Известны автоматические регуляторы направленного действия проходческого .комбайна в вертикальной плоскости, содержащие гидравлическую систему управления положением,рабочего органа с бортовыми фрезами.
Предлагаемый автоматический регулятор отличается от известных тем, что в качестве чувствительного элемента регулятора, измеряющего отклонения проходческого комбайна от заданной траектории в нем применен двухпозиционный релейный элемент-шариковый уровень, работающий в автоколебательном режиме. Такое выполнение регулятора, обеспечивает непрерывное воздействие на регулирование движением комбайна относительно заданной траектории.
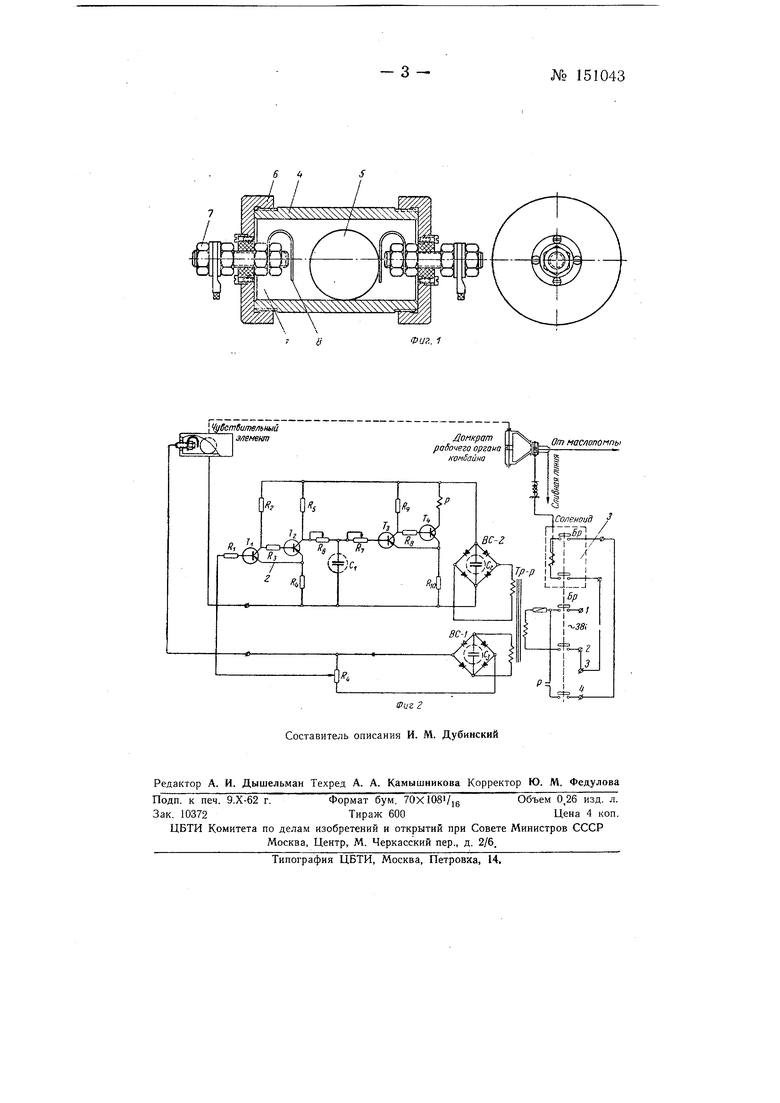
На фиг. 1 изображен шариковый уровень; на фиг. 2 - электрическая схема регулятора.
Принцип работы автоматического регулятора заключается в автоматической стабилизации исполнительного органа комбайна, несущего бермовые фрезы, под определенным углом к горизонту, при этом продольная ось получающейся выработки наклонена под таким же углом к горизонту.
Регулятор состоит из трех основных узлов: датчика (щарикового уровйя) / угла наклона направления с отсчетным (задающим) устройством, релейного усилителя 2 и соленоида 3.
Датчик угла наклона представляет собой щариковый уровень, который реагирует на отклонения исполнительного органа комбайна от заданного направления в вертикальной плоскости.
Шариковый уровень состоит из металлического цилиндрического корпуса 4, внутренняя поверхность которого термически обработана и отщлифована, металлического шара 5 и торцовых крышек 6 с изолированными латунными проходными шпильками 7 с пружинящими контактами 8.
№ 151043- 2 -
Электрическая цепь, на которую должен воздействовать шариковый уровень, подводится к корпусу, уровня и одному из его торцовых контактов. При изменении угла «аклона уровня металлический шар перемещается и замыкает, либо размыкает выходную электрическую цепь. В работе всегда находится только один торцовый контакт, а второй является резервным. Расчетная чувствительность шарикового уровня составляет ± 4,36-10 раб. Шариковый уровень вместе -с отсчетным устройством, позволяющим устанавливать заданные углы с точность Г, крепится на исполнительном органе проходческого комбайна.
Релейный усилитель предназначен для усиления сигнала, снимаемого с шарикового уровня. Вход релейного усилителя искробезопасен.
Релейный усилитель собран на 4 полупроводниковых триодах П13. Усилитель заключен во взрывобезопасный корпус.
Соленоидный прИБод воздействует на золотник гидросистемы комбайна, который в свою очередь,,, воздействуя на домкраты подъема и опускания исполнительного органа, поддерживает его под заданным углом. Соленоидный привод заключен во взрывобезопасную оболочку и соединен с золотником подъема режущей части тягой.
В качестве рабочего режима данного регулятора принят автоколебательный режим, что достигается выбором в качестве чувствительного звена двухпозиционного релейного элемента (шарикового уровня).
Параметры автоколебаний (частоту и амплитуду) можно изменять переменныдми сопротивлениями и в схеме релейного усилителя, которые изменяют время срабатывания выходного реле Р усилителя.
Изменяя параметры автоколебаний, можно обеспечить любое малое отклонение среднего значения действительного профиля выработки от заданного.
Предмет изобретения
Автоматический регулятор направленного действия проходческого комбайна в вертикальной плоскости, включающий гидравлическую систему управления положением рабочего органа с бортовыми фрезами, отличающийся тем, что, с целью обеспечения непрерывного воздействия на регулирование движением комбайна относительно заданной траектории, в качестве чувствительного элемента регулятора, измеряющего отклонения проходческого комбайна от заданной траектории, применен двухпозиционный релейный элемент -щариковый уровень, работающий в автоколебательном режиме.
Фиг. 1

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С АВТОКОЛЕБАТЕЛЬНЫМ ПРИВОДОМ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ | 2010 |
|
RU2435131C1 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| Исполнительный механизм системы автоматического управления горных машин | 1983 |
|
SU1120101A1 |
| СПОСОБ АВТОРЕГУЛИРОВАНИЯ СО СБРОСОМ УПРЕЖДАЮЩЕГО ВОЗДЕЙСТВИЯ ПО ВТОРОЙ ПРОИЗВОДНОЙ | 1995 |
|
RU2105340C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |