Изобретение относится к манипулято рам с ручным управлением, предназначенным для механизации труда рабочего, связанного с загрузкой технологического оборудования, и может быть использовано в различных отраслях промышленности, преимущественно в машиностроении. Известен манипулятор, содержащий основание с поворотным корпусом, установленные на нем пантограф с захватом и силовой цилиндр, шток которого шарнирнр связан с пантографом 1. Недостаток известного манипулятора сострит в том, что возможны аварийные ситуации в случае срыва груза с захвата пантографа. При этом в результате наличия давления в порщневой полости силового цилиндра стрела манипулятора резко устремляется вверх. Цель изобрететия - повышение безопасности в работе. Поставленная цель достигается тем, что манипулятор, содержащий основание с поворотным корпусом, установленные на нем пантограф с захватом и силовой цилиндр, шток которого шарнирно связан с пантографом, снабжен инерционным то|шоэным механизмом, выполненным в виде стакана, шарнирно установленного на повор{угж м корпусе, и расположенных в нем и«1Шонных накладок с уолкателями, груза и стержня, причем в грузе выполнены осевоИ кайал и радиальные отверстия, в кото{шх расположены толкатели, один .конец стерж,ня выполнен с расширяющимся конуссш и установлен подпружиненио в осевом канале груз а, а другой конец шарнирно связан с пантографом. На фиг. изображен манипулятор, общий вид.; на фиг. 2 - разрез А-А нафиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2. Манипулятор состоит из основания 1, на котором с возможностью поворота вокруг вертикальной оси установлен корпус 2. Рука манипулятора выполнена в виде пантографа 3 со схватом 4 и шарнирно соеди.нена с корпусом 2 и штоком 5 силового ци-, линдра 6. Поршневая полость силового цилиндра 6 соедннена с источником с:жатого воздуха. Инерционный тормозной механизм имеет стакан 7, шарнирно установленный на корпусе 2, и расположенные в нем фрнкционные накладки 8 с толкателями 9, груз 10 и стержень П. Груз 10 выполнен с осевым каналом 12 и радиальными сквозными отверстиями, в которых расположены толкатели 9 фрикционных накладок 8, а стержень 11 подпружиненно установлен в осево канале 12 груза 10. Стержень 11 выполнен с расширяющимся конусом 13 на конце для взаимодействия с толкателями 9, другой конец которого шарнирно соединен с пантографом 3. Манипулятор работает следующим образом. После навешивания изделия на схват 4 в поршневую полость цилиндра 6 подается сжатый воздух до тех пор, пока давдение в нем не уравновесит изделие, навешанное на схват 4. Затем вручную оператор манипулирует уравновешенным изделием. При небольших скоростях перемещение навешанного изделия, а именно при его манипулировании в пределах 0,5-1,0 м/с, пружина 14 инерционного тормоза не дает возможности перемещаться стержню 11 в осевом канале 2 груза 10. При съеме изделия включается клапан снятия давления (не показан) в цилиндре 6. Если произойдет срыв изделия при его манипулировании и каитовании, то давление в поршневой полости цилиндра ,6 будет стремиться резко поднять схват 4 вверх, но в этот момент одновременно с пантографом 3 поднимается стержень 11 инерционного тормоза. При этом за счет инерции груз 10 отстает в движении относительно стержня П, при его движении вверх и через толкатели 9 воздействует на -фрикционные накладки 8, прижимая их к внутренней поверхности корпуса инерционного тормоза, тем самым притормаживает движение схвата 4 вверх. Предлагаемый манипулятор позволит автоматически ограничить максимальную скорость перемещения грузозахватного устройства при срыве груза с захватного манипулятора, что устраняет возникновение аварийных ситуаций, появляется возможиость производить указанные операции рабочими с невысокой квалификацией.
Фиг.2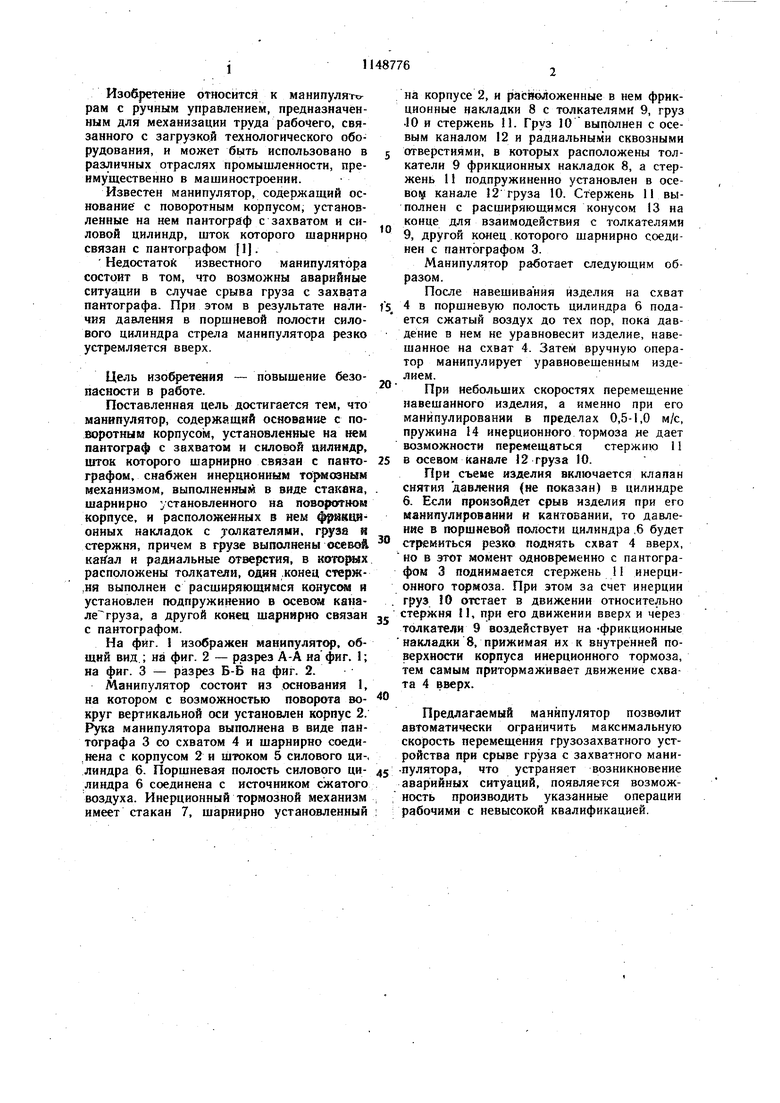
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1202861A1 |
| Манипулятор с ручным управлением | 1983 |
|
SU1129067A1 |
| Манипулятор | 1982 |
|
SU1065185A1 |
| Манипулятор | 1980 |
|
SU1118523A1 |
| Сбалансированный манипулятор с ручным управлением | 1988 |
|
SU1618634A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Манипулятор | 1987 |
|
SU1510257A1 |
| Промышленный робот | 1983 |
|
SU1127766A1 |
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
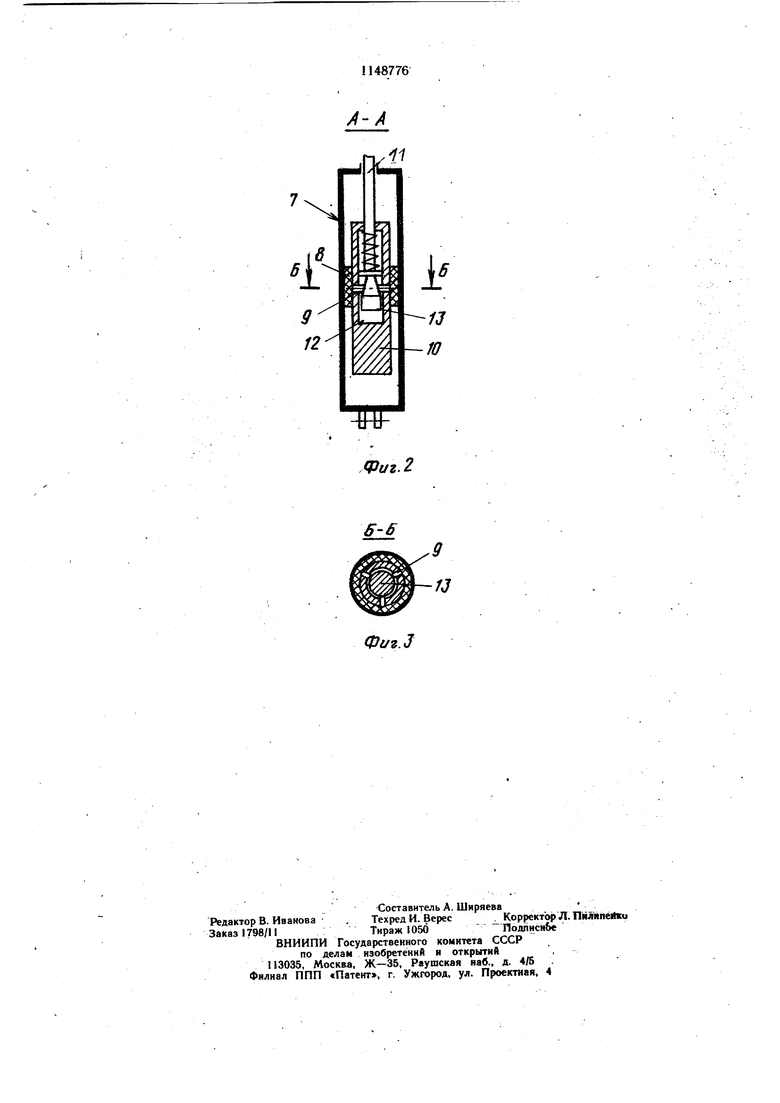
МАНИПУЛЯТОР, содержащий, основание с поворотным корпусом, установленные на нем пантограф с захватом и силовой цилиндр, шток которого шарнирно связан с пантографом, отличающийся тем, что, с целью повышения безопасности в работе, он снабжен инерционным тормозным механизмом, выполненным в виде стакана, шарнирно установленного на поворотном корпусе, и расположенных в нем фрикционных накладок с толкателями, груза н стержня, причем в грузе выполнены осевой канал и радиальные отверстия, в которых расположены толкатели, один конец стержня выполнен с расширяющимся конусом н установлен подпружинеиио в осевом канале груза, а другой конец шарнирно связан с пантографом. ® 4 С Сд
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 2948536/25-08 | |||
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
