Изобретение относится к тракторному и сельскохозяйственному машиностроению, а именно к системам управления навесного оборудования промышленных тракторов.
Целью изобретения является повышение эффективности управления рабочим процессом трактора во всем диапазоне грунтовых условий за счет автоматического изменения структуры системы управления при изменении оператором рабочей передачи.
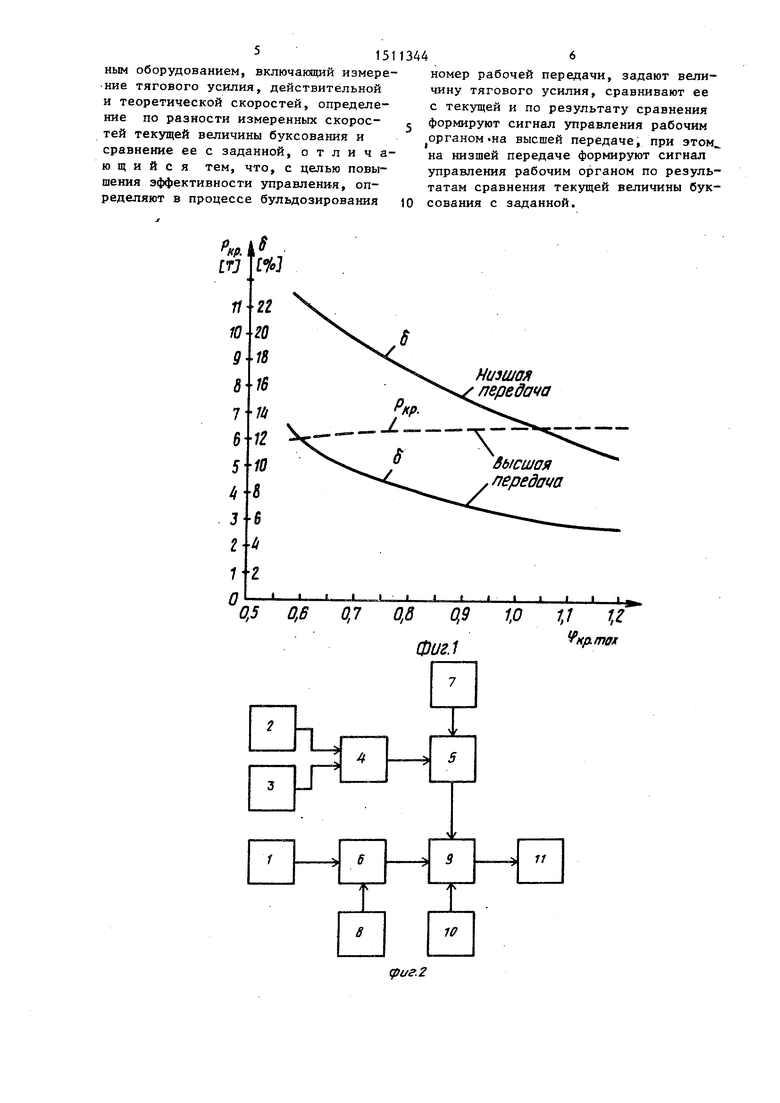
На фиг.1 приведены графики, показывающие зависимости оптимальных значений тягового усилия и коэффициента буксования трактора от максимально возможного по сцеплению тягового усилия; на фиг.2 - функциональная схема устройства.
Устройство, реализукицее способ, содержит датчик тягового усилия 1, датчики действительной 2 и теоретической 3 скоростей движения машины, выходы которых подключены ко входам блока определения буксования 4, первый 5 и второй 6 блоки сравнения, первые входы которых подключены к выходам первого 7 и второго 8 задающих
Юо
3151
блоков, вторые входы подключены соответственно к выходам блока определения буксования 4 и датчика тягового усилия 1, а выходы блоков сравнения 5 и 6 подключены к информационным входам коммутатора 9, к управляющему входу которого подключен датчик номера передачи 10, при этом коммутатор 9 соединен с электрог)здравлическим приводом 11 рабочего органа,
Суть предложенного способа управления заключается в следующем,
В зависимости от номера рабочей передачи осуществляются стабилизация или буксования движителей или тягового усилия трактора.
При изменении грунтовых условий изменяется максимально возможное по сцеплению движителя с грунтом удельное тяговое усилие трактора
П, iE:J t«fcc (f, ллакс Q
Г .
где G вес бульдозерного агрегата
Соответственно изменяются тяговая характеристика трактора и значения тягового усилия и коэффициента буксования 8 , соответствующие максимуму тяговой мощности трактора (графики изменения реальных значений этих параметров приведены на фиг.1).
При работе на плотных грунтах на низшей передаче стабилизация коэффициента буксования на уровне 13 15% обеспечивает эффективную работу трактора, В устройстве (фиго 2) первый задающий блок 7 формирует заданное значение буксования 8д порядка 14%. Текущее значение коэффициента буксования определяется блоком 4 на основании результатов измерения дейстлзи- тельной 2 и теоретической 3 скоростей движения машины. Результат сравнения текущего и заданного значений коэффициента буксования формируется при помощи первого блока сравнения 5. При работе на первой пере,чаче коммутатор 9 подключает выход первого блока сравнения 5, ко входу Электр о гидравлического привода 11 рабочего органа, которьм, изменяя положение рабочего органа по высоте, обеспечивает заданное значение коэффициента буксования
Однако значение S порядка 14% не является оптимальным для низшей передачи. В большинстве случаев, за не
0
5
444
ключением самых слабых грунтов, попытка поддержания буксования порядка 14% при работе .на высшей передаче
приводит к полному нарушению работоспособности - тягового усилия трактора недостаточно для создания этой величины буксования.
Обеспечение работоспособности системы управления в режиме стабилизации буксования на высшей передаче путем снижения заданной величины буксования нерационально, так как приводит ю существенному снижению производительности трактора. Это объясняется тем, что оптимальная величина буксования на высшей передаче изменяется более чем в 2 раза (фиг.О, снижение может составлять более 5%.
Однако на высшей передаче (фиг.1, Р ) в весьма малых пределах изменяется оптимальное значение тягового усилия (порядка 10%)„ Поэтому при включении оператором высшей передачи и соответствующем формировании при помощи датчика номера передачи 10 информационного сигнала и включении высшей передачи коммутатор 9 переключает устройство в режим стабилизации тягового усилия. Второй задающий блок 8 формирует заданное значение тягового усилия Р на уровне 6-6,5 т, Это значение при помощи второго блока 6 сравнения сравнивается с выход- ньм сигналом датчика 1 тягового уси- ,тшЯо Выход второго блока 6 сравнения при этом через коммутатор 9 соединен с входом электрогидравлического привода 11 рабочего органа. Благодаря этому происходит уменьшение рассогласования по тяговому усилию.
Таким образам, предлагаемый способ обеспечивает эффективное управление рабочим процессом трактора на двух рабочих передачах, в то время как прототип - только на одной передаче, так как стабилизация одного- заданного значения коэффициента буксования на двух передачах невозможна. Переход ,от работы на одной передаче к работу. на двух передачах эквивалентен повышению производительности и снижению удельного расхода топлива примерно на 10%.
Формула изобретения
Способ управления рабочим процессом трактора в агрегате с бульдозер0
5
О
0
5
5151
ным оборудованием, включакяций измерение тягового усилия, действительной и теоретической скоростей, определение по разности измеренных скоростей текущей величины буксования и сравнение ее с заданной, отличающийся тем, что, с целью повышения эффективности управления, определяют в процессе бульдозирования
13446
номер рабочей передачи, задают величину тягового усилия, сравнивают ее с текущей и по результату сравнения
формируют сигнал управления рабочим органом на высшей передаче, при этом на низшей передаче формируют сигнал управления рабочим органом по результатам сравнения текущей величины бук10 сования с заданной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования рабочих процессов землеройно-транспортной машины | 1985 |
|
SU1315571A1 |
| Способ регулирования рабочих процессов землеройно-транспортных машин и устройство для его осуществления | 1984 |
|
SU1234537A1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РАБОЧИХ ПРОЦЕССОВ ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2011764C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| ТРАКТОР С РЕГИСТРАТОРОМ ПАРАМЕТРОВ | 2014 |
|
RU2542571C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2013 |
|
RU2560210C2 |
| ТРАКТОРНЫЙ АГРЕГАТ С СИСТЕМОЙ ОГРАНИЧЕНИЯ ДОСТУПА К ЕГО УПРАВЛЕНИЮ | 2014 |
|
RU2557107C1 |
| Способ контроля параметров машино-тракторного агрегата | 2020 |
|
RU2748816C1 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
Изобретение относится к тракторному и сельскохозяйственному машиностроению. Цель - повышение эффективности управления работой трактора во всем диапазоне грунтовых условий за счет автоматического изменения структуры системы управления при изменении оператором рабочей передачи. Для этого в процессе бульдозирования определяют номер рабочей передачи, задают величину тягового усилия и измеряют текущее значение. Заданную величину тягового усилия сравнивают с текущей и по результату сравнения формируют сигнал управления рабочим органом на высшей передаче. На низшей передаче формируют сигнал управления рабочим органом по результатам сравнения текущей величины буксования с заданной. При этом текущую величину буксования определяют по разности измеряемых действительной и теоретической скоростей. При работе на двух передачах повышается производительность и снижается удельный расход топлива примерно на 10%. 2 ил.
0,5 0,6 0,7 0,8 0,9
фиг.1
1,1 1,г
.tnffx
| Устройство управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1342981A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ регулирования рабочих процессов землеройно-транспортных машин и устройство для его осуществления | 1984 |
|
SU1234537A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
