(Л
Г
31509479
перемещения посредством гидроцилиндра (ГЦ) 3 в направляющей втулке 2, размещенной на конце рукояти 8. Один конец ГЦ 3 закреплен на рукояти 8, а другой - на КС 1, При этом КС 1 имеет продольный паз, в нижней части которого шарнирно закреплен упор 9, связанный через тягу 10 с рычагом 11, Рабочий орган монтируется на рукояти 8 Q посредством проушин 4,5 и пальцев 6,7. Цри извлечении бордюра КС 1 устанавливается по его середине касательно наружной его стороны. При включении ГЦ 3, КС 1 внедряется в грунт,перемещаясь во втулке 2 параллельно плоскости бордюра. При внедрении КС 1 на глубину, соответствующую высоте бордюра, рычаг.11 опирается на втулки 2 и посредством тяги 10 .поворачивает упор 9. Последний воздействует на бордюр, прижимая его в демпфирующему упору 12, и надежно удерживает. При включении ГЦ управления рукоятью 8 бордюр извлекается. 4 ил..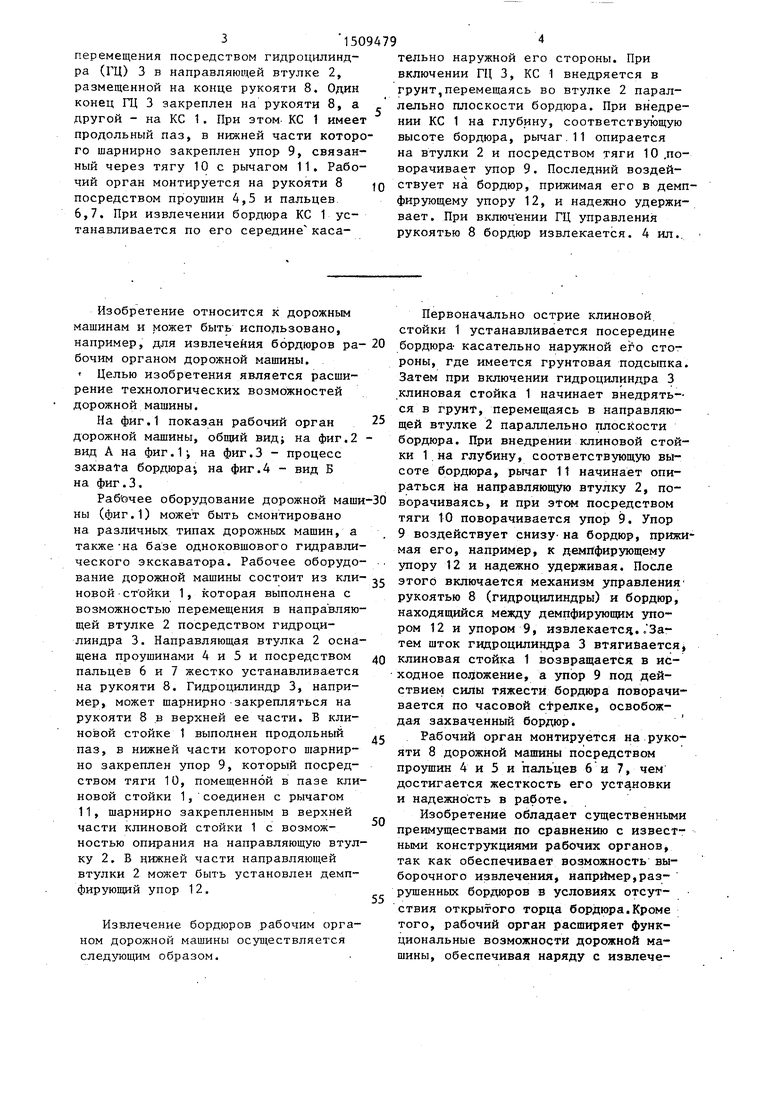
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование гидравлического экскаватора | 1990 |
|
SU1778245A1 |
| Рабочее оборудование гидравлического экскаватора | 1985 |
|
SU1302000A1 |
| МАНИПУЛЯТОР ДЛЯ УКЛАДКИ ДОРОЖНЫХ БОРДЮРОВ И ПЛИТКИ | 2024 |
|
RU2837513C1 |
| Рабочее оборудование одноковшового экскаватора | 1977 |
|
SU713948A1 |
| Погрузочно-транспортная машина | 1988 |
|
SU1700160A1 |
| Устройство для соединения рабочего органа с рукояткой экскаватора | 1985 |
|
SU1283302A1 |
| КОВШОВЫЙ ГИДРОЗАХВАТ ЭКСКАВАТОРА | 1992 |
|
RU2039159C1 |
| ЭКСКАВАТОРНОЕ ОБОРУДОВАНИЕ | 1990 |
|
RU2026930C1 |
| Рабочее оборудование бордюроукладчика | 1988 |
|
SU1585425A1 |
| Рабочее оборудование гидравли-чЕСКОй эКСКАВАциОННОй МАшиНы | 1978 |
|
SU831902A1 |
Изобретение относится к дорожным машинам и может быть использовано, например, для извлечения бордюров. Цель - расширение технологических возможностей дорожной машины. Рабочее оборудование дорожной машины включает рабочий орган в виде клиновой стойки (КС) 1, размещенной с возможностью перемещения посредством гидроцилиндра (ГЦ) 3 в направляющей втулке 2, размещенной на конце рукояти 8. Один конец ГЦ 3 закреплен на рукояти 8, а другой - на КС 1. При этом КС 1 имеет продольный паз, в нижней части которого шарнирно закреплен упор 9, связанный через тягу 10 с рычагом 11. Рабочий орган монтируется на рукояти 8 посредством проушин 4,5 и пальцев 6,7. При извлечении бордюра КС 1 устанавливается по его середине касательно наружной его стороны. При включении ГЦ 3, КС 1 внедряется в грунт перемещаясь во втулке 2 параллельно плоскости бордюра. При внедрении КС 1 на глубину, соответствующую высоте бордюра, рычаг 11 опирается на втулки 2 и посредством тяги 10 поворачивает упор 9. Последний воздействует на бордюр, прижимая его к демпфирующему упору 12, и надежно удерживает. При включении ГЦ управления рукоятью 8 бордюр извлекается. 4 ил.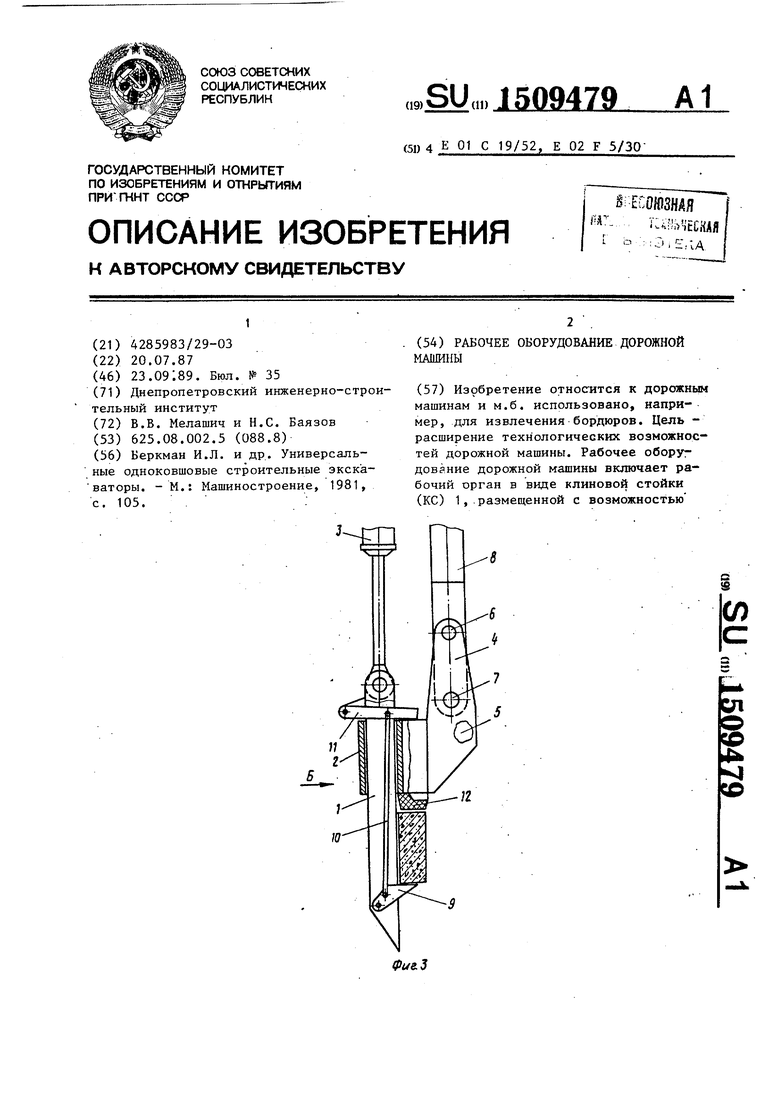
Изобретение относится к дорожным машинам и может быть исподьзовано, например, для извлечейия бордюров ра- бочим органом дорожной машины. Целью изобретения является расширение технологических возможностей дорожной машины.
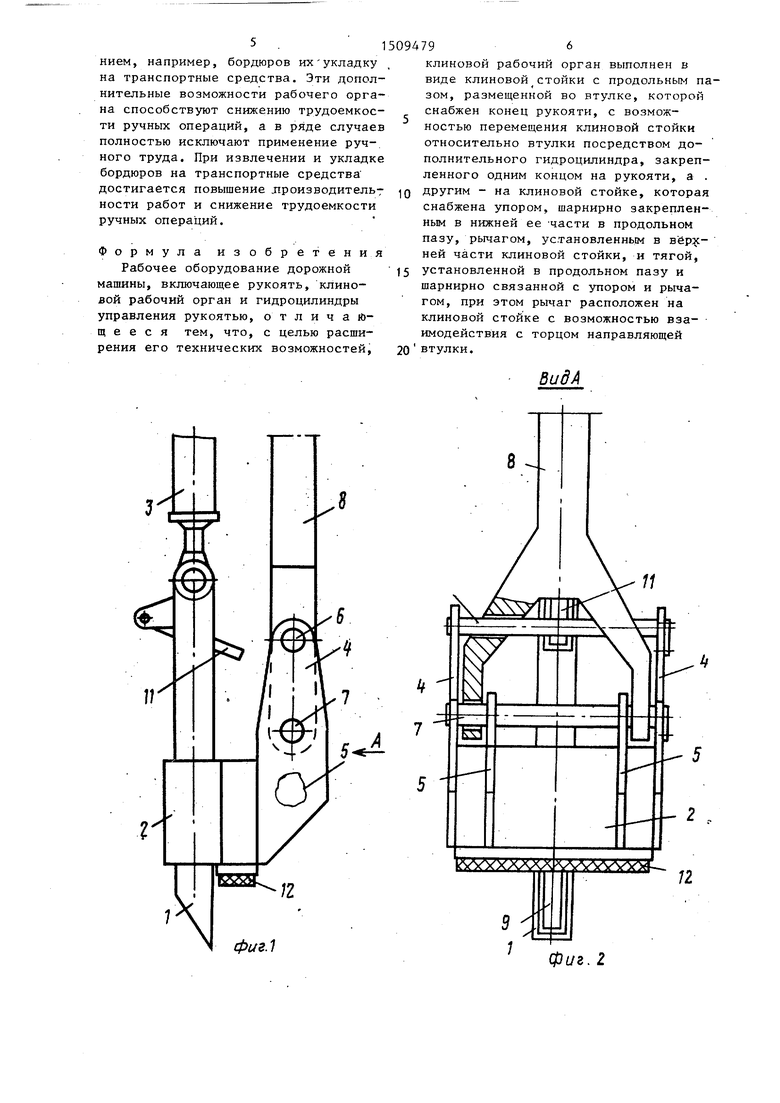
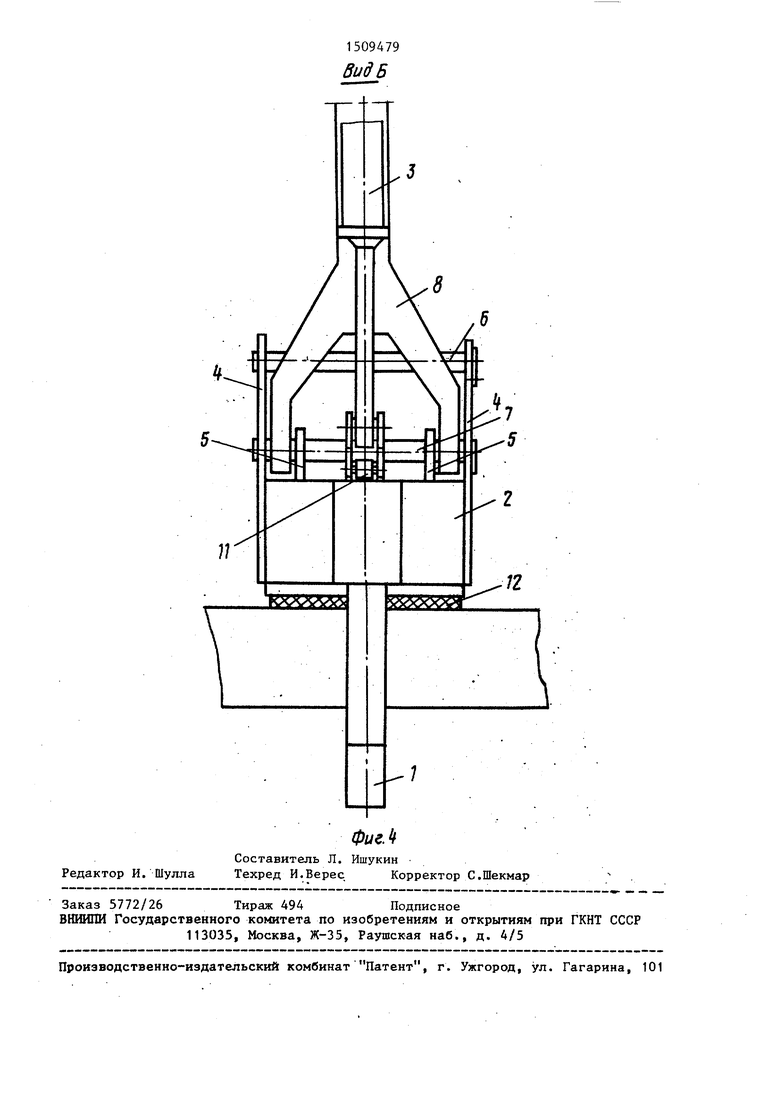
На фиг.1 показан рабочий орган дорожной машины, общий вид; на фиг.2 вид А на фиг.и на фиг.З - процесс захвата бордюра-, на фиг.4 - вид Б на фиг.3.
Раб очее оборудование дорожной маши ны (фиг.1) может быть смонтировано на различных типах дорожных машин, а также-на базе одноковшового гидравлического экскаватора. Рабочее оборудо вание дорожной машины состоит из кли новой стойки 1, которая выполнена с возможностью перемещения в направляющей втулке 2 посредством гидроцилиндра 3. Направляющая втулка 2 оснащена проушинами 4 и 5 и посредством пальцев 6 и 7 жестко устанавливается на рукояти 8. Гидроцилиндр 3, например, может шарнирно-закрепляться на рукояти 8 в верхней ее части. В клиновой стойке 1 выполнен продольный паз, в нижней части которого шарнирно закреплен упор 9, который посредством тяги 10, помещенной в пазе клиновой стойки 1, соединен с рычагом 11, шарнирно закрепленным в верхней части клиновой стойки 1 с возможностью опирания на направляющую втулку 2. В нижней части направляющей втулки 2 может быть установлен демпфирующий упор 12.
Извлечение бордюров рабочим органом дорожной машины осуществляется следующим образом.
5
0 . c Q
0
5
Первоначально острие клиновой, стойки 1 устанавливается посередине бордюра- касательно наружной efo стороны, где имеется грунтовая подсыпка. Затем при включении гидроцилиндра 3 клиновая стойка 1 начинает внедряться в грунт, перемещаясь в направляющей втулке 2 параллельно плоскости бордюра. При внедрении клиновой стойки 1 на глубину, соответствующую высоте бордюра, рычаг П начинает опираться на направляющую втулку 2, поворачиваясь, и при посредством тяги 10 поворачивается упор 9. Упор 9 воздействует снизу-на бордюр, прижимая его, например, к демпфирующему упору 12 и надежно удерживая. После этого включается механизм управления рукоятью 8 (гидроцилиндры) и бордюр, находящийся между демпфирующим упором 12 и упором 9, извлекаете. . Затем шток гвдроцилин ра 3 втягивается, клиновая стойка 1 возвращается в исходное положение, а упор 9 под действием силы тяжести бордюра поворачивается по часовой ctpeflxe, освобождая захваченный бордюр.
Рабочий орган монтируется на рукояти 8 дорожной машины посредством проушин 4 и 5 и пальцев 6 и 7, чем достигается жесткость его установки и надежность в работе.
Изобретение обладает существенными преимуществами по сравнению с известными конструкциями рабочих органов, так как обеспечивает возможность выборочного извлечения, например,разрушенных бордюров в условиях отсутствия открытого торца бордюра,Кроме того, рабочий орган расширяет функциональные возможности дорожной машины, обеспечивая наряду с извлече5 .1
нием, например, бордюров их укладку на транспортные средства. Эти дополнительные возможности рабочего органа способствуют снижению трудоемкости ручных операций, а в ряде случаев полностью исключают применение ручного труда. При извлечении и укладке бордюров на транспортные средства достигается повышение лроизводительт ности работ и снижение трудоемкости ручных операций.
Формула изобретен и я
Рабочее оборудование дорожной машины, включающее рукоять, клиновой рабочий орган и гидроцилиндры управления рукоятью, отличающееся тем, что, с целью расщи- рения его технических возможностей.
фиг.1
094796
клиновой рабочий орган выполнен в виде клиновой стойки с продольным пазом, размещенной во втулке, которой снабжен конец рукояти, с возможностью перемещения клиновой стойки относительно втулки посредством дополнительного гидроцилиндра, закрепленного одним концом на рукояти, а .
10 другим - на клиновой стойке, которая снабжена упором, шарнирно закрепленным в нижней ее -части в продольном пазу, рычагом, установленным в верхней части клиновой стойки, и тягой,
15 установленной в продольном пазу и шарнирно связанной с упором и рычагом, при этом рычаг расположен на клиновой стойке с возможностью взаимодействия с торцом направляющей
20 втулки.
ВидА
П
фиг. 2
| Ьеркман И.Л | |||
| и др. | |||
| Универсальные одноковшовые строительные экска- ваторы | |||
| - М.: Машиностроение, 1981, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| . | |||
