гв
Фиг.
Г7 2S
35
Фиг.
Г7 2S
35
Изобретение относится к технологии машиностроения, а более конкретно, к обработке внутренней поверхности глубоких отверстий при помощи устройств, базирующихся на обработанную поверхность и перемещающихся по ней.
Цель изобретения - повышение точности механической обработки и рас- щирение технологических возможностей агрегата.
Указанная цель достигается благодаря автономному размещению агрегата внутри обрабатываемого отверстия и возможности стабилизации требуемого положения его оси.
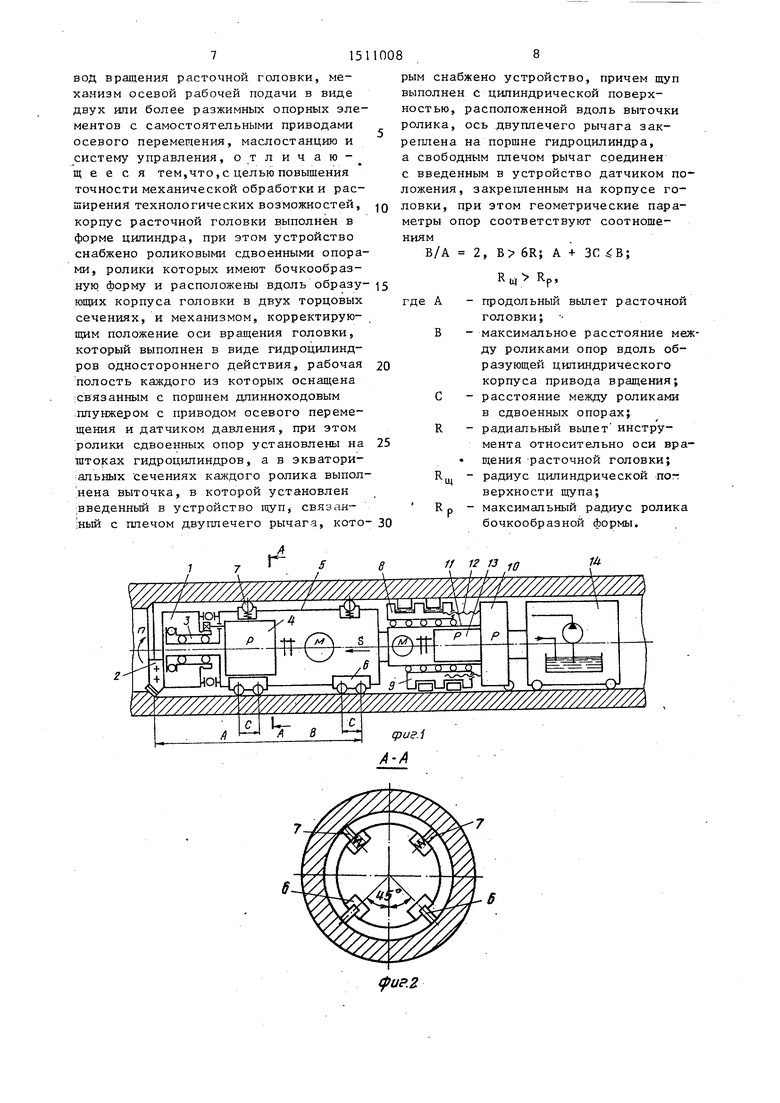
На фиг.1 изображен агрегат для обработки глубоких отверстий; на- фиг.2 - разрез А-А на фиг.1; на фиг.З - схема, базирования агрегата в продольном сечении корпуса привода вращения расточной головки ; на фиг. А конструкция сдвоенной роликовой опоры.
Устройство для обработки глубоких отверстий состоит из расточной головки 1 с инструментом 2, расположенной на выходном валу 3, привода- вращения 4, корпуса цилиндрического |5, в котором размещены четыре сдвоенные роликовые опоры 6, расположенные попарно вдоль двух образующих корпу- |са 5, и четыре упруго-подвижные одиночные роликовые опоры 7, механизма осевой рабочей подачи агрегата, который состоит из двух групп разжимных опорных элементов 8 и -9, каждая из которых состоит как минимум из двух опорных элементов, кинематически связанных между собой через распределительный редуктор 10, и имеет возможность перемещаться относительно корпуса 11 при помощи ходовых винтов 12, вращение которых осуществляется приводом 13 через редуктор 10, маслостанции 14, питающей гидросистему устройства.
Конструкция сдвоенной роликовой опоры содержит корпус 15, имеющий две замкнутые гидравлические полос- ти 16 и 17, заполненные гидрожидкост или гидропластом и оснащенные поршнями 18 и 19, длинноходовыми плунжерами 20 и 2 1 с приводами их осевого перемещения 22 и 23, датчиками положения 24 и 25. На поршнях 18, 19 размещены ролики 26 и 27 бочкообразной формы, имеющие в экваториальном
0
5
0
5
0
сечении выточку дпя размещения в ней . щупа 28 и-29, соединенного через двуплечий рычаг 30 с злектроконтактны- ми датчиками давления 31, 32. Датчики 31, 32 размещены на корпусе 15, а ось 33iдвуплечевого рычага 30 соединена с поршнями 18, 19. Злектрокон- тактные датчики 31 и 32 включены в цепь питания приводов 22 и 23 осевого перемещения длинноходовых плунжеров 20 и 21. Чувствительные тензо- манометры (датчики) 24 и 25 включены в цепь питания приводов 22, 23 осевого перемещения длинноходовых плунжеров 20, 21, а также через сравнивающее устройство 34 соединены между собой. Радиус цилиндрической поверхности щупа 28, 29 больше радиуса ролика.
Устройство начинает обработку отверстия из заходной шахты - образцового высокоточного цилиндра диаметром, равным номинальному диаметру обработки, или из предварительно расточенного зaзioднoгo участка отверстия. Механизм осевой рабочей подачи за счет периодического взаимодействия разжимных опорных элементов 8 и 9 с поверхностью отверстия осуществляет непрерывное перемещение устройства по отверстию со скоростью рабочей подачи. Упруго-подвижные одиночные роликовые опоры 7 создают натяг 5 между сдвоенными роликовыми опорами ( 6 и поверхностью отверстия и тем самым ориентируют ось вращения расточной головки 1, Вращающаяся расточная головка 1 инструментом 2 осуществляет растачивание отверстия, устройство при обработке полностью располагается внутри канала, соединяясь с пультом управления лишь при помощи кабеля, и может обрабатывать отверстия сколь угодно большой длины, многократно- превьш ающей длину самого агрегата,
Опорные точки сдвоенных роликовых опор 6 осуществляют пространственную ориентацию режущего инструмента относительно обработанной поверхности детали.
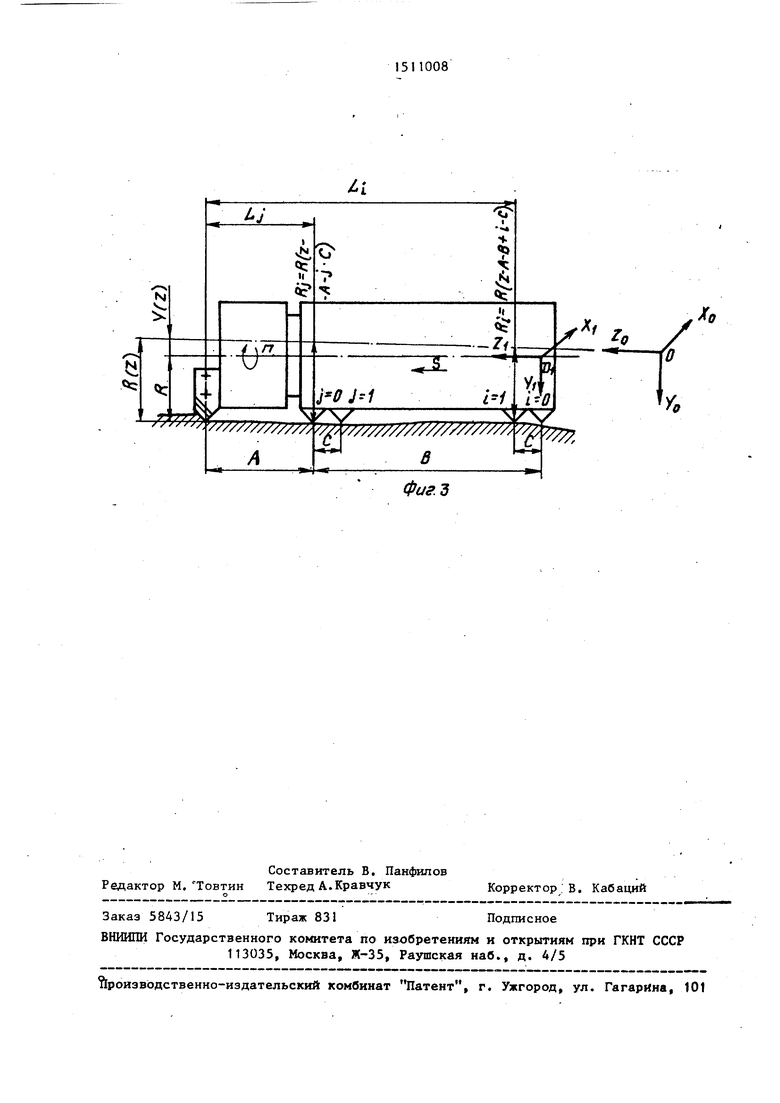
Схема базирования устройства содержит по четыре опорные точки в каждой из двух взаимно перпендикулярных продольных сечениях корпуса 5 привода вращения.
Обозначения, принятые в расчетной схеме: А - .продольный вылет расточ-
0
5
0
5
ной головки над передней опорой; Б - мвксимальное расстояние между роликами опор вдоль базирующей цилиндрического корпуса привода вращения; С - расстояние между роликами в сдвоенных опорах; R - радиальный вылет инструмента относительно оси вращения расточной головки; S (Xg, система координат обрабатываемой де- IQ тали, причем ось OZ направлена вдоль заданной оси отверстия; S(X, Y, , 7о) - система координат агрегата; причем ось направлена вдоль г;си вращения расточной голов- t5 ки; R(2) функция радиуса обработанной поверхности в системе координат Y(2) функция непрямолинейности оси обработанного отверстия в системе координат-YoOZ о; R К(2-л-/сГ мгновенное значение функции R(j в точке, отстоящей от плоскости вращения инструмента на величину 1- j А + jC; R , R(2.-/(-e- fc) мгновенное зна„V
32,
20
При движении устройства 34 в равлении S ролики 26 и 27 катят по поверхности канала и в случае возникновения уступа 35 щуп 29 п наезжает на уступ 35 (так как и замыкает контакты датчика рьй включает привод 23 осевого п мещения длинноходового ппунжера что заставляет поршень 19 вместе роликом 27 подниматься вверх до пор,пока датчик 32 не разомкнетс Это произойдет тогда, когда конт ные точки щупа 29 и ролика 27 бу находиться на одной поверхности. подъеме ролика 27 вся радиальная нагрузка N будет приходиться на лик 26 N N. При полном наезде ка 27 на уступ 35 радиальная наг ка будет перераспределена между ликами 26 и 27 N N 1 + N.
При движении агрегата в напра нии S в случае возникновения вп ны 36 на поверхности канала по м
чение функции R(2.)S точке, отстоящей 25 опускания щупа 28 во впадину 36
от плоскости вращения инструмента на величину Lj А + В - iC; j - О; I - нумерация опорных точек в переднем базирующем элементе; I - нумерация опорных точек в заднем базирующем элементе (нумерация производится со стороны внешних опорных точек, как показано на фиг.З).
С учетом принятых обозначений из фиг.З очевидно
Y
30
электроконтактный датчик 31 буде включать привод 22 осевого перем щения длинноходового ппунжера на опускание поршня 18 с роликом 26 до тех пор, пока контактные п верхности щупа 28 и ролика 26 не окажутся на одной поверхности. П перемещении ролика 26 радиальная нагрузка N будет приходиться на
35
лик 27 N
N
2 а при полном спус
(2) (г)
(1)
ролика 26 во впадину 36 нагрузка .перераспределится так, что N + N.
Функция R (2)определяется значениями
J
и R; ИЗ соотношения
(2)- 1
J -1- , Li - Lj
которое после подстановки ся в
R
следующее уравнение:
(zf (г-fl-e + ic) (R(2-A-jcr
в -C(i )
Геометрические параметры схемы базирования соответствуют соотношениям:о
В/А 2;
А
+ ЗСЙ, (3)
При этом работа сдвоенной роликовой опоры осуществляется следующим обра- зом.
5
)
32, кото0
При движении устройства 34 в направлении S ролики 26 и 27 катятся по поверхности канала и в случае возникновения уступа 35 щуп 29 первым наезжает на уступ 35 (так как и замыкает контакты датчика рьй включает привод 23 осевого перемещения длинноходового ппунжера 21, что заставляет поршень 19 вместе с роликом 27 подниматься вверх до тех пор,пока датчик 32 не разомкнется. Это произойдет тогда, когда контакт- ные точки щупа 29 и ролика 27 будут находиться на одной поверхности. При подъеме ролика 27 вся радиальная нагрузка N будет приходиться на ролик 26 N N. При полном наезде ролика 27 на уступ 35 радиальная нагрузка будет перераспределена между роликами 26 и 27 N N 1 + N.
При движении агрегата в направлении S в случае возникновения впадины 36 на поверхности канала по мере
опускания щупа 28 во впадину 36
электроконтактный датчик 31 будет включать привод 22 осевого перемещения длинноходового ппунжера 20 на опускание поршня 18 с роликом 26 до тех пор, пока контактные поверхности щупа 28 и ролика 26 не окажутся на одной поверхности. При перемещении ролика 26 радиальная нагрузка N будет приходиться на ро35
лик 27 N
N
2 а при полном спуске
ролика 26 во впадину 36 нагрузка .перераспределится так, что N N + + N.
Значительная разница в диаметрах
40 плунжеров 20 и 21 и порщней 18 и 19 позволяет преобразовать больгаие линейные перемещения плунжеров 20 и 21 в малые перемещения поршней 18, 19, что подьшает чувствительность систе-
45 мь1 и точность отслеживания.
В том случае, когда датчики 31 и 32 не осуществляют включение приводов 22 и 23 чувствительные тензомано- метры 24 и 25, соединенные между
50 собой через сравнивающее устройство 34, осуществляют выравнивание ради- ; альных усилий на роликах 26 и 27 так, что55
бы N, N.
Формула изобретения
Устройство для обработки глубоких отверстий в невращающихся деталях, содержащее расточную головку, при
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЛИННОХОДОВОЙ СТАНОК - КАЧАЛКА | 2014 |
|
RU2581256C2 |
| Устройство для ориентации втулок при сборке | 1977 |
|
SU722725A1 |
| Револьверная головка | 1991 |
|
SU1814992A1 |
| МАГИСТРАЛЬНЫЙ НЕФТЯНОЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ И СПОСОБ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК АГРЕГАТА | 2011 |
|
RU2484305C1 |
| СПОСОБ ОБРАБОТКИ РАБОЧЕЙ ПОВЕРХНОСТИ ГОЛОВКИ РЕЛЬСА НА РЕЛЬСОФРЕЗЕРНОМ СТАНКЕ И РЕЛЬСОФРЕЗЕРНЫЙ СТАНОК | 2001 |
|
RU2201318C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЖИДКОСТИ ИЗ СКВАЖИН | 1999 |
|
RU2150608C1 |
| УСТАНОВКА ДЛЯ ПОДЪЕМА ЖИДКОСТИ ИЗ СКВАЖИНЫ, СПОСОБ ЕЕ РАБОТЫ, СКВАЖИННЫЙ НАСОС И ГИДРОПРИВОД, ВХОДЯЩИЕ В ЕЕ СОСТАВ | 1997 |
|
RU2111343C1 |
| ГОРИЗОНТАЛЬНАЯ МНОГОСТУПЕНЧАТАЯ СЕКЦИОННАЯ ЦЕНТРОБЕЖНАЯ НАСОСНАЯ УСТАНОВКА И СПОСОБ СБОРКИ НАСОСНОЙ УСТАНОВКИ | 2013 |
|
RU2529979C1 |
| РАСТОЧНАЯ ГОЛОВКА | 2006 |
|
RU2314181C1 |
| Металлорежущий станок для обработки отверстия ступицы железнодорожных колес | 2023 |
|
RU2809883C1 |
Изобретение относится к технологии машиностроения, а более конкретно к обработке внутренней поверхности глубоких отверстий при помощи устройств, базирующихся на обработанную поверхность и перемещающихся по ней. Цель изобретения - повышение точности механической обработки и расширение технологических возможностей агрегата за счет автономного размещения устройства внутри обрабатываемого отверстия и возможности стабилизации требуемого положения его оси. При движении устройства в направлении S1 базирующие ролики 26 и 27 катятся по поверхности отверстия и в случае возникновения уступа 35 щуп 29 первым наезжает на него и замыкает контакты датчика давления 32, который включает привод 23 плунжера 21, что заставляет поршень 19 вместе с роликом 27 подниматься до тех пор, пока не сработает датчик 32. Это возможно, когда точки контакта щупа 29 и ролика 27 будут находиться в одной плоскости, при этом радиальная нагрузка будет приходиться на ролик 26 (N=N1). При полном наезде ролика 27 на уступ 35 радиальная нагрузка будет перераспределена между роликами 26 и 27, т.е.N=N1+N2, что позволяет стабилизировать усилие на каждую сдвоенную роликовую опору и поддержать N1=N2, а это уменьшает отклонение оси устройства при появлении возмущающего воздействия от резания. 4 ил.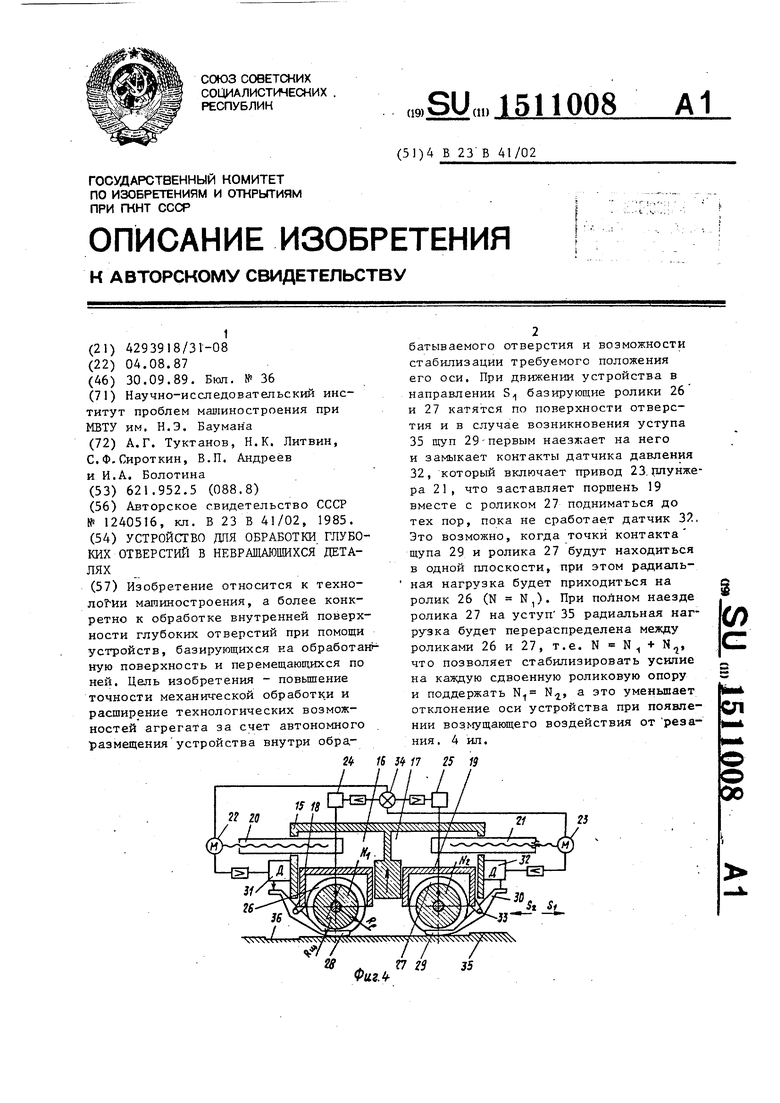
.Z
Фиг.Ъ
| Устройство для обработки глубоких отверстий | 1985 |
|
SU1240516A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
