(Л
СП
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1357220A1 |
| Захват промышленного робота | 1987 |
|
SU1451004A1 |
| Захват манипулятора | 1987 |
|
SU1511115A1 |
| СООСНЫЙ РЕДУКТОР | 2013 |
|
RU2529943C1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| Манипулятор | 1987 |
|
SU1465301A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1161370A2 |
| Привод протеза руки | 1979 |
|
SU825064A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
Изобретение относится к машиностроению, в частности к механизмам робототехнических устройств. Цель изобретения - повышение быстродействия за счет обеспечения одновременного согласованного перемещения звеньев исполнительного устройства. Исполнительное устройство шарнирно установлено на основании 1 своим входным звеном 4. Звенья 5, 6 и 7 исполнительного устройства соединены друг с другом шарнирами, образованными их скошенными торцами. Основные валы 17, 18, 19, 20 шарнирно установлены на этих звеньях и соединены друг с другом посредством сферических муфт. При включении двигателя 2 привода водило 10 планетарного редуктора получает вращение, а сателлит 9 совершает прецессионное движение, образуя зацепление с входным центральным колесом 12 и выходными центральными колесами 14, 15, которые вращаются в противоположные стороны. Жестко соединенные с выходными центральными колесами дополнительный и основной валы также вращаются в противоположные стороны. При включении механизмов 21, 22, 23 или 24 связи звеньев с валами, выполненных, например, в виде колодочных муфт, соответствующие звенья исполнительного устройства получают движение. Для включения в работу захватного устройства используется механизм 26 связи, образующий винтовую передачу с валом 25. При этом происходит изменение конфигурации исполнительного устройства за счет одновременного или поочередного движения его звеньев, а также выполняются необходимые манипуляции с объектом, зафиксированным губками захватного устройства. 1 з.п. ф-лы, 5ил.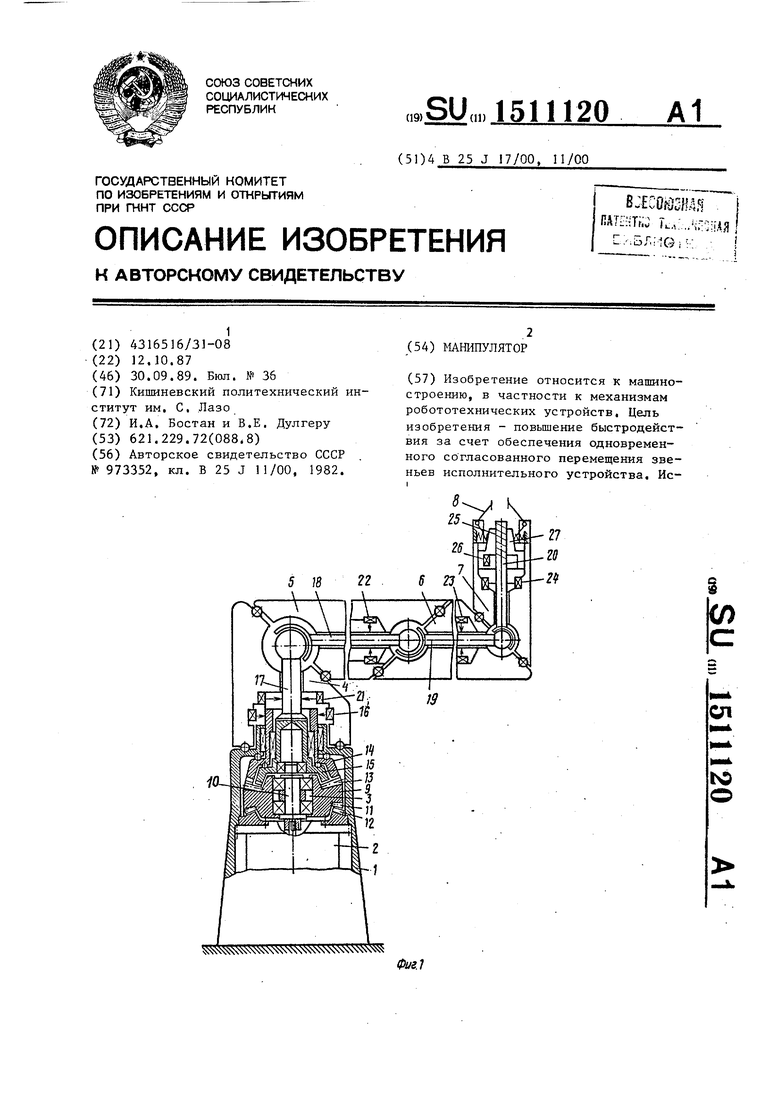
Фиг.
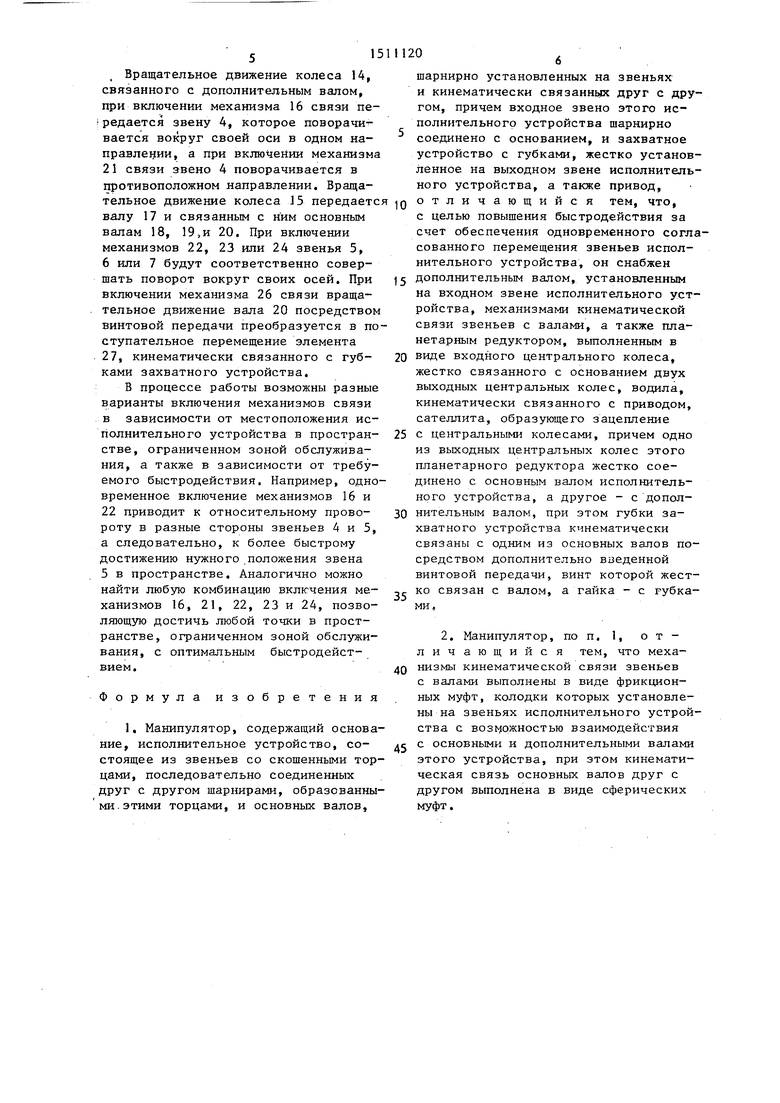
полнительное устройство шарнирно установлено на основании 1 своим входным звеном 4. Звенья 5, 6 и 7 исполнительного устройства соединены друг с другом шарнирами, образованными их скошенными торцами. Основные валы 17, 18, 19, 20 шарнирно установлены на этих звеньях и соединены друг с другом посредством сферических муфт. При включении двигателя 2 привода водило 10 планетарного редуктора получает вращение, а сателлит 9 совершает прецессионное движение, образуя зацепление с входным центральным колесом 12 и выходными центральными колесами 14, 15, которые вращаются в противоположные стороны. Жестко соединенные с выходными центральными
Изобретение относится к машиностроению, в частности к промьшшенным роботам.
Цель изобретения - повышение быстродействия за счет обеспечения одновременного согласованного перемеще- ния звеньев исполнительного устройства.. ,
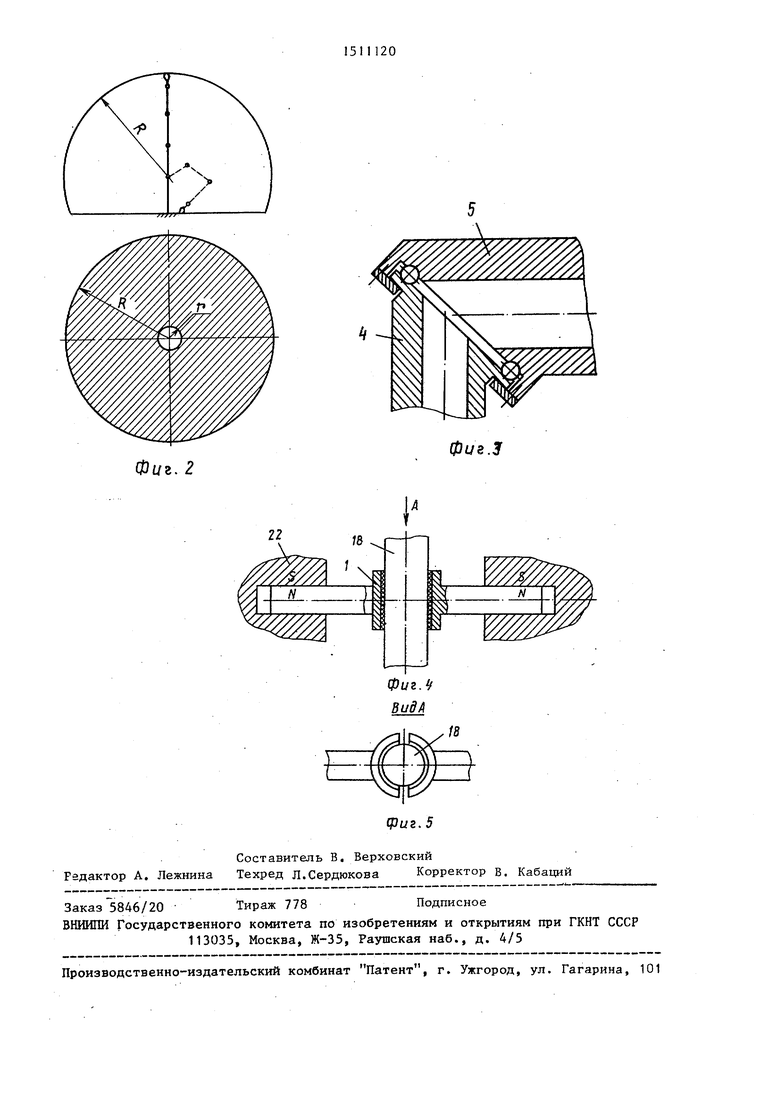
На фиг. 1 показан манипулятор; на фиг, 2 - зона обслуживания; на фиг, 3 - устройство шарнира соединения звеньев исполнительного устройства; на фиг, 4 - конструкция коло- дочной муфты; на фиг. 5 - вид А на фиг, 4,
Манипулятор включает стойку 1, в которой размещены двигатель 2 привода и планетарньй редуктор 3, звень 4-7 исполнительного устройства и захватное устройство 8, Редуктор 3 содержит сателлитный блок 9 колес, который установлен на водиле 10 и включает зубчатый венец 11, зацепляющийся с неподвижным входным центральным колесом 12, и венец 13, за- цепляющийся с двумя выходными центральными зубчатыми колесами 14 и 15, Колесо 14 связано посредством механизма 16 связи со звеном 4, Колесо 15 связано с валом 17, Манипулятор включает также валы 18-20, связанные с валом I7 и между собой посредством сферических муфт. Звенья 4-7 могут быть связаны соответственно с валами
колесами дополнительный и основнбй валы также вращаются в противоположные стороны. При включении механизмов 21, 22, 23 или 24 связи звеньев с валами, вьшолненных, например, в виде колодочных муфт, соответствующие звенья исполнительного устройства получают движение, Дпя включения в рабо0 ту захватного устройства используется механизм 26 связи, образующий винтовую передачу с валом 25. При этом происходит изменение конфигурации исполнительного устройства за счет од5 новременного или поочередного движения его звеньев, а также выполняются необходимые манипуляции с объектом, зафиксированным губками захватного устройств а, 1 з.п, ф-лы , 5 ил.
17-20 посредством механизмов 21-24 связи. На валу 20 выполнена винтовая канавка 25, образующая с механизмом 26 связи винтовую передачу, посредством которой производится осевое перемещение элемента 27, связанного с захватными устройствами. Механизмы связи с валами могут быть выполнены в виде электромагнитных муфт, якори которых с помощью колодочных тормозов охватывают валы звеньев.
Манипулятор работает следующим образом.
При включении электродвигателя 2 привода сателлитный блок 9 колес совершает прецессионное движение, зацепляясь при этом с одной стороны с неподвижным центральным колесом 12, ас другой - с двумя вращающимися колесами 14 и 15, При этом колесо 14 будет вращаться с редукцией
Z 1 Z 14.
li 2 ,j -Z j, Z 4
a колесо 15 - с редукцией
i -..,,.. , Z j Zij-Z ,Z 5
где - числа зубьев венцов 11 и 13;
fl w 1 зубьев центральных колес 12, 14 и 15. Передаточные отношения i и i примерно одинаковы по величине, однако имеют разные знаки, т,е. зубчатые колеса J4 и 15 вращаются в разные стороны.
Вращательное движение колеса 14, связанного с дополнительным валом, при включении механизма 16 связи пе- редается звену 4, которое поворачи- вается вокруг своей оси в одном направлении, а при включении механизма
21связи звено 4 поворачивается в противоположном направлении. Вращательное движение колеса 15 передаетс валу 17 и связанным с ним основным валам 18, 19,и 20. При включении механизмов 22, 23 или 24 звенья 5,
6 или 7 будут соответственно совершать поворот вокруг своих осей. При включении механизма 26 связи вращательное движение вала 20 посредством винтовой передачи преобразуется в поступательное перемещение элемента 27, кинематически связанного с губками захватного устройства.
В процессе работы возможны разные варианты включения механизмов связи в зависимости от местоположения исполнительного устройства в пространстве, ограниченном зоной обслуживания, а также в зависимости от требуемого быстродействия. Например, одновременное включение механизмов 16 и
22приводит к относительному прово- роту в разные стороны звеньев 4 и 5, а следовательно, к более быстрому достижению нужного положения звена
5 в пространстве. Аналогично можно найти любую комбинацию включения механизмов 16, 21, 22, 23 и 24, позволяющую достичь любой точки в пространстве, ограниченном зоной обслуживания, с оптимальным быстродействием.
Формула изобретения
1, Манипулятор, содержащий основание, исполнительное устройство, состоящее из звеньев со скошенными торцами, последовательно соединенных друг с другом шарнирами, образованными, этими торцами, и основных валов.
шарнирно установленных на звеньях и кинематически связанных друг с другом, причем входное звено этого исполнительного устройства шарнирно соединено с основанием, и захватное устройство с губками, жестко установленное на выходном звене исполнительного устройства, а также привод,
отличающийся тем, что, с целью повышения быстродействия за счет обеспечения одновременного согласованного перемещения звеньев исполнительного устройства, он снабжен
дополнительным валом, установленным на входном звене исполнительного устройства, механизмами кинематической связи звеньев с валами, а также планетарным редуктором, выполненным в
виде входного центрального колеса, жестко связанного с основанием двух выходных центральных колес, водила, кинематически связанного с приводом, сателлита, образующего зацепление
с центральными колесами, причем одно из выходных центральных колес этого планетарного редуктора жестко соединено с основным валом исполнительного устройства, а другое - с дополнительным валом, при этом губки захватного устройства кинематически связаны с одним из основных валов посредством дополнительно введенной винтовой передачи, винт которой жестко связан с валом, а гайка - с губка
ми.
с основными и дополнительными валами этого устройства, при этом кинематическая связь основных валов друг с другом выполнена в виде сферических муфт.
Фиг. 2
22
Фи.З
| Авторское свидетельство СССР | |||
| Исполнительный орган манипулятора | 1979 |
|
SU973352A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
