Изобретение относится к мзхаиизации погрузочно-разгруэочных работ, а именн к приводам сбалаиснронаниых пневматических манипуляторов.
Цель изобрс т сння - повышение надежности работы г одъсмника.
На фиг. схематично изображен уравновешипа1 1и(ин пoдъfi H к; на :linr.2 - пневматическая схема системы управ- лення подъемником.
Уравновещщзающий мод/ьемник имеет выполненную в виде параллелограмма Стрелу 1 , тарнирно зяк-рсплснную на поворотной части 2 колонны 3. На продолжении MOHF uicro звена Д параллелограмма тарнирно зак рсплен корпус датчика 5 массь; с 1 :арик чм: м ноздухо- pacпpeдeлитeлe ; 6 двойного действия, рукоятко 7 управления и грузозахват- ным opranoN 3. а прстмпоположном конце стрелы 1 такрсплс.ч протиповес 9, Па iionnpo i Hiift час; / ,- :т;|;;о лс ; рс гулятор И ;;aF;J Oiiii,4 и :ларнирно С:зя
занныи со стрелои
силовой пне ВМСцилиндр 11 с клапаном 12 безопасно1 ти.
Корпус датчи1;а 5 массы имеет кп- меру Л, отделеHHyi.T с т напорной магистрали 13 и выхода ь атмосферу подпружиненным клапаном 14„ Воздух из напорной магистрали 13 поступает по магистрали 15 в камеру Б. С толкателем 16 конта1ч тирует подвс сь;п 17 рамнот о типа,, которая, свободно перемепшяс) iiji,ojib корпус; датчика . веса, возд.еГк гвуст чериз 1 олкатель 16 па мембрану 1В и кчмллан 14, Рукоятка 7 упрг1влен11я соед}П1ена с подвеской 17 с nohiri Ubio шарнира К, а с толкателем 2J. - с помощью ра Ж. Воздухораспределитель 6 ного действия жестко закреплен на корпусе датчика 5 массы и состоит из шарика 19, ; г| ; сля1оц;его магистра; 20 управления от ВЫХОДЕ; Е атмосферу и от канала 21 нхяда, соединенного с напорной маг истралыо 13, подпружи- ненног о то. 1к;гг1 я 22 и vriopnoro фланца 23.
Регулятор 10 давления имеет две камеры Б и В, разделенные мембраной 24, которая через толкатели 25 и 26
воздействует на клапаны 27
2В.
отделяющие магистраль 29 от напорной магистрали 13 и ныхода в атмосферу через дроссель 30,
Система управления защищена от перегрузки предохранительным клапаном 31, а от аварийного падения груза в случае повреждения любого воздухопровода - клапаном 12 безопасности, имеющим камеру Г и мембрану 32 воздействующую через толкатель 33 на подпругнхиненный запорнь Й элемент 34, отделяющий камеру Д силового пневмоцилиндра 11 от магистрали 29.
В исходном положении пневмомагист- pa.iHi перекрыть клапанами, а рукоятка.
15 20 7управления удерживается в нейтральном положении подпру/киненным толкателем 22. При нагрул;ении грузозах- органа 8 последний через подвеску 17 перемещает мембрану 18
и то;и атель 16 вниз и открывает клапан 14, Воздух из магистрали 13 поступает в камеру Л и по магистрали 15-11 самеру Б стабилизатора 10 давления, прогибает мембрану 2ч и толкателем 23 от. клапан 27, гтС Слс; чего из магистрали 13 поступает в камеру В, ьыгистраль 29
:- Ь открывает клапан 34 i-i проходит в рабочую полость Д силового пневмоци- линдр.ч 1 1 . При дост;|;к; Ни 1 в камере Л давления, создающего на мембрану 18 усилие, необходимое для уравноло веу ивания массы груза и грузозахватг ного органа 8, мембра {а 18 занимает нейтральное положение и клапан 14 закрывается. При достижении равенства давления в камерах Б и В клапан 27
„(- ; акже закрывается. Таким образом в камере Д ппевмогиишндра 1 1 создается давление; необходимое для уравнове.- щивгпгия массы груза i- равное давле1шю в камере А,
U )
Для подъема грузозахватного органа
8с грузом или без груза оператор поднимает вверх рукоятку 7. При этом толкатель 22 и шарик 19, контактируя
5 с корпусом датчи1са 3 масс-гл, создают жетский упор для рукоятки 7, которая, поворачиваясь вокруг шарнира Ж, пере- меи;ает вниз подвеску 17 и через толкатель 16 открывает клапан 14. Воздух
0 из напорной магистрали 13 по магистрали 15 поступает в камеру Б, проги-. бает мембрану 24 и через толкатель 25 открывает клапан 27, после чего воздух из магистрали 13 поступает
5 в магистраль 29 и через клапан 34
в камеру Д силового пневмоцилиндра 11, Происходит подъем груза. Чтобы прекратить подъем, оператору достаточно установить рукоятку 7 в нейтральное
положение, при котором все клапаны закрываются,
Для опускания груза оператор нажимает на рукоятку 7. При этом рукоятка 7, поворачиваясь вокруг шарнира Е, перемещает вниз толкатель 22, шарик 19 перекрывает выход в атмосферу и открьгаает проход воздуха из напорной магистрали 13 через канал 21 и магистраль 29 управления и камеру Г клапана 12 безопасности, в результате чего мембрана 32, прогибаясь, толкателем 33 открывает клапан 34. При дальнейшем перемещении вниз рукоятки 7 шарнирно связанньш с ней толкатель 22 упирается во фланец 23, а рукоятка 7, поворачиваясь тепе уже вокруг шарнира Ж, начинает перемещать вверх подвеску 17. Мембрана 18, прогибаясь вверх, открывает выхо воздуха из камеры А в атмосферу. Воздух из камеры Б через магистраль 15 и камеру А также выходит в атмосферу. Давление в камере Б снижается, мембрана 24, прогибаясь вверх, толкателем 26 открывает клапан 28, и воздух из камеры Д пневмоцилиндра 11 через открытые клапаны 34 и 28 и дроссель 30 выходит в атмосферу. Происходит плавное опускание груза.
При установке рукоятки 7 в нейтральное положение толкатель 22 под действием пружины поднимается вверх и шарик 19 перекрывает канал 21, а к
меру Г клапана 12 безопасности через магистраль 20 соединяют с атмосферой, в результате чего клапан 34 закрывает выход воздуха из камеры Д пнев- мощшиндра 11 . Опускание груза прекращается.
Формула изобретения
Система управления уравновещиваю- щим подъемником, содержащая исполнительный пневмоцилиндр с рабочей по
5
0
лостью, регулятор давления, связанный с напорной магистралью, сообщенный с последней своей подклапанной полостью датчик массы и закрепленную одним концом на ролике грузовой подвески рукоятку управления подъемом груза, отличающаяся тем, что, с целью повышения надежности работы, она снабжена смонтированным г. на исполнительном пневмоцилиндре клапаном безопасности, включающим в себя, установленные в корпусе подпружиненный запорный элемент, мембрану, смон-г тированную в корпусе с образованием камеры управления, и связанный с мембраной толкатель, размещенный в корпусе с возможностью взаимодействия с указанным запорным элементом, и смонтированным в нижней части датчика массы воздухораспределителем, включающим в себя установленные в корпусе, выполненном с клапаном, эа- порньш элемент и размещенный под ним с возможностью взаимодействия с ним своим верхним концом толкатель, на нижнем конце которого шарнирно закреплена своей средней частью рукоятка управления подъемом груза, упо0 мянутый конец которой шарнирно закреплен на рамке грузовой подвески, при этом полость воздухораспределителя, в которой размещен толкатель, со-- общена с атмосферой, а клапанная полость - с полостью управления клапана безопасности, причем подклапанная полость датчика массы сообщена с клапанной полостью воздухораспределителя с возможностью ее перекрытия запорным элементом последнего, а рабочая полость исполнительного пневмоцилиндра сообщена с подклапанной полостью клапана безопасности, которая сообщена с возможностью перекрытия
5 запорным элементом последнего с регулятором давления.
5
5
0
S
Фиг.
f-i-K
11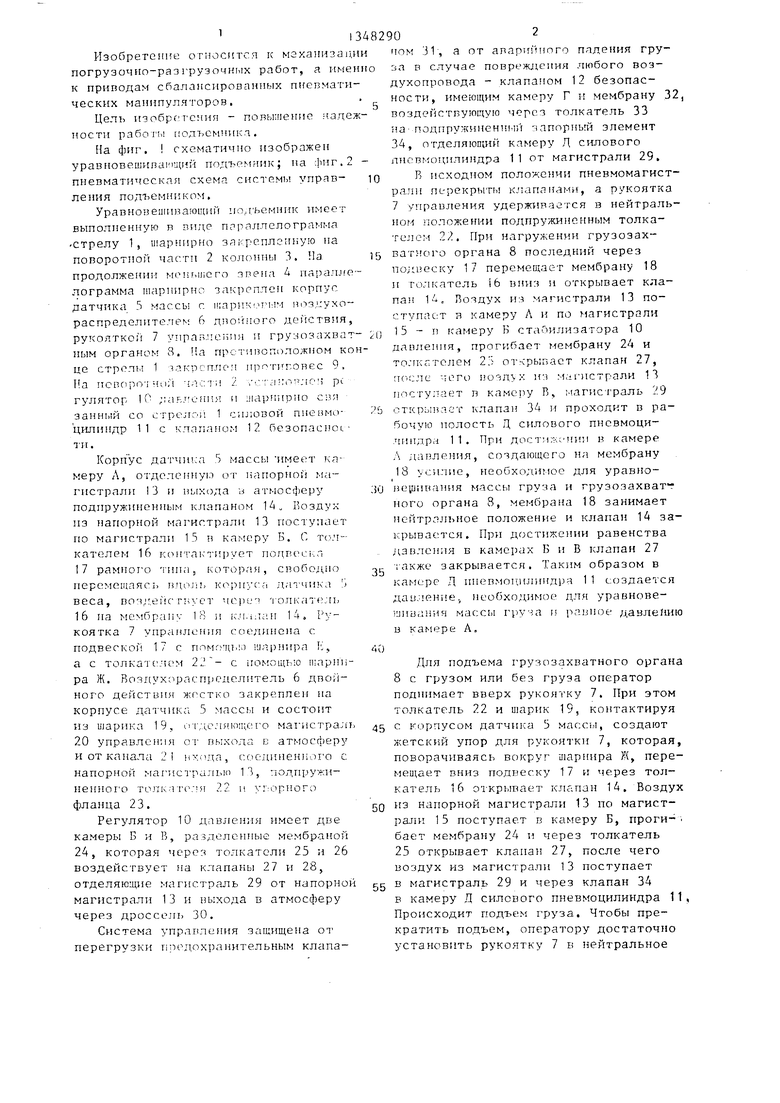
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1985 |
|
SU1294755A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Устройство для управления пневматическим уравновешивающим стреловым подъемником | 1984 |
|
SU1328279A1 |
| Система управления уравновешивающим подъемником | 1983 |
|
SU1221191A2 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Устройство для управления уравновешивающим стреловым подъемником | 1988 |
|
SU1650561A1 |
| Тормозной привод прицепа | 1990 |
|
SU1781108A1 |
| ГИДРОЗАМОК | 1992 |
|
RU2016272C1 |
Изобретение относится к подъемно- транспортному машиностроению. Цель изобретения - повьшение безопасности, надежности и стабильности работы. Система управления содержит исполнительный пневмоцилиндр 11, регулятор 10 давления, связанный с напорной магистралью 13, датчик 5 массы, клапан безопасности, воздухораспределитель 6, смонтированный в нижней части датчика массы. Использование в системе управления клапана безопасности, открывающего выход воздуха из рабочей полости пневмоцилиндра 11, предотвращает аварийное падение груза, а последовательное включение в работу сначала клапана безопасности, а затем клапана регулятора Ш давления, соединяющего рабочую полость пневмоцилиндра 11 с атмосферой, повьппает надежность работы системы. 2 ил. с 2S. 2а 1L S сл 00 4; 00 N9 ;о Фиг. г
Редактор М, Петрова
Составитель В. Преображенская
Техред Л.Олийнык Корректор И. Муска
Заказ 5162/21Тираж 720Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
. ™ -- - - -- ------- - - - -- - - - -- -- - - - - ---- - - - - -- - - - - -
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
