Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов.
Целью изобретения является повышение производительности за счет совмещения по времени перемещений рабочего органа и обрабатываемой детали.
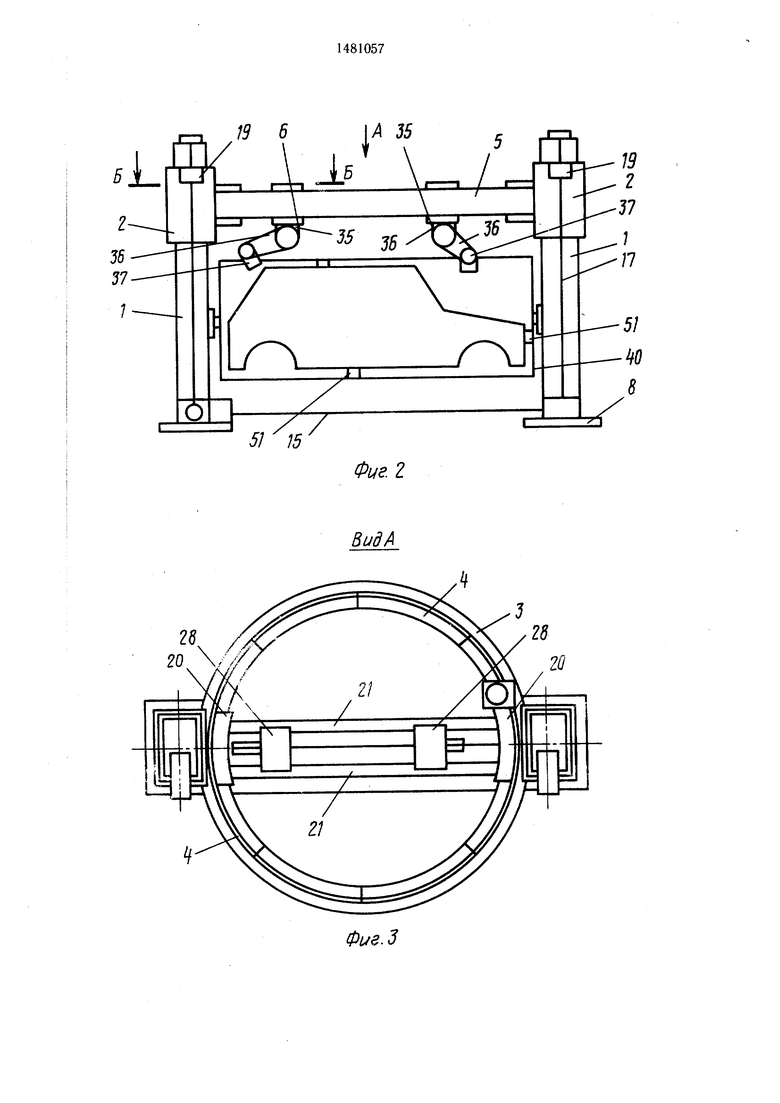
На фиг. 1 представлен промышленный робот, общий вид; на фиг. 2 - то же, с позиционером, в котором установлена боковина кузова (стяжка не показана), общий вид; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - кинематическая схема промышленного робота; на фиг. 5 - разрез Б-Б на фиг 2; на фиг. 6 - разрез В-В на фиг. 5; на фиг. 7 - механизм фиксации детали в позиционере.
Промышленный робот содержит колонны 1, на которых установлены дополнительные каретки 2 с приводом их перемещения, несущие балку 3 в виде полого кольца коробчатого сечения, размещенную в горизонтальной плоскости, Г-образные направляющие 4, закрепленные одной из полок на внутренней поверхности балки 3, основную каретку 5 с механическими руками 6, размещенную на Г-образных направляющих балки 3, и систему управления 7.
Колонны 1 установлены на фундаменте посредством опорных платиков 8, а верхние их концы жестко связаны между собой стяжкой 9, на которой закреплена площадка 10 с системой 7 управления. С площадкой 10 связана лестница 11.
Привод перемещения дополнительных кареток 2 включает двигатель 12, закрепленный на одной из колонн 1, выходной вал которого связан с ведущим шкивом 13 зубчато-ременной передачи, ведомый шкив 14 ее установлен на промежуточном валу 15, связанном посредством конических передач 16 с винтами 17 шарико-винтовых передач, установленных в подшипниках 18, закрепленных на колоннах 1, а гайки 19 шарико- винтовых передач связаны с дополнительными каретками 2. Основная каретка 5 выполнена в виде двух сегментных элементов 20, жестко связанных между собой двумя направляющими 21 и установленных на Г-образных направляющих 4 посредством роликов 22 и 23, причем ролики 22 контактируют с горизонтальной полкой Г-образных направляющих, а ролики 23 - с вертикальной полкой этих направляющих.
Привод перемещения основной каретки 5 включает двигатель 24, установленный на одном из сегментных элементов 20, и зубчатую передачу, ведущее колесо 25 которой установлено на выходном валу двигателя 24, а ведомое колесо 26 смонтировано на наружной поверхности вертикальной полки Г-образных направляющих 4. На направляющих 21 основной каретки посредством роликов 27 установлены каретки 28 механических рук 6 с приводами их перемещений.
0
Каждый из приводов перемещений кареток 28 механических рук 6 имеет двигатель 29, установленный на каретке, зубчато- ременную и шарико-винтовую передачи, причем ведущий шкив 30 связан с выходным валом, а ведомый шкив 31 жестко связан с гайкой 32 винтовой передачи, установленных на подшипниках 33. При этом винт 34 винтовой передачи своими концами закреплен на сегментных элементах 20. Механические руки 6 имеют три степени подвижности и кисть 38 с рабочим органом 39, например клещами, пистолетом и т.п.
Позиционер для установки обрабатываемой детали выполнен в виде рамы 40 с при5 водом ее вращения и механизмом фиксации. Рама 40 установлена на левой колонне 1 посредством оси 41 и подшипников 42.
Привод вращения рамы 40 выполнен в виде двигателя 43, закрепленного на правой колонне 1 зубчато-ременной передачи, ведущий шкив 44 установлен на выходном валу двигателя, а ведомый шкив 45 - на входном валу волнового редуктора 46, связанном с генератором волн, а его выходной элемент 47 - цапфа гибкого колеса же5 стко связан с рамой 40, причем жесткое колесо 48 волнового редуктора жестко связано с правой колонной 1, а рама 40 с другой стороны установлена на корпусе 49 волнового редуктора 46 посредством подшипников 50. Механизм фиксации обрабаты0 ваемой детали установлен на раме 40 и выполнен в виде силовых цилиндров 51, на штоках 52 которых установлены прихваты 53. Промышленный робот работает следующим образом.
При перемещении механических рук 6 в
5 вертикальной плоскости от системы 7 управления поступает сигнал на двигатель 12, который начинает работать, вращается ведущий шкив 13 и через зубчатый ремень вращает ведомый шкив 14 и промежуточный
вал 15 с ведущими колесами конических передач 16. Ведущие колеса приводят в действие ведомые колеса конических передач и винты 17. Винты 17 вращаются и через гайки 19 воздействуют на дополнительные каретки 2, которые начинают переме5 щаться вверх или вниз в зависимости от направления вращения винтов 17. Вместе с дополнительными каретками 2 перемещается балка 3 с установленными на нем механизмами, в том числе и с механическими руками 6
0При перемещении механических рук 6 в горизонтальной плоскости вокруг вертикальной оси от системы 7 управления поступает сигнал на двигатель 24, который начинает работать, вращается ведущее зубчатое колесо 25, в результате чего ведущее зубчатое
5 колесо 25 с двигателем 24, сегментными элементами 20, направляющими 21 и установленными на этих направляющих 21 механизмами перемещаются в горизонтальной плоскости, вращаясь вокруг вертикальной оси полого кольца балки 3.
При перемещении механических 6 рук в горизонтальной плоскости вдоль направляющих 21 от системы 7 управления по- ступает сигнал на двигатели 29 кареток 28, работающие автономно один от другого. Двигатели 29 начинают работать, вращаются ведущие шкивы 30 и через зубчатые ремни вращают ведомые шкивы 31 с гайка- ми 32. Гайки 32 вращаются в подшипниках 33 и через них воздействуют на каретки 28. Каретки 28 при помощи роликов 27 перемещаются по направляющим 21. Вместе с каретками 28 перемещаются механические руки 6.
При перемещении механических рук от системы 7 управления поступают сигналы на три степени 35-37 подвижности, выходные звенья которых начинают вращаться вокруг своих осей. Степень 35 подвижности осу- ществляет вращение вокруг вертикальной оси, а степени 36 и 37 - вращение вокруг горизонтальных осей.
Рабочий орган, закрепленный на кисти 38,работает следующим образом. В зависимости от типа производства на кисти 38 мо- гут быть закреплены клещи, пистолет или иные оружия, работой которых управляет система 7 управления. Приводы промышленного робота по команде от системы 7 управления доставляют рабочий орган в нужную точку пространства.
При работе позиционера от системы 7 управления поступает сигнал на двигатель 43, ведущий шкив 44 начинает вращаться и через зубчатый ремень вращает ведомый шкив 45, в волновом редукторе 46 происходит преобразование параметров вращения, вращается гибкое колесо 47 и сообщает вращение раме 40, которая начинает вращаться относительно оси 41 и корпуса 49 волнового редуктора 46, установленных со- осно. В раме 40 закрепляется боковина ку- зова или иная обрабатываемая деталь, которые крепятся при помощи механизмов фиксации. При поступлении рабочей среды в штоковую полость силовых цилиндров 51 штоки 52 с прихватами 53 перемещаются и прижимают боковину к раме 40.
При поступлении рабочей среды в бес- штоковые полости силовых цилиндров 51 штоки 52 с прихватами 53 перемещаются и освобождают боковину. При установке и снятии боковины с рамы 40 последняя ус- танавливается в горизонтальное положение. Вращение рамы 40 происходит взаимосвязано со степенями подвижности промышленного робота.
Формула изобретения
1.Промышленный робот, содержащий колонны, балку с направляющими, основную каретку с механическими руками, установленную на направляющих балки, приводы перемещения основной каретки и механических рук и систему управления, отличающийся тем, что, с целью повышения производительности за счет совмещения операций перемещения обрабатываемой детали и рабочего органа, он снабжен дополнительными каретками с приводами их перемещений, жестко связанными с балкой и установленными на колоннах, позиционером с приводом его перемещений и с механизмами фиксации деталей и осью, закрепленной на одной из колонн и расположенной перпендикулярно продольной оси колонны, причем позиционер установлен с возможностью вращения относительно этой оси, а балка выполнена в виде полого кольца, при этом направляющие выполнены Г-образ ными, и вертикальная полка этих направляющих жестко связана с внутренней поверхностью полою кольца, а привод перемещения основном каретки выполнен в виде двигателя и з бчатой передачи, ведущее кольцо которой листко связано с выходным валом двигателя, ti ведомое колесо закреплено на наружной поверхности вертикальной полки Г-образных направляющих.
2.Робот по п. 1, отличающийся тем, что привод перемещения дополнительных кареток выполнен в виде двигателя, установленного на одной из колонн, промежуточного вала, а также конических и шарико-вин- товых передач, винты которых установлены на колоннах, а гайки жестко связаны с дополнительными каретками, причем концы винтов посредством конических передач связаны с концами промежуточного вала, кинематически связанного с выходным валом двигателя.
3.Робот по п. 1, отличающийся тем, что привод позиционера выполнен в виде двигателя, закрепленного на колонне, и волнового редуктора, жесткое колесо которого жестко связано с колонной, гибкое колесо связано с рамой позиционера, а генератор волн кинематически связан с выходным валом двигателя.
4.Робот по п. 1, отличающийся тем, что, с целью повышения удобства в обслуживании и экономии производственных площадей, он снабжен площадкой и лестницей, причем площадка закреплена на верхних торцах колонн, а лестница жестко связана с площадкой, при этом система управления установлена на площадке.
19 6
51 15
А 35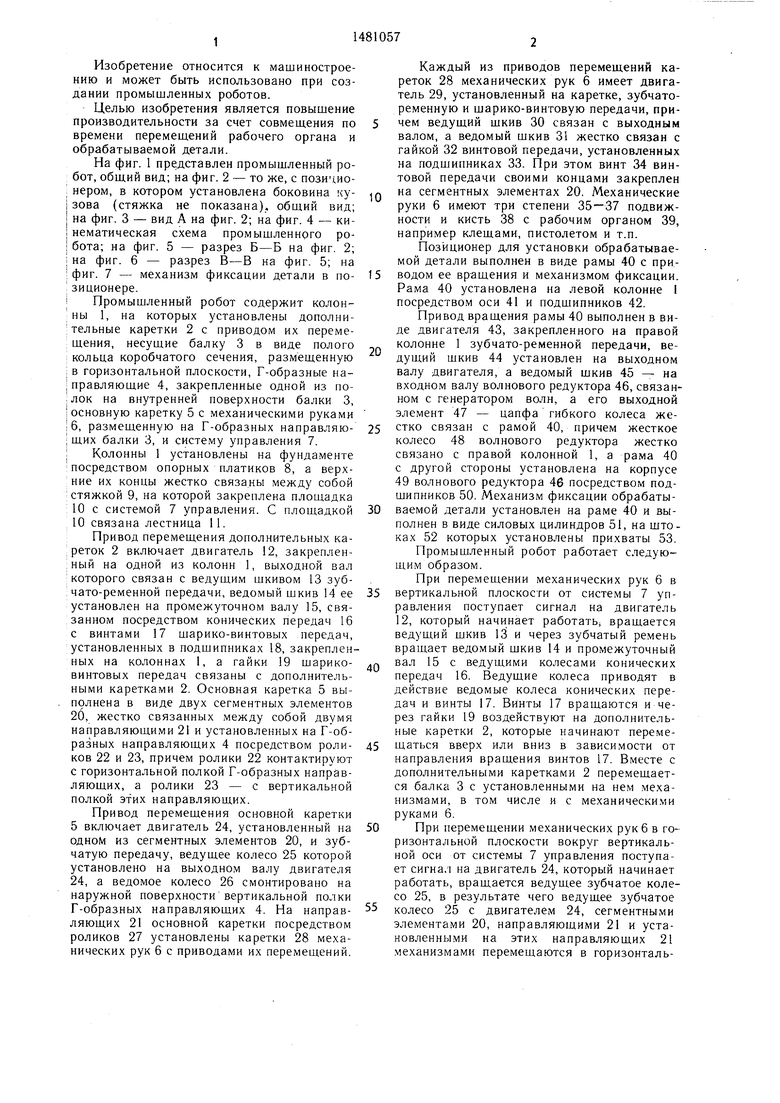

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1987 |
|
SU1481056A1 |
| Робототехнический сборочно-сварочный комплекс | 1987 |
|
SU1537475A1 |
| Промышленный робот | 1986 |
|
SU1421523A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Устройство для сбора мусора с проезжей части улично-дорожной сети населённых пунктов | 2021 |
|
RU2757688C1 |
| Устройство для переноса заготовок | 1983 |
|
SU1260075A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ГРЕБЦОВ | 2000 |
|
RU2201785C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Устройство для разгрузки и перемещения элементов крепи | 1982 |
|
SU1041696A1 |

Изобретение относится к области машиностроения и может быть использовано при создании промышленных роботов. Целью изобретения является повышение производительности робота за счет совмещения операции перемещений рабочего органа и обрабатываемой детали. Промышленный робот снабжен позиционером в виде рамы 40 с механизмами фиксации, установленным на колоннах 1 с возможностью вращения. Механические руки 6, перемещаясь в вертикальной плоскости посредством дополнительных кареток, в горизонтальной плоскости за счет поворота основной каретки, установленной в Г-образных направляющих балки , выполненной в виде полого кольца, а также за счет трех собственных степеней подвижности и перемещений вдоль направляющих основной каретки, обеспечивают подвод рабочих органов к обрабытываемой поверхности детали. Позиционер приводится в движение от двигателя, закрепленного на колонне и передающего вращение на генератор волн волнового редуктора, жесткое колесо которого жестко связано с колонной, а гибкое колесо передает вращение на раму 40 позиционера. Перемещение механических рук 6 в горизонтальной плоскости обеспечивается приводом перемещений основной каретки, ведомое колесо зубчатой передачи которого закреплено на наружней поверхности вертикальной полки Г-образной направляющей. Перемещение механических рук 6 в вертикальной плоскости обеспечивается приводом дополнительных кареток, имеющим конические и шариковинтовые передачи, связанные промежуточным валом с двигателем. 3 з.п.ф-лы, 7 ил.
26
20
Ч
Фие.З
Фце.г
ВидА
28
20
16
Фиг. 5
14
Фиг.Ч
б-б
т т-.
21
Фиг 6
Физ 1
| Андре П | |||
| и др | |||
| Конструирование роботов.-М.: Мир, 1986, с | |||
| Канальная печь-сушильня | 1920 |
|
SU230A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
