;1
Изобретение относится к устройствам для проектирования и исследования пространственных рычажных механизмов, например, в ш-вейных машинах, и предназначено для облегчения проектирования и исследования пространственных четырехзвенников общего типа, т. е. при произвольном расположении осей вращения ведущего и ведомого звеньев.
Предлагаемое устройство облегчает выбор необходимых параметров и дает возможность получать требуемые кинематические и динамические характеристики пространственных рычажных четырехзвенных механизмов.
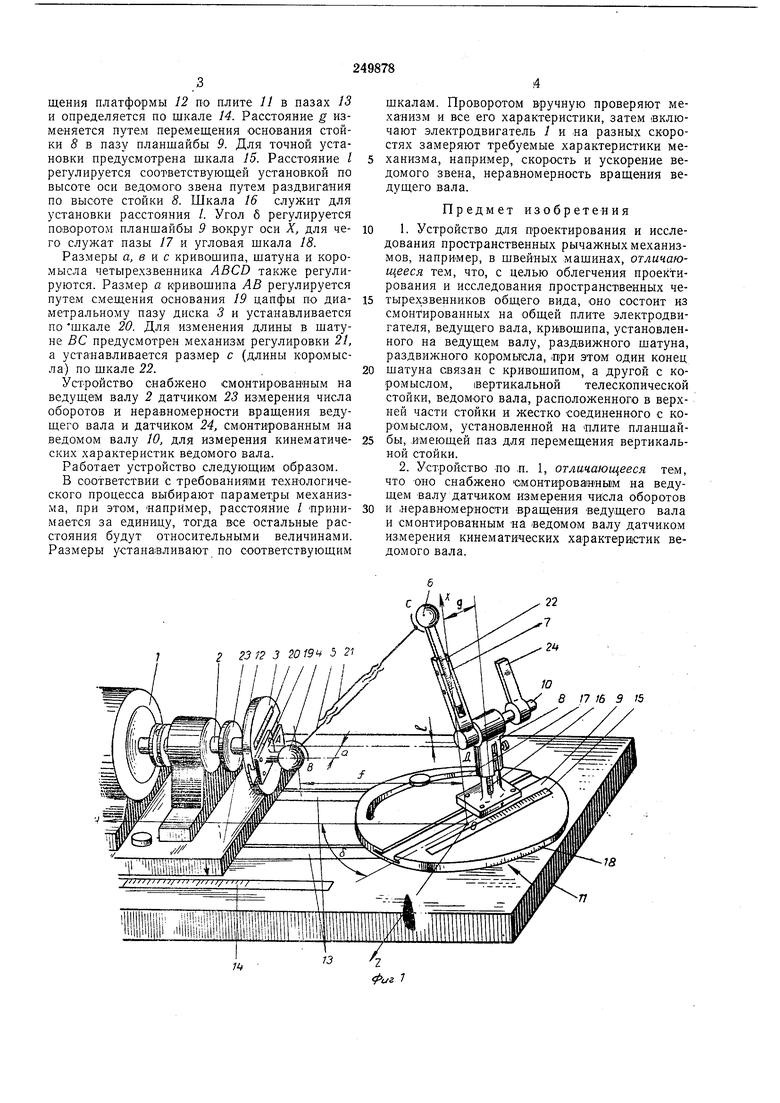
На фиг. 1 изображено предлагаемое устройство, общий ;вид; на фиг. 2 - схема пространственного четырехзвенника с двумя вращательными и двумя шаровыми парами.
Пространственный четырехзвенник ABCD имеет две пары А к D вращательные и две пары В и С шаровые. Если направить ось А по кратчайщему расстоянию OQ между осями вращения ОА и QD кривошипа АВ и коромысла CD, а ось У направить по оси ОА, то четырехзвенник ABCD характеризуется следующими параметрами: расстоянием / от оси X плоскости движения кривошипа АВ, кратчайшим расстоянием / между осями ОА и QD, углом б в плоскости YOZ, определяющим положение оси OD, расстоянием g от оси X плоскости движения коромысла CD и размерами а -
кривошипа АВ, в - шатуна ВС, с - коромысла CD.
Устройство для проектирования и исследования пространственных четырехзвенников содержит электродвигатель 1, на ведущем валу 2 которого установлен диск 3, несущий шаровую цапфу 4 ведущего шарнира. Расстояние АВ между осью диска 3 и центром шаровой цапфы 4 будет составлять кривошип четырехзвенника длиною а.
Раздвижной шатун 5 охватывает шаровые цапфы 4 и 6 ведущего В и ведомого С шарниров. Один конец шатуна связан с кривошипом, а другой - с коромыслом 7. Последнее является ведомым звеном и закреплено на оси, установленной в шариковых подщипниках вертикальной телескопической стойки 8, которая укреплена на планшайбе 9, имеющей диаметральный паз для перемещения стойки 8. В верхней части стойки 8 расположен ведомый вал 10, жестко соединенный с коромыслом 7.
Все устройство смонтировано «а плите 11. Для каждого из параметров предусмотрена регулировка и шкала для облегчения регулировки. Так, скорость вращения ведущего звена регулируется величиной напряжения тока питания электродвигателя /.
щения платформы 12 по плите У/ в пазах 13 и определяется по шкале 14. Расстояние g изменяется путем перемещения основания стойки S в пазу планшайбы 9. Для точной установки предусмотрена шкала 15. Расстояние / регулируется соответствующей установкой по высоте оси ведомого звена путем раздвигания по высоте стойки 8. Шкала 16 служит для установки расстояния /. Угол б регулируется поворотом плаишайбы 9 вокруг оси X, для чего служат пазы 17 и угловая шкала 18.
Размеры а, в н с кривошипа, шатуна и коромысла четырехзвенника ABCD также регулируются. Размер а кривошипа АВ регулируется путем смешения основания 19 цапфы по диаметральному пазу диска 5 и устанавливается по шкале 20. Для изменения длины в шатуне ВС предусмотрен механизм регулировки 21, а устанавливается размер с (длины коромысла) по шкале 22.
Устройство снабжено смонтированным на ведущем валу 2 датчиком 23 измерения числа оборотов и неравномерности вращения ведущего вала и датчиком 24, смонтированным на ведомом валу 10, для измерения кинематических характеристик ведомого вала.
Работает устройство следующим образом.
В соответствии с требованиями технологического процесса выбирают параметры механизма, при этом, например, расстояние / принимается за единицу, тогда все остальные расстояния будут относительными величинами. Размеры устанавливают по соответствующим
шкалам. Проворотом вручную проверяют механизм и все его характеристики, затем включают электродвигатель 1 и на разных скоростях замеряют требуемые характеристики механизма, например, скорость и ускорение ведомого звена, неравномерность вращения ведущего вала.
Предмет изобретения
1. Устройство для проектирования и исследования пространственных рычажных механизмов, например, в швейных машинах, отличающееся тем, что, с целью облегчения проектирования и исследования пространст1венных четырехзвенников общего вида, оно состоит из смонтированных на общей плите электродвигателя, ведущего вала, кривошипа, установленного на ведущем валу, раздвижного щатуна, раздвижного коромысла, ири этом один конец
шатуна связан с кривошипом, а другой с коромыслом, вертикальной телескопической стойки, ведомого вала, расположенного в верхней части стойки и жестко соединенного с коромыслом, установленной на плите планшайбы, имеющей паз для перемещения вертикальной стойки.
2. Устройство по л. 1, отличающееся тем, что оно снабжено смонтироваиным на ведущем валу датчиком измерения числа оборотов
и неравномерности вращения ведущего вала и смонтированным на ведомом валу датчиком измерения кинематических характеристик ведомого вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| Устройство для кинематического исследования шарнирного многозвенника | 1974 |
|
SU686907A1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РАСЧЕТА ШАТУННО-КУЛАЧКОВЫХ МЕХАНИЗМОВ | 1970 |
|
SU274360A1 |
| Пространственный регулируемый рычажный механизм | 1986 |
|
SU1315696A1 |
| УСТРОЙСТВО С ПОВОРОТНОЙ КРЕПЕЖНОЙ ПАНЕЛЬЮ ДЛЯ УСТРОЙСТВА ОТОБРАЖЕНИЯ | 2019 |
|
RU2796028C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| Привод составных игл плоской основовязальной машины с двумя игольницами | 1981 |
|
SU1052586A1 |

