о
оо о со
Јъ
Изобретение относится к области машиностроения, а именно к сбалансированным манипуляторам с ручным управлением.
Цель изобретения - расширение технологических возможностей путем обеспечения возможности манипулирования при приложении усилия оператора непосредственно к объекту манипулирования о
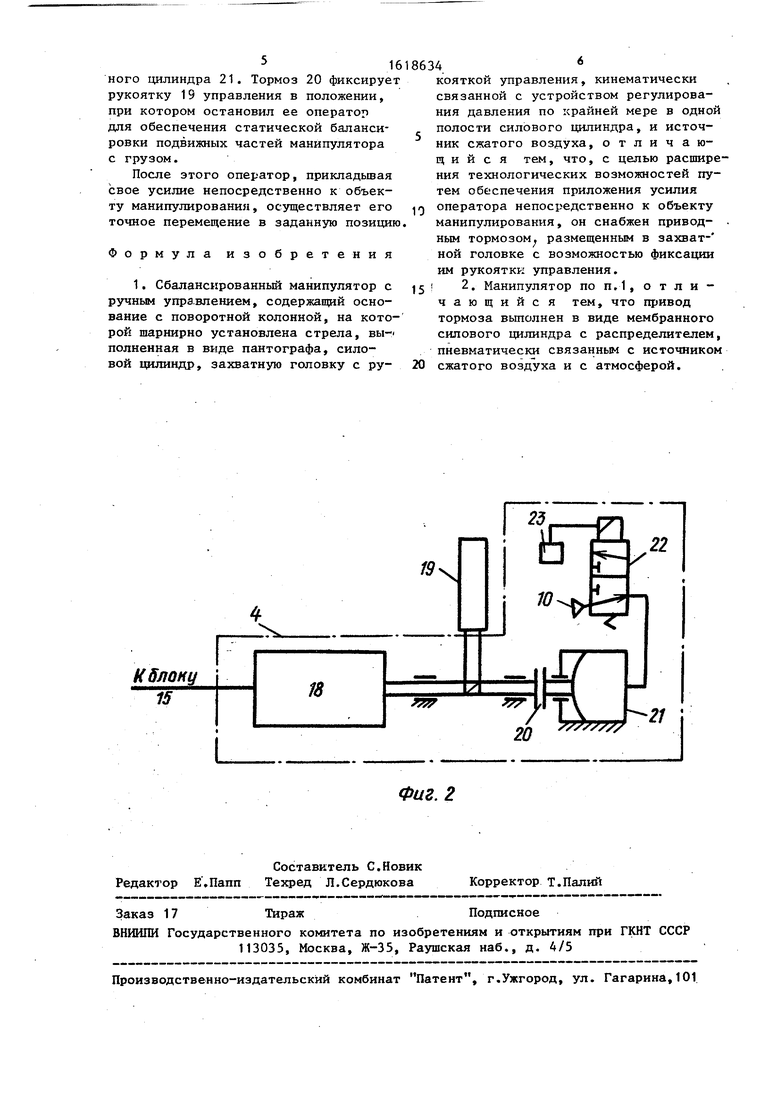
На фиг.1 изображена схема манипулятора; на фиг.2 - схема захватной головки.
Сбалансированный манипулятор с ручным управлением содержит основание 1, на котором с возможностью поворота установлена поворотная колонна 2.Исполнительный орган выполнен,например, в виде пантографа 3 с захватной головкой 4, который шарнир но связан со штоком 5 силового цилиндра 6 двухстороннего действия и горизонтальными направляющими 7 поворотной ко - лонны 2. Штоковая 8 и поршневая 9 полости силового цилиндра 6 подключены к источнику 10 сжатого воздуха через устройство регулирования давления, имеющее редукционные клапаны 11 и 12 с пропорциональным управлением. Управляющие элементы соответственно 13 и 14 клапанов 11 и 12 электрически подключены к выходу блока 15 управления, включающего диф-«- ференциальный повторитель 16 и усилитель 17 мощности. Вход блока 15 электрически связан с выходом задат- чика 18 положения, , установленного на корпусе захватной головки 4, Задат чик 18 положения выполнен, например, в виде потенциометра и связан с рукояткой 19 управления. В захватной головке 4 установлен тормоз 20 с приводом в виде мембранного силового цилиндра 21 с распределителем 22, управляемым от коммутатора 23.:
Манипулятор работает следующим образом
В исходном состоянии при отсутствии управления со стороны оператора рукоятка 19 управления находится в среднем положении и зафиксирована с помощью тормоза 20, сигнал, вырабатываемый задатчиком 18 положения равен нулю. В дифференциальном пов- торителе .16 вырабатываются некоторые начальные уровни напряжения, которые через усилитель 17 мощности подаются соответственно на управляющие элементы 13 и 14 редукционных клапанов 11 и 12, которые формируют начальные уровни давления,позволяющие создать усилие на силовом цилиндре 6. обеспечивающее уравновешивание веса механизма пантографа 3 и захватной головки 4. Оператор, удерживая рукоятку 19 управления, легко перемеQ щает захватную головку 4 с крюком 24 к грузу и осуществляет его захват. Далее оператор с помощью коммутатора 23 выдает сигнал управления на ,; пневматический распределитель 22, ко5 торый срабатывает и соединяет рабочую полость силового цилиндра 21 тормоза 20 с атмосферой, тем самым расфикси- рует рукоятку 19 управления, которую перемещает, например, вверх. При этом
Q задатчик 18 положения вырабатывает сигнал управления, пропорциональный величине смещения рукоятки 19 относительно исходного положения. Сигнал рассогласования поступает на вход
5 повторителя 16, где вырабатываются дифференциальные сигналы, которые че- j рез усилитель 17 мощности поступают , jна органы 13 и 14 электрического управления соответственно редукционо ных клапанов 11 и 12 и формируют соответствующие уровни давления в полостях 8 и 9 силового цилиндра 6. Таким образом, при смещении рукоятки 19 управления вверх давление в што5 ковой полости 8 цилиндра 6 падает, а в поршневой Я возрастает. На штоке цилиндра создается усилие, необходимое для перемещения подвижных частей манипулятора с грузом. При перемеще0 нии рукоятки 19 управления с определенной скоростью пневматический привод обеспечивает перемещение объекта манипулирования с той же скоростью. При подходе груза к точке пози5 ционирования оператор, продолжая удерживать рукоятку 19 управления, перестает ее перемещать. При этом давление, формируемое клапаном 11, увеличивается, и на цилиндре 6 обQ разуется требуемое усилие, обеспечивающее остановку манипулятора и удержание груза. При движении вниз система работает аналогично.
Для манипулирования грузом, непосредственно прикладывая к нему
5
свое усилие, оператор переключает :коммутатор 23, срабатывает распределитель 22, который подключает источ- . ник сжатого.воздуха к полости мембранного цилиндра 21. Тормоз 20 фиксирует рукоятку 19 управления в положении, при котором остановил ее оператор для обеспечения статической балансировки подвижных частей манипулятора с грузом.
После этого оператор, прикладывая свое усилие непосредственно к объекту манипулирования, осуществляет его точное перемещение в заданную позицию
Формула изобретения
1. Сбалансированный манипулятор с ручным управлением, содержащий основание с поворотной колонной, на которой шарнирно установлена стрела, вы- полненная в виде пантографа, силовой цилиндр, захватную головку с ру1618634
кояткой управления, кинематически связанной с устройством регулирования давления по крайней мере в одной полости силового цилиндра, и источник сжатого воздуха, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения приложения усилия
оператора непосредственно к объекту манипулирования, он снабжен приводным тормозом размещенным в захват- ной головке с возможностью фиксации им рукоятки управления.
2. Манипулятор по п.1.отличающийся тем, что привод тормоза выполнен в виде мембранного силового цилиндра с распределителем, пневматически связанным с источником
сжатого воздуха и с атмосферой.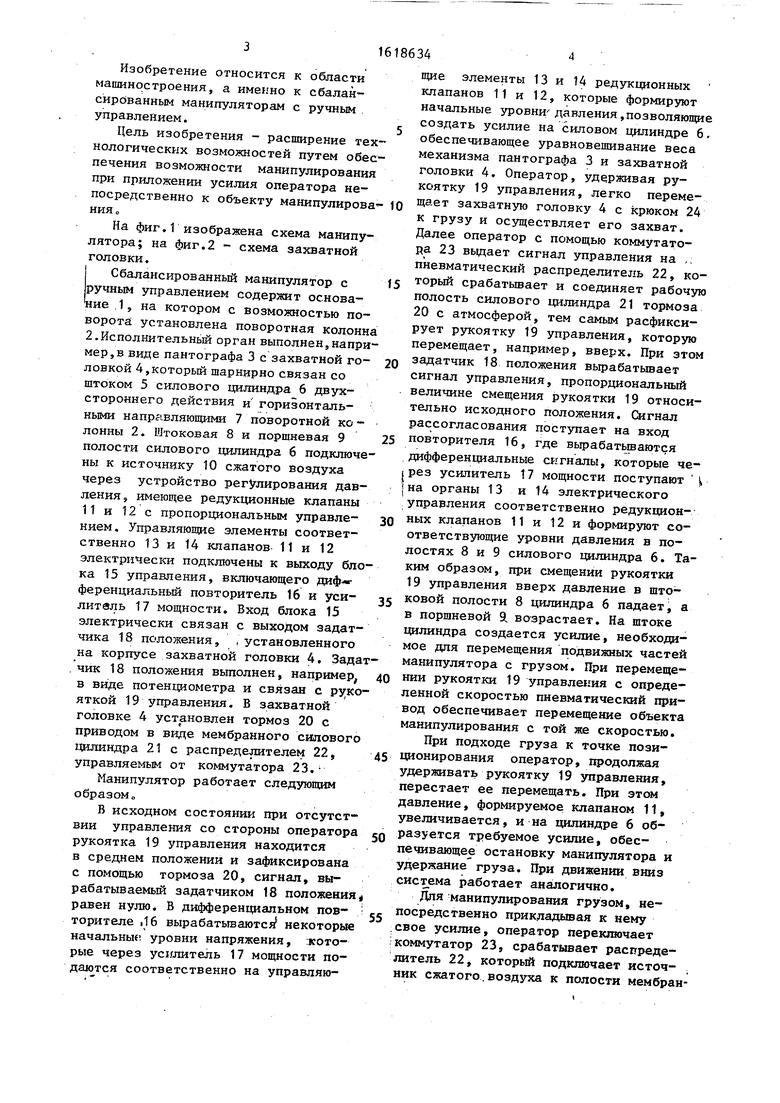
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор с ручным управлением | 1985 |
|
SU1315288A1 |
| Манипулятор | 1987 |
|
SU1510257A1 |
| Манипулятор | 1982 |
|
SU1148776A1 |
| Манипулятор | 1983 |
|
SU1178584A1 |
| Манипулятор с ручным управлением | 1983 |
|
SU1129067A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| Устройство управления блокировкой дифференциала транспортного средства | 1984 |
|
SU1162630A1 |
| Манипулятор | 1980 |
|
SU1118523A1 |
| ПЕРЕДВИЖНАЯ РЕМОНТНАЯ МАСТЕРСКАЯ | 2001 |
|
RU2210512C2 |
Изобретение относится к машиностроению. Цель изобретения - расширение технологических возможностей путем обеспечения возможности манипулирования объектом с непосредственным приложением к нему усилия оператора. При перемещении рукоятки 19 управления, например, вверх эадат- чик дает сигнал на повторитель 16 и далее через усилитель 17 на органы ; 13,14 электроуправления редукционными клапанами 11, 12, которые настраивают требуемые уровни давления для статической балансировки механических частей манипулятора и груза, подвешиваемого на крюк 24 захватной головки 4. Затем оператор дает команду на фиксацию рукоятки 19 управления в заданг ном положении с помощью тормоза, размещенного в захватной головке 4. Тем самым обеспечивается возможность путем непосредственного прикладывания усилия оператора к объему манипулирования точно перемещать его в ; заданную позицию. 1 з.п.ф-лы, 2 ил.: (/
Г
19
N
20
xyvvx/w
Я
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
