Изобретение относится к машиностроению, а именно к манипуляторам с балансировкой груза.
Цель изобретения - повьш1ение безопасности работы при разгерметизации разделителя сред силового цилиндра.
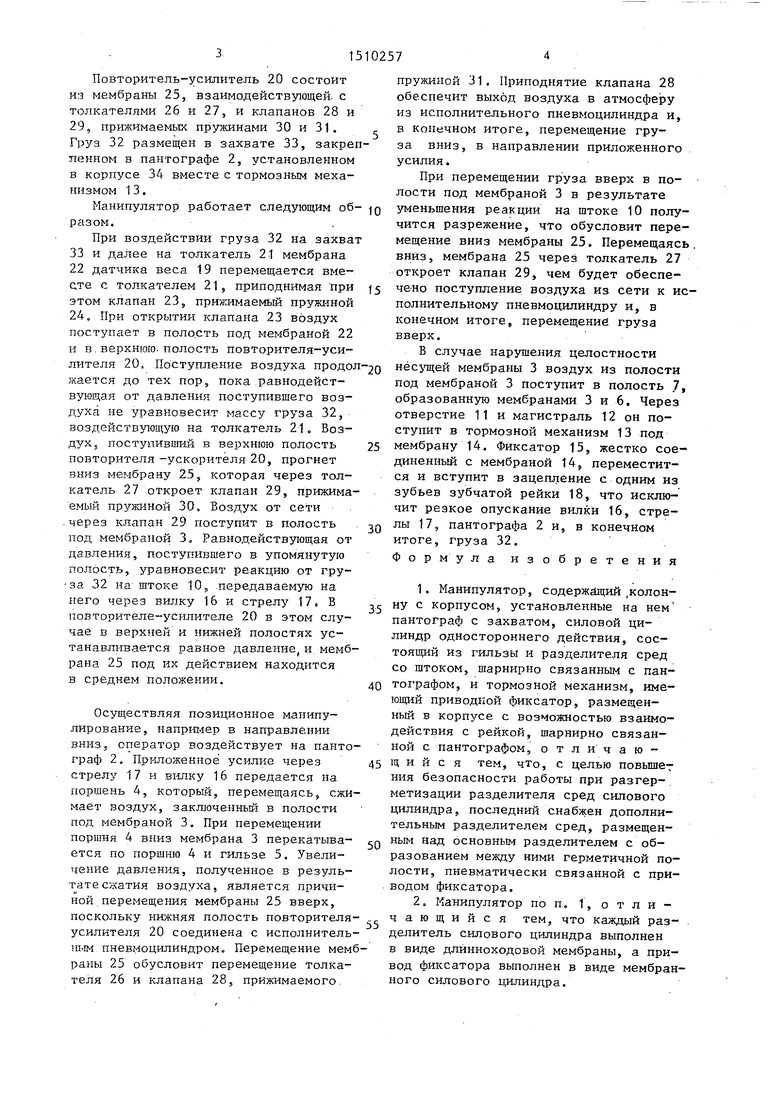
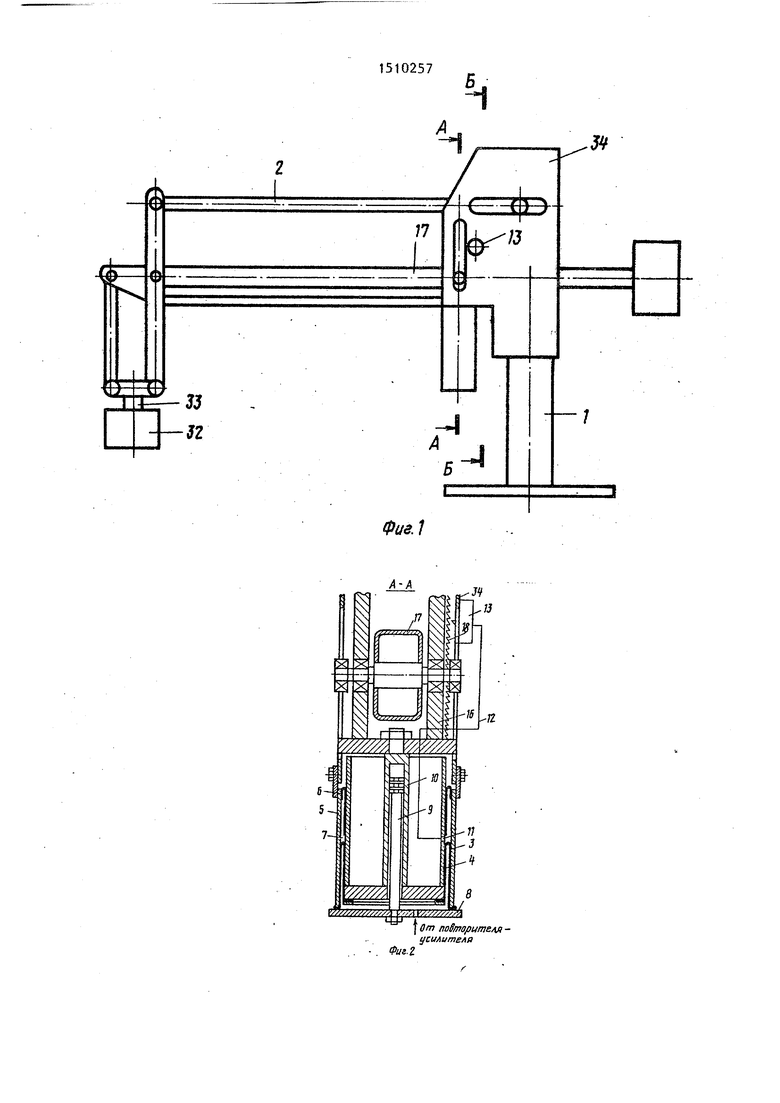
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-В на фиг. 1; на фиг. 4 - пневматическая схема манипулятораW
Манипулятор Содержит колонну 1, стреловую систему в виде пантографа 2, силовой цилиндр, который состоит из разделителей сред в виде длинно- ходовой несущей мембраны 3, закрепленной одним концом на поршне 4, а другим - на гильзе 5, и предохрани- тельной мембраны 6, закрепленной одним концом в средней части поршня 4,
а другим концом - по верхнему краю гильзы 5. Мембраны 3 и 6, поршень 4 и гильза 5 образуют полость 7. В днище 8 установлен направляющий стержень 9,. имеющий возможность взаимодействия со штоком 10, закрепленным в поршне 4. В поршне 4 выполнено отверстие 11, через которое магистраль 12 и полость 7 соединяется с тормозным механизмом 13, состоящим из мембраны 14 с фиксатором 15. На вилке 16, на ко торой закреплена стрела 17 пантографа 2, установлена зубчатая рейка 18.
Система управления манипулятором состоит из датчика веса 19 и повторителя-усилителя 20. Датчик веса 19 состоит из толкателя 21, соединенного ;с мембраной 22, и клапана 23, прижимаемого пружиной 24.
О
ю
Сд SI
Повторитель-усилитель 20 состоит и:з мембраны 25, взаимодействующей, с толкателями 26 и 27, и клапанов 28 и 29, прижимаемых пру} шнами 30 и 31. Груз 32 размещен в захвате 33, закрепленном в пантографе 2, установленном в корпусе 34 вместе с тормозным механизмом 13.
Манипулятор работает следующим об- разом.
При воздействии груза 32 на захват 33 и далее на толкатель 21 мембрана 22 датчика веса 19 перемещается вместе с толкателем 21, приподнимая при этом клапан 23, прижимаемый пружиной 24, При открытии клапана 23 воздух поступает в полость под мембраной 22 и в.верхнюю, полость повторителя-усилителя 20. Поступление воздуха продол жается до тех пор, пока .равнодействующая от давления поступившего воздуха не уравновесит массу груза 32, воздействующз ю на толкатель 21. Воздух, поступивпюй в верхнюю полость повторителя -ускорителя 20, прогнет вниз мембрану 25, которая через толкатель 27 откроет клапан 29, прижимаемый прулгиной 30. Воздух от сети .через клапан 29 поступит в полость под мембраной 3, Равнодействующая от давления, поступившего в упомянутую полость, уравновесит реакцию от гру- -за 32 на штоке 10, .передаваемую на него через вилку 16 и стрелу 17 В повторителе-усилителе 20 в этом случае в верхней и нижней полостях устанавливается равное давление, и, мембрана 25 под их действием находится в среднем положении.
Осуществляя позиционное манипулирование, Hanpm-iep в направлении вниз, оператор воздействует на пантограф 2. Приложенное усилие через стрелу 17 и вилку 16 передается на поршень 4, которыйу перемещаясь, сжимает воздух, заключенный в полости под мембраной 3. При перемещении поршня 4 вниз мембрана 3 перекатыва- ется по поршню 4 и гильзе 5. Увели- т{ение давления, полученное в результате сжатия воздуха, является причиной перемещения мембраны 25 вверх, поскольку нижняя полость повторителя усилителя 20 соединена с исполнительным пневмоцилиндром. Перемещение мемраны 25 обусловит перемещение толкателя 26 и клапана 28, прижимаемого.
Q Q
5 п ,
-5
пружиной 31. Приподнятие клапана 28 обеспечит выход воздуха в атмосферу из исполнительного пкевмоцилиндра и, в Конечном итоге, перемещение груза вниз, в направлении приложенного усилия.
При перемещении груза вверх в полости под мембраной 3 в результате уменьшения реакции на штоке 10 получится разрежение, что обусловит перемещение вниз мембраны 25. Перемещаясь, вниз, мембрана 25 через толкатель 27 откроет клапан 29, чем будет обеспечено поступление воздуха из сети к исполнительному пневмоцилиндру и, в конечном итоге, перемещение груза вверх.
В случае нарушения целостности мембраны 3 воздух из полости под мембраной 3 поступит в полость 7, образованнзш) мембранами 3 и 6. Через отверстие 11 и магистраль 12 он поступит в тормозной механизм t3 под мембрану 14. Фиксатор 15, жестко соединенный с мембраной 14, переместится и вступит в зацепление с одним из зубьев зубчатой рейки 18, что исключит резкое опускание вилки 16, стрелы 17, пантографа 2 и, в конечном итоге, груза 32. Формула изобретения
1.Манипулятор, содержащий ,колонну с корпусом, установленные на нем пантограф с захватом, силовой цилиндр одностороннего действия, состоящий из гильзы и разделителя сред со штоком, шарнирно связанным с пантографом, и тормозной механизм, имеющий приводной фиксатор, размещенный в корпусе с возможностью взаимодействия с рейкой, шарнирно связанной с пантографом, отличающийся тем, чТо, с целью повьш1ет ния безопасности работы при разгерметизации разделителя сред силового цилиндра, последний снабжен дополнительным разделителем сред, размещенным над основным разделителем с образованием между ними герметичной полости, пневматически связанной с приводом фиксатора.
2.Манипулятор по п. 1, отличающийся тем, что каждый раз- . делитель силового цилиндра выполнен
в виде длйнноходовой мембраны, а привод фиксатора выполнен в виде мембранного силового цилиндра.
1510257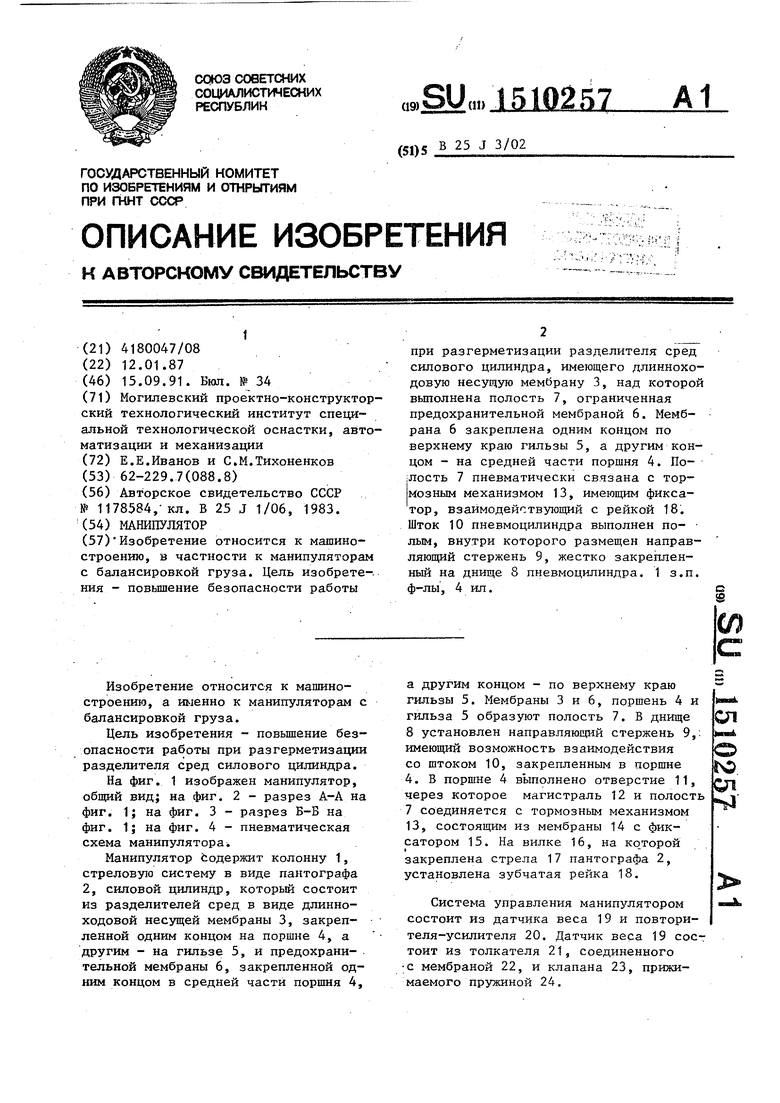
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1178584A1 |
| Сбалансированный манипулятор с ручным управлением | 1988 |
|
SU1618634A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Сбалансированный манипулятор | 1990 |
|
SU1826956A3 |
| Манипулятор с уравновешиванием груза | 1989 |
|
SU1705229A1 |
| Манипулятор | 1982 |
|
SU1148776A1 |
| ЭЛЕКТРОВОЗ ПОСТОЯННОГО ТОКА "ЭЛЕКТРОВОЗ В.С.ГРИГОРЧУКА" | 1996 |
|
RU2092346C1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
| МАШИНА ДЛЯ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ТАРЫ | 1969 |
|
SU244677A1 |
Изобретение относится к машиностроению, в частности к манипуляторам с балансировкой груза. Цель изобрете-. кия - повышение безопасности работы при разгерметизации разделителя сред силового цилиндра, имеющего длиннохо- довую несущую мембрану 3, над которой выполнена полость 7, ограниченная предохранительной мембраной 6. Мембрана 6 закреплена одним концом по верхнему краю гильзы 5, а другим концом - на средней части поршня 4. По- ;Лость 7 пневматически связана с тормозным механизмом 13, имеющим фиксатор, взаимодействующий с рейкой 18. Шток 10 пневмоцилиндра выполнен по- лым, внутри которого размещен направляющий стержень 9, жестко закрепленный на днище 8 пневмоцилиндра. 1 з.п. ф-лы, 4 ил.
J5 JZ
EB
3
77
1а1 яляяяаЛ
ФиеЛ
A-A
13
. .Z
0m пойториталл - усилитела
| Манипулятор | 1983 |
|
SU1178584A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
