%,5
Фие.6
| Устройство контроля технологической оси машины непрерывного литья заготовок | 1983 |
|
SU1138235A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
