Изобретение относится к машиностроению и может быть использовано при механизации загрузки и разгрузки в различных областях техники.
Цель изобретения - обеспечение позиционного управления манипулятором при консольном захвате груза.
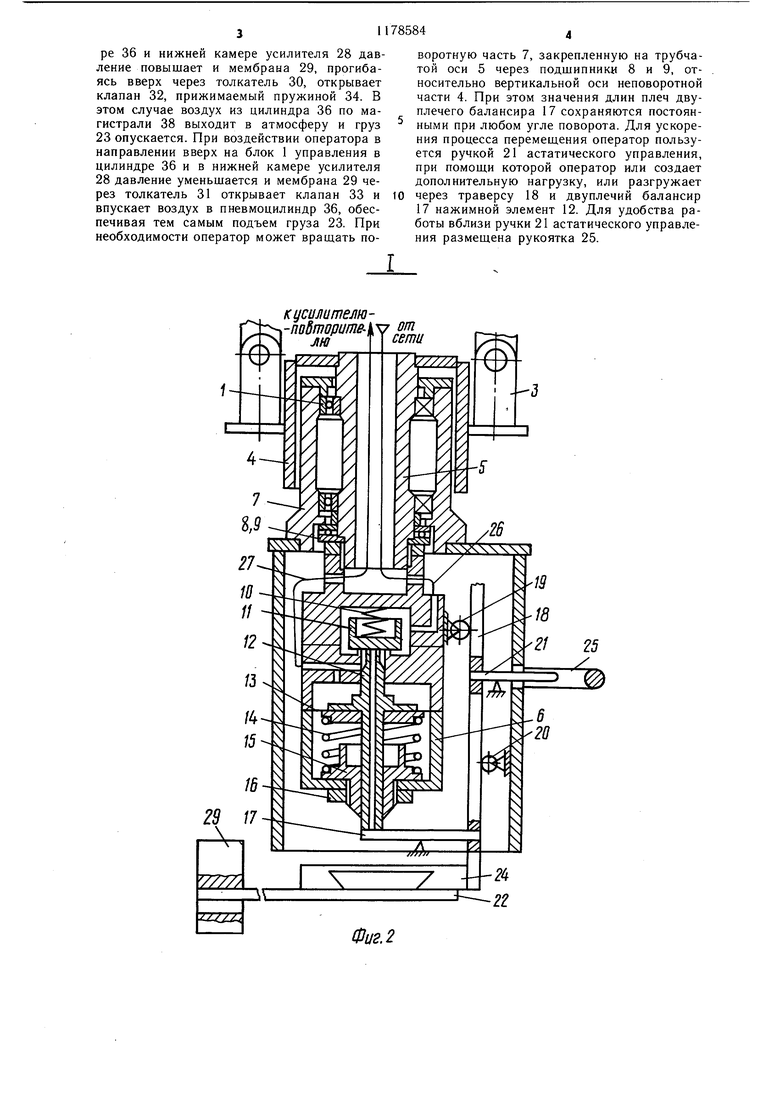
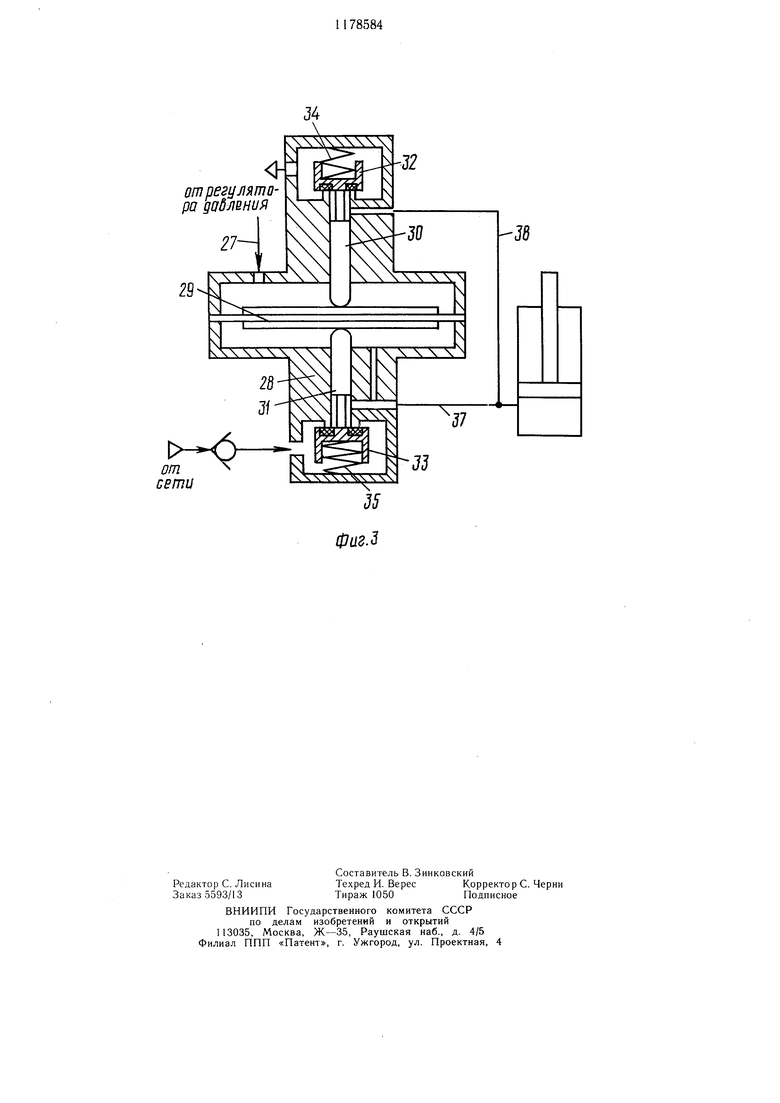
На фиг. 1 схематически показан предлагаемый манипулятор, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - усилитель системы управления манипулятором (мембранное устройство).
Манипулятор устроен следующим образом.
Блок 1 управления подвещен на рукояти 2 проущинами 3, закрепленными на неповоротной части 4. Последняя снабжена трубчатой осью 5, на которой установлен регулятор 6 давления (чувствительный элемент). Неповоротная часть 4 взаимодействует с поворотной частью 7 радиальными подщипниками 8 и упорным подщипником 9. Регулятор 6 давления содержит пружину 10, взаимодействующую с клапаном 11, в который упирается нажимной элемент 12. Последний взаимодействует с мембраной 13 и пружиной 14, упирающейся в регулировочную гайку 15, которая стопорится контргайкой 16. Нажимной элемент 12 через равноплечий рычаг 17 взаимодействует с подвижной в вертикальной плоскости траверсой 18, опирающейся на щарниры 19 и 20. Траверса 18 взаимодействует с ручкой 21 астатического управления. Грузозахватный орган 22, которым фиксируется груз 23, вставляется в унифицированное место 24 крепления, которым снабжена траверса 18. Траверса 18 с унифицированным местом 24, щаркиры 19 и 20, двуплечий балансир, ручка 21 астатического управления и рукоятка 25 установлены на поворотной части 7. Подвод сжатого воздуха осуществляется от источника питания (не показан) через магистраль 26, а через магистраль 27 управляющее давление поступает в верхнюю камеру усилителя 28, состоящего из двух камер, разделенных мембраной 29. Последняя взаимодействует с толкателями 30 и 31, которые соответственно взаимодействуют с клапанами 32 и 33, прижимаемыми Пружинами 34 и 35. Усилитель 28 соединен с силовым цилиндром 36 магистралями 38 и 37.
Манипулятор работает следующим образом.
В исходном положении клапан 11, прижимаемый пружиной 10, открыт нажимным элементом 12 вследствие усилия, создаваемого пружиной 14 и весами грузозахватного органа 22, унифицированного места 24 крепления, которым снабжена траверса 18, передаваемыми на нажимной элемент 12 через двуплечий балансир. Воздух поступает в полость по магистрали 26, ограниченную телом регулятора 6 и мембраной 13, и в верхнюю камеру усилителя 28 через магистраль 27 до тех пор, пока давление, создаваемое поступающим воздухом, воздействующее на мембрану 29, не уравновешивает силы, приложенные к нажимному элементу 12. При достижении такого давления нажимной элемент 12, связанный с мембраной 13, опускается, клапан 1 1 закрывается и подача воздуха прекращается. Воздух, поступающий в верхнюю камеру усилителя 28, создает давление, которое действует на мембрану 29, в результате чего последняя прогибается и давит на толкатель 31, который открывает клапан 33, прижимаемый пружиной 35, и впускает воздух в порщневую полость силового цилиндра 36, соединенную магистралью 37 с нижней камерой усилителя 28. Воздух поступает в силовой цилиндр 36 до тех пор, пока давление в нем не сравнивается с давлением верхней камеры, пропорциональным приложенному усилию к нажимному элементу 12. Усилие, создаваемое пружиной 14, обеспечивает создание давления, уравновешивающего массу рычажно-щарнирной системы. Регулировку усилия осуществляют вращением гайки 15, которую фиксируют контргайкой 16. Усилие от весов грузозахватного органа 22, унифицированного места 24 крепления и траверсы 18 передается на нажимной элемент 12 через двуплечий балансир 17, а момент, возникающий от консольного крепления унифицированного места 24 и грузозахвата, воспринимается шарнирами 19 и 20, по которым перемещается траверса 18. Для перемещения грузов оператор подводит блок 1 управления с грузозахватом и фиксирует на нем груз 23. Момент от консольного расположения груза воспринимается щарнирами 19 и 20, по которым под воздействием веса груза 23 перемещается траверса 18, а усилие от груза через балансир 17 воздействует на нажимной элемент 12, который открывает клапан 11 и впускает воздух в регулятор 6 давления и в верхнюю камеру усилителя 28. Воздух поступает в регулятор 6 давления до тех пор, пока созданное давление, воздействующее на мембрану 29, не уравновешивает вес груза 23, приложенный на консоли захвата. Воздух, поступающий в верхнюю камеру усилителя 28, прогибает мембрану 29, которая через толкатель 31 открывает клапан 33 и впускает воздух в цилиндвает клапан 33 и впускает воздух в цилиндр 36. Клапан 33 открыт до тех пор, пока давление в цилиндре 36 не сравнивается с давлением в верхней камере. Усилие от веса груза 23 прикладывается без искажения к нажимному элементу 12 независимо от места расположения груза 23 по всей длине консоли грузозахвата (ближе или дальше от траверсы 18). При воздействии оператора в направлении вниз на блок 1 управления, прикрепленный своей неповоротной частью 4 к рукояти 2 проушинами 3, в пневмоцилиндре 36 и нижней камере усилителя 28 давление повышает и мембрана 29, прогибаясь вверх через толкатель 30, открывает клапан 32, прижимаемый пружиной 34. В этом случае воздух из цилиндра 36 по магистрали 38 выходит в атмосферу и груз 23 опускается. При воздействии оператора в направлении вверх на блок 1 управления в цилиндре 36 и в нижней камере усилителя 28 давление уменьшается и мембрана 29 через толкатель 31 открывает клапан 33 и впускает воздух в пневмоцилиндр 36, обеспечивая тем самым подъем груза 23. При необходимости оператор может вращать поворотную часть 7, закрепленную на трубчатой оси 5 через подшипники 8 и 9, относительно вертикальной оси неповоротной части 4. При этом значения длин плеч двуплечего балансира 17 сохраняются постоянными при любом угле поворота. Для ускорения процесса перемещения оператор пользуется ручкой 21 астатического управления, при помоши которой оператор или создает дополнительную нагрузку, или разгружает
через траверсу 18 и двуплечий балансир 17 нажимной элемент 12. Для удобства работы вблизи ручки 21 астатического управления размешена рукоятка 25.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| Манипулятор | 1987 |
|
SU1510257A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Система управления уравновешивающим подъемником | 1985 |
|
SU1294755A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Манипулятор | 1985 |
|
SU1502292A2 |
| Система управления уравновешивающим подъемником | 1977 |
|
SU655638A1 |
| Манипулятор | 1986 |
|
SU1542791A2 |
| Система управления уравновешивающим подъемником | 1983 |
|
SU1221191A2 |
1. МАНИПУЛЯТОР, содержащий основание с поворотной колонной, стрелу, выполненную в виде пантографа, источник питания, силовой цилиндр, захватный орган и устройство регулирования давления в поршневой полости силового цилиндра, отличающийся тем, что, с целью обеспечения позиционного управления, он снабжен мембранным и чувствительным устройствами и траверсой, на которой расположены захватный орган и чувствительное устройство, причем мембранное устройство пневматически связано с источником питания, атмосферой и силовым цилиндром, а чувствительное устройство пневматически связано с источником питания, атмосферой и мембранным устройством и имеет подпружиненный элемент, кинематически связанный с траверсой посредством дополнительно введенного двуплечего сбалансированного рычага. 2. Манипулятор по п. 1, отличающийся тем, что он снабжен ручкой астатического управления, предназначенной для взаимодействия с траверсой.
кусилитет22
Фиг, 2
фиг.З
38
| Манипулятор | 1980 |
|
SU1118523A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
