/J.
д 8 а 12 10
АЛ
/ / /
2/
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный автомат для сборки узлов | 1978 |
|
SU747685A1 |
| Способ сборки деталей | 1987 |
|
SU1523296A1 |
| Устройство для установки пружинных контактов в гнезда колодки соединителя | 1990 |
|
SU1725303A1 |
| Автомат для сборки предохранителей | 1975 |
|
SU564664A1 |
| Устройство для сборки игольчатых подшипников | 1979 |
|
SU865592A1 |
| Устройство для сборки насадной части автоматического медицинского шприца | 1976 |
|
SU613876A1 |
| Устройство для ориентации деталей | 1979 |
|
SU856744A1 |
| Устройство для сборки | 1985 |
|
SU1337226A1 |
| Устройство для сборки деталей типа вал-втулка | 1990 |
|
SU1780980A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
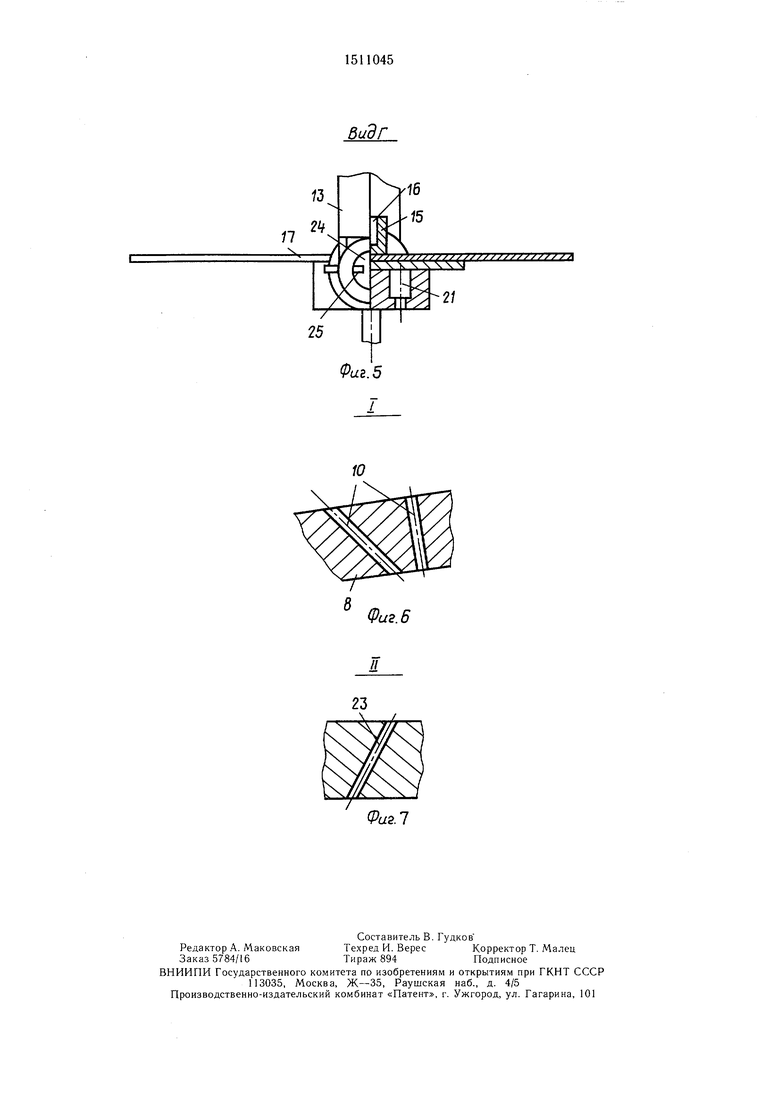
Изобретение относится к машиностроению и расширяет технологические возможности за счет подачи деталей на сборку в ориентированном положении и сообщении одной из них поискового движения. При вращении пневмокамеры 4 и подаче сжатого воздуха через сопла 10 втулки 3 перемещаются к центру пневмокамеры и переворачиваются в гнезде 9. Благодаря этому втулки опираются на поверхность 8 своей стороной с наименьшей площадью. Под действием центробежной силы втулки перемещаются к бурту 11 и западают в окна 12. При совмещении окон 12 с окнами 14 в корпусе 1 втулки попадают в каналы 13 и опускаются до упора 25. Одновременно валы 6 подаются в лоток 15 и при его вращении западают в пазы, выполненные в дне лотка. При остановке лотка 15 валы 6 проваливаются в каналы 19. Далее под действием сжатого воздуха, истекающего из сопла 20, валы подаются в механизм 7 сборки, где получают поисковое вихревое движение. Благодаря этому вал 6 сопрягается со втулкой 3, а затем раздвигает упоры 25 и попадает в отводной канал 24. 7 ил.
±
Ш
СП
4 СЛ
6 18 15 1
/ I
Г
Изобретение относится к технологическому оборудованию и может быть использовано в машиностроении.
Целью изобретения является расширение технологических возможностей за счет подачи деталей на сборку в ориентированном положении и сообш,ения одной из них поискового движения.
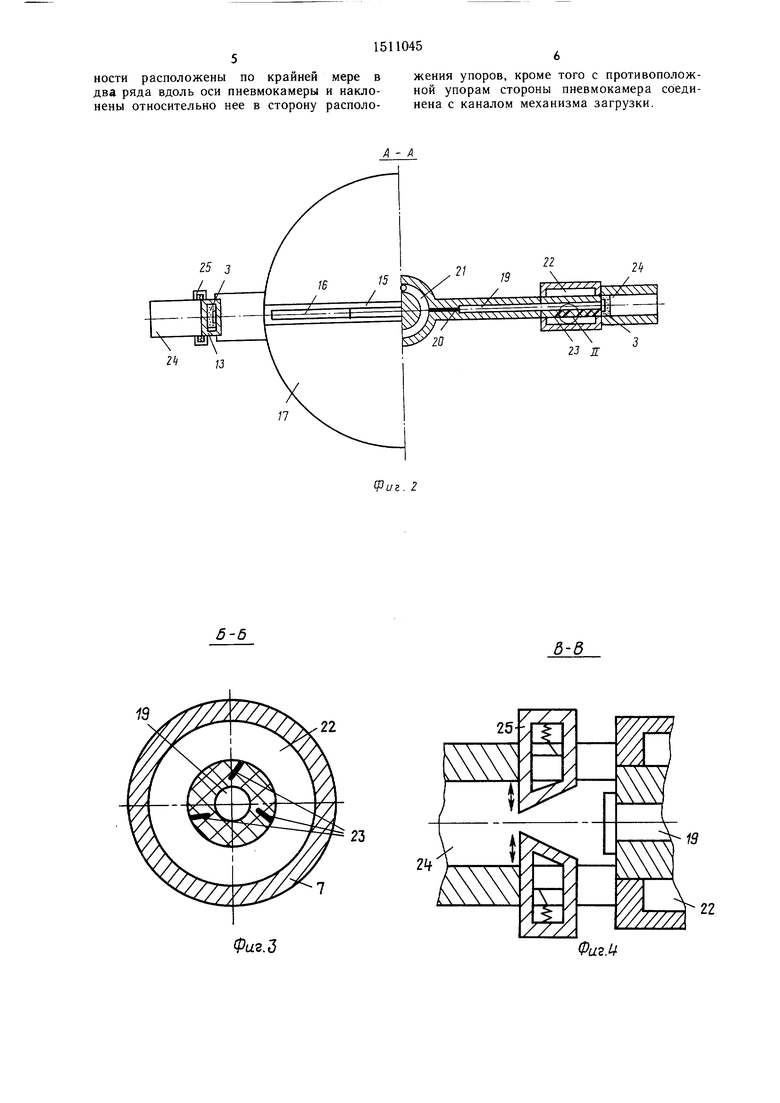
На фиг. I изображено описываемое устройство, обший вид; на фиг. 2 - разрез
каются на поверхность 8 своей неразвитой поверхностью. Под действием центробежной силы втулки 3 перемешаются к бурту 11, поднимаются по нему и западают в окна 12. При совпадении окон 12 и 14 втулки 3 в ориентированном положении попадают в каналы 13 и опускаются по ним до упоров 25. Одновременно с втулками 3 валы 6 подаются в лоток 15, при периодическом которого под действиА-А на фиг. 1; на фиг. 3 - разрез 0 ем центробежной силы валы 6 смеш,аются Б-Б на фиг. 1; на фиг. 4 - разрез В-В на от центра лотка 15 и проваливаются в пазы 16. При остановке лотка 15 пазы 16 совмешаются с пазами 18 в пластине 17,
валы 6 проваливаются в каналы 19. Под
фиг. 1; на фиг. 5 - вид по стрелке Г на фиг. 1; на фиг. 6 - узел I на фиг. 1; на фиг. 7 - узел II на фиг. 2.
Устройство для автоматической сборки 15 действием сжатого воздуха, истекаюшего из содержит корпус 1, механизм 2 ориентации сопла 20, вал 6 перемешается в механизм деталей типа втулки 3 в виде пневмока- 7 сборки, где ему сообщаются поисковые меры 4, механизм 5 загрузки деталей перемещения благодаря сжатому воздуху, типа вала 6 и диаметрально располо- истекающему из сопл 23. При попадании в женные механизмы 7 сборки. Пневмока- отверстие втулки 3 на вал 6 своей тор- мера 4 снабжена приводом вращения (не 20 цовой поверхностью раздвигает упоры 25 и показан), а ее рабочая поверхность 8 вы- собранный узел перемещается в отводной полнена конической и снабжена гнездом 9, диаметр которого меньше наружного диаметра втулок 3. Поверхность 8 перфорирована равномерно расположенными соплами 25 10, причем часть сопл 10, расположенных от оси поверхности 8 до ее середины, выполнены наклонными к ней, а остальные - перпендикулярными. На периферии поверхности 8 выполнен бурт 11 с равномерно расположенными окнами 12. На корпу- 30 с расположенным в его центре гнездом, се 1 выполнены диаметрально расположен- причем на рабочей поверхности выполнены ные каналы 13, имеющие в верхней части окна 14, равные по величине окнам 12. Механизм 5 загрузки выполнен в виде лотка 15 с пазами 16, приводом вращения
(не показан) и неподвижной пластины 17 35 тации механизмами загрузки и сборки, ра- с диаметрально расположенными пазами 18, бочая поверхность механизма ориентации под которыми в корпусе 1 выполнены каналы 19, связанные с помощью сопл 20 с пневмокамерой 21. При этом ширина пазов 16, 18 и каналов 19 одинакова.
Механизм 7 сборки выполнен в виде кольцевой пневмокамеры 22, внутренняя поверхность которой соединена с каналом 19 и снабжена тангенциальными наклонно расположенными соплами 23. В отводном канале 24, соединенном с каналом 13, разме- 45 де имеющего возможность поворота лотка щены подпружиненные упоры 25.со сквозными пазами в его дне, пневмоУстройство работает следующим образом.
Втулки 3 подаются на поверхность 8 вращающейся пневмокамеры 4 произвольно ори- -ентированными. Сжатый воздух, истекающий
из сопл 10, создает воздущную проклад- 50 того, механизмы сборки расположены ди- ку лишь под теми втулками 3, которые аметрально противоположно и выполнены ориентированы своей наиболее развитой стороной вниз. В этом случае втулки 3 соскальзывают к центру поверхности 8 и частично западают в гнездо 9. Поскольку диканал 24.
Формула изобретения
Устройство для автоматической сборки, содержащее установленный в корпусе механизм ориентации, рабочая поверхность которого выполнена в виде обратного конуса
равномерно расположенные сопла, отличающееся тем, что, с целью расщирения технологических возможностей, устройство снабжено размещенными под механизмом ориенснабжена буртом с окнами, а корпус снабжен диаметрально расположенными вертикальными каналами с окнами, равными по величине и находящимися на одном уровне с окнами в упомянутом бурте, при этом сопла на рабочей поверхности механизма ориентации от центра до середины выполнены наклонными в сторону его оси поворота, а механизм загрузки выполнен в викамеры с соплами и диаметрально расположенных каналов, связанных с пневмокамерой с помощью указанных сопл, причем ширина пазов и каналов одинакова, кроме
аметр гнезда 9 меньше диаметра втулок 3, то они не проваливаются в гнездо 9, а под действием сжатого воздуха, истекающего из наклонных сопл 10, опрокидываются и опус55
каждый в виде кольцевой пневмокамеры, внутренняя поверхность которой снабжена тангенциально расположенными соплами, и упоров, расположенных напротив друг друга в вертикальных каналах корпуса и подпружиненных относительно него, причем упоры лежат в одной плоскости с осью пневмокамеры, а сопла на ее внутренней поверхкаются на поверхность 8 своей неразвитой поверхностью. Под действием центробежной силы втулки 3 перемешаются к бурту 11, поднимаются по нему и западают в окна 12. При совпадении окон 12 и 14 втулки 3 в ориентированном положении попадают в каналы 13 и опускаются по ним до упоров 25. Одновременно с втулками 3 валы 6 подаются в лоток 15, при периодическом которого под действием центробежной силы валы 6 смеш,аются от центра лотка 15 и проваливаются в пазы 16. При остановке лотка 15 пазы 16 совмешаются с пазами 18 в пластине 17,
валы 6 проваливаются в каналы 19. Под
действием сжатого воздуха, истекаюшего из сопла 20, вал 6 перемешается в механизм 7 сборки, где ему сообщаются поисковые перемещения благодаря сжатому воздуху, истекающему из сопл 23. При попадании в отверстие втулки 3 на вал 6 своей тор- цовой поверхностью раздвигает упоры 25 и собранный узел перемещается в отводной с расположенным в его центре гнездом, причем на рабочей поверхности выполнены
действием сопла 20, 7 сборки, перемещен истекающе отверстие цовой пове собранный с располо причем на
канал 24.
действием сжатого воздуха, истекаюшего из сопла 20, вал 6 перемешается в механизм 7 сборки, где ему сообщаются поисковые перемещения благодаря сжатому воздуху, истекающему из сопл 23. При попадании в отверстие втулки 3 на вал 6 своей тор- цовой поверхностью раздвигает упоры 25 и собранный узел перемещается в отводной с расположенным в его центре гнездом, причем на рабочей поверхности выполнены
Формула изобретения
Устройство для автоматической сборки, содержащее установленный в корпусе механизм ориентации, рабочая поверхность которого выполнена в виде обратного конуса
ействием сжатого воздуха, истекаюшего из опла 20, вал 6 перемешается в механизм сборки, где ему сообщаются поисковые еремещения благодаря сжатому воздуху, стекающему из сопл 23. При попадании в тверстие втулки 3 на вал 6 своей тор- овой поверхностью раздвигает упоры 25 и обранный узел перемещается в отводной с расположенным в его центре гнездом, причем на рабочей поверхности выполнены
тации механизмами загрузки и сборки, ра- бочая поверхность механизма ориентации
равномерно расположенные сопла, отличающееся тем, что, с целью расщирения технологических возможностей, устройство снабжено размещенными под механизмом ориентации механизмами загрузки и сборки, ра- бочая поверхность механизма ориентации
де имеющего возможность поворота лотка со сквозными пазами в его дне, пневмоснабжена буртом с окнами, а корпус снабжен диаметрально расположенными вертикальными каналами с окнами, равными по величине и находящимися на одном уровне с окнами в упомянутом бурте, при этом сопла на рабочей поверхности механизма ориентации от центра до середины выполнены наклонными в сторону его оси поворота, а механизм загрузки выполнен в витого, механизмы сборки расположены ди- аметрально противоположно и выполнены
камеры с соплами и диаметрально расположенных каналов, связанных с пневмокамерой с помощью указанных сопл, причем ширина пазов и каналов одинакова, кроме
того, механизмы сборки расположены ди- аметрально противоположно и выполнены
каждый в виде кольцевой пневмокамеры, внутренняя поверхность которой снабжена тангенциально расположенными соплами, и упоров, расположенных напротив друг друга в вертикальных каналах корпуса и подпружиненных относительно него, причем упоры лежат в одной плоскости с осью пневмокамеры, а сопла на ее внутренней поверхности расположены по крайней мере в два ряда вдоль оси пневмокамеры и наклонены относительно нее в сторону располо19
22
Фа.З
жения упоров, кроме того с противоположной упорам стороны пневмокамера соединена с каналом механизма загрузки.
2
фуг. 2
Фа.14
Фиг. 6
23
/
Фиг.7
| Устройство для сборки | 1985 |
|
SU1337226A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
