.-
135 Изобретение относится к машиностроению, в частности к промышленным Роботам и манипуляторам.
Целью изобретения является повышение точности позиционирования за счет уменьшения материалоемкости манипулятора.
На чертеже изображен манипулятор, общий вид.
Манипулятор содержит основание 1 и установленный на нем посредством., шариков 2 корпус 3 механической руки .манипулятора. Механическая рука несет исполнительный орган 4, размещенный с возможностью продольного, перемеще ния и ротации в корпусе 3 механической руки с механизмами его продольного перемещения и ротации, и схват 5 с механизмом перемещения его зажимных элементов 6. Механизм перемещения зажимных элементов 6 выполнен в виде тросика 7, связывающего между собой подпружиненные зажимные элементы 6, шариков 8 и электромагнита 9.
Привод поворота механической рукь включает двигатель 10, установленный на корпусе 3 механической руки, и прецессионную Передачу, сателлитное зубчатое колесо 11 которой связано с выходным валом двигателя 10 и выполнено в виде двух дисков 12 и 13 с наклонными торцами, угол наклона которых равен углу прецессии сател- литного зубчатого колеса 11, и шариков 14.
Центральное, колесо 15 жестко связано с корпусом 3 механической руки, а его зубья выполнены в виде конических роликов. Разница зубьев сателлит ного зубчатого колеса 11 ( ) и роликов центрального колеса 15 ( равна ± 1.
Механизм ротации исполнительного органа 4 выполнен в виде цилиндрической зубчатой передачи, ведущее зубчатое колесо 16 которой установлено соосно корпусу 3 механической руки и сателлитному зубчатому колесу 11 прецессионной- передачи и жестко связано с полым центральным валом 17, который соединен с сателлитным зубчатым колесом 11 посредством зубчатой муфты 18. Ведомый зубчатый сектор 19 установлен на основании 1 с возможностью жесткого соединения с послед
5)
ним посредством управляющей муфты 20, выполненной в виде электромагнита 21 и пальца 22.
15
25
7220
5
10 .
Механизм продольного перемещения исполнительного органа выполнен в ви- виде винтовой передачи, гайки 23 которой установлены в ступице сателлит- ноги зубчатого колеса 11 посредством обойм 24, а винт 25 размещен в ступице сателлитного колеса 11, и связан с исполнительным органом 4 посредством винтовой нарезки. В ступице, ведущего зубчатого колеса 16 цилиндрической передачи размещена вторая управляющая муфта в виде электромаг- ,нита 26, установленная с возможностью соединения полого центрального вала 17 с переходной втулкой 27; связанной посредством шлицев 28 с исполнительным органом 4.
Манипулятор работает следующим об- раз,ом.
Вращение от электродвигателя 10 посредством диска 12 и шариков 14 преобразуется в прецессионное движение сателлитного зубчатого колеса 11. Благодаря редукции в прецессионной передаче полый центральньй вал 17 вращается с редукцией:
Z,
Z:,
1 ;jh
-Z.
0
5
0
50
Поворот корпуса 3 вокруг оси основания 1 осуществляется при включенном электромагните 21, при этом палец 22 застопаривает ведомый зубчатый сектор 19 к основанию 1 и., следовательно, вращение полого центрального вала 17 вызывает поворот корпуса 3 механической руки вокруг оси основания 1.
Ротация исполнительного органа 4 осуществляется при включенном состоянии электромагнитов 21 и 26,, при этом кинематическая связь: ведущее зубчатое колесо 16 - ведймый зубчатьй сектор 19 основание 1 размыкается,
а цепь: полый центральный вал 17 - переходная втулка 27 замыкается. В результате этого вращение полого центрального вала 17 передается исполнительному органу 4, вызьгоая его поворот (ротацию) вокруг своей оси. Продольное перемещение исполнительного органа 4 осуществляется также от электродвигателя 10, при этом сателлитное зубчатое колесо 11, совершая
5 прецессионное движение, заставляет гайки 23 винтовой передачи, симметрично расположенные относительно центра прецессии, частично зацепляться с винтом 25, вызывая его перемещение. Связанный с исполнительным . органом 4 с помощью резьбового соединения ёянт 25 заставляет исполнительный орган 4 перемещаться вдоль его оси с редукцией, равной передаточному отнощению винтовой передачи на определенное расстояние.до выхода винтовой нарезки винта 25 из контакта с винтовой нарезкой исполнительного органа 4. Дальнейшее перемещение винта 25 не вызывает- перемещение исполнительного органа 4, а только перемещение щариков 8, которые посредством тросика 7. вызывают охват рабочей заготовки подпружиненными зажимными элементами 6. В таком положении шарики 8 фиксируются электромагнитом 9. После передвижения рабочей заготовки в нужное положение электромагнит 9 отключается и схваты 5 отпускают ее. Возвращение манипулятора в ис- хйдное положение производится изменением направления вращения электродвигателя 10.
Формула изобретения
Манипулятор, содержащий основание, установленную на нем с возможностью поворота механическую руку, исполни- 30 тельный орган, размещенный с возможностью продольного перемещения и ротации относительно корпуса механической руки, механизмы его продольного перемещения и ротации, схват с меха- 35 низмом перемещения его зажимных элеРедактор А. Ворович
Составитель А. Ширяева
Техред Л.Сердюкова Корректор М. Шароши
Заказ 5931/13 Тираж 952 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ментов и привод, включающий двигатель, кинематически связанный с корпусом механической руки, отличающийся тем, что, с целью повьшения точности позиционирования за счет снижения материалоемкости, он снабжен управляющими муфтами, а кинематическая связь двигателя с корпусом механической руки выполнена в виде прецессионной передачи, сател- литное зубчатое колесо которой жестко связано с валом двигателя, а центральное роликовое колесо - с корпусом механической руки, причем механизм ротации исполнительного органа выполнен в виде цилиндрической передачи, ведущее зубча.тое колесо которой установлено соосно оси сателлитного зубчатого колеса прецессионной передачи и кинематически связано с ним, а ведомый зубчатый сектор этой передачи размеще1й на основании с возможностью соединения с ним посредЬтвом первой управляющей муфты, при этом механизм продольного перемещения исполнительного органа выполнен в виде винтовой передачи, тайки которой установлены в ступице сателлитного зубчатого колеса прецессионной передачи, а винт кинематически связан с исполнительным органом и с механизмом перемещения зажимных элементов схвата, причем исполнительный орган установлен с возможностью взаимодействия с ведущим зубчатьм колесом цилиндрической передачи посредствомвторой управляющеймуфты.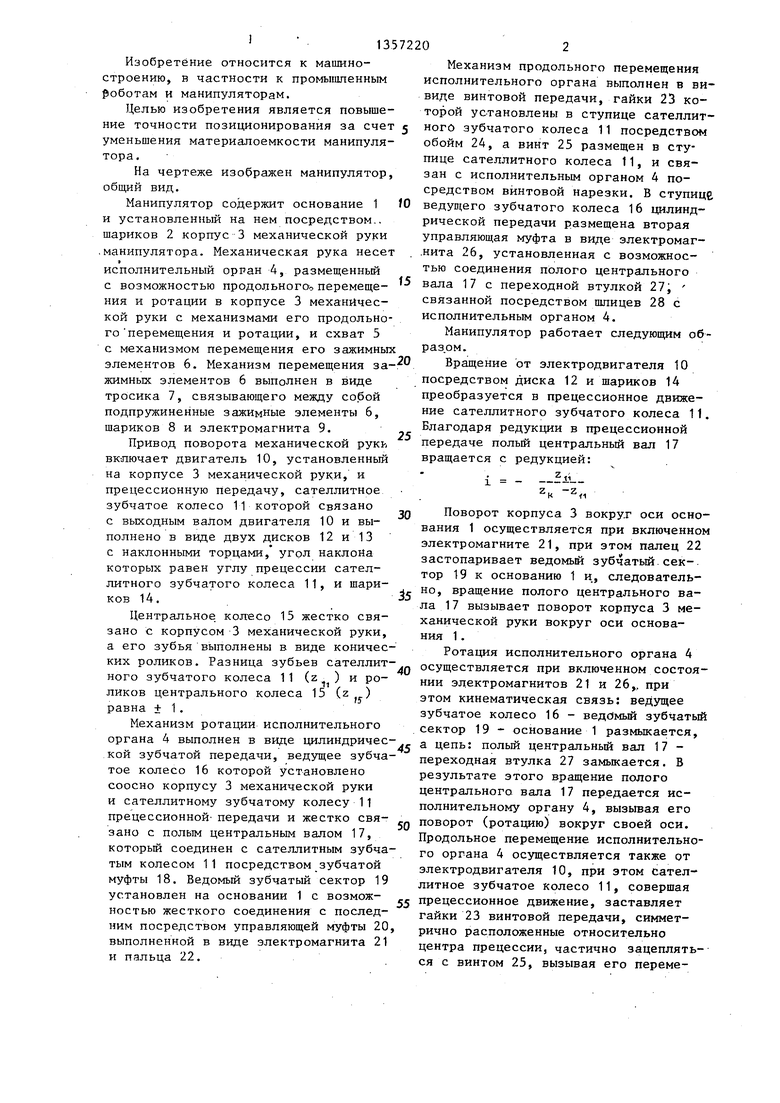

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1987 |
|
SU1511115A1 |
| Захват промышленного робота | 1987 |
|
SU1451004A1 |
| Захват промышленного робота | 1988 |
|
SU1583285A1 |
| Манипулятор | 1987 |
|
SU1511120A1 |
| Сборочная головка | 1989 |
|
SU1713768A1 |
| Захват манипулятора | 1988 |
|
SU1593950A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Манипулятор | 1987 |
|
SU1465301A1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1646845A1 |
Изобретение относится к области машиностроения, в частности к промышленным роботам и манипуляторам. Целью изобретения является-повьш1ение точности позиционирования за счет уменьшения материалоемкости манипулятора. Это достигается тем, что поворот механической руки, продольное перемещение и ротация исполнительного органа 4 и перемеш;ение зйжимных элементов 6 схвата 5 осуществляются от одного электродвигателя 10, вал которого связан с центральным зубчатым колесом 11 прецессионной передачи, а сателлит этой передачи жестко связан с корпусом 3механической руки. Передача движения на ведомое зубчатое колесо 16 цилиндрической зубчатой передачи механизма ротации исполнительного органа 4осуществляется от центрального зубчатого колеса 11, а зубчатый сектор 19 установлен на основании 1 с возможностью стопорения с последним посредством управляющей муфты 2. Про-- дольное перемещение исполнительного органа 4 осуществляется посредством винтовой передачи, гайки 23 ко торой . размещены в ступице центрального зубчатого колеса 11, а винт связан с исполнительным органом 4 и механизмом перемещения зажимных элементов 6 схвата 5, при этом исполнительный орган 4 установлен с возможностью сое- динения с ведомым зубчатым колесом 16 посредством управляющей ьтуфты. 1 ил. л 2S сл со 1сл ito ю
| Манипулятор | 1970 |
|
SU334777A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
