Изобретение относится к машиностроению, а именно к контролю подшипниковых узлов, и может быть использовано для диагностирования подшипниковых узлов электрических машин в эксплуатационных условиях.
Цель изобретения - повьшгение точности и достоверности измерений, а также расширение области применения .
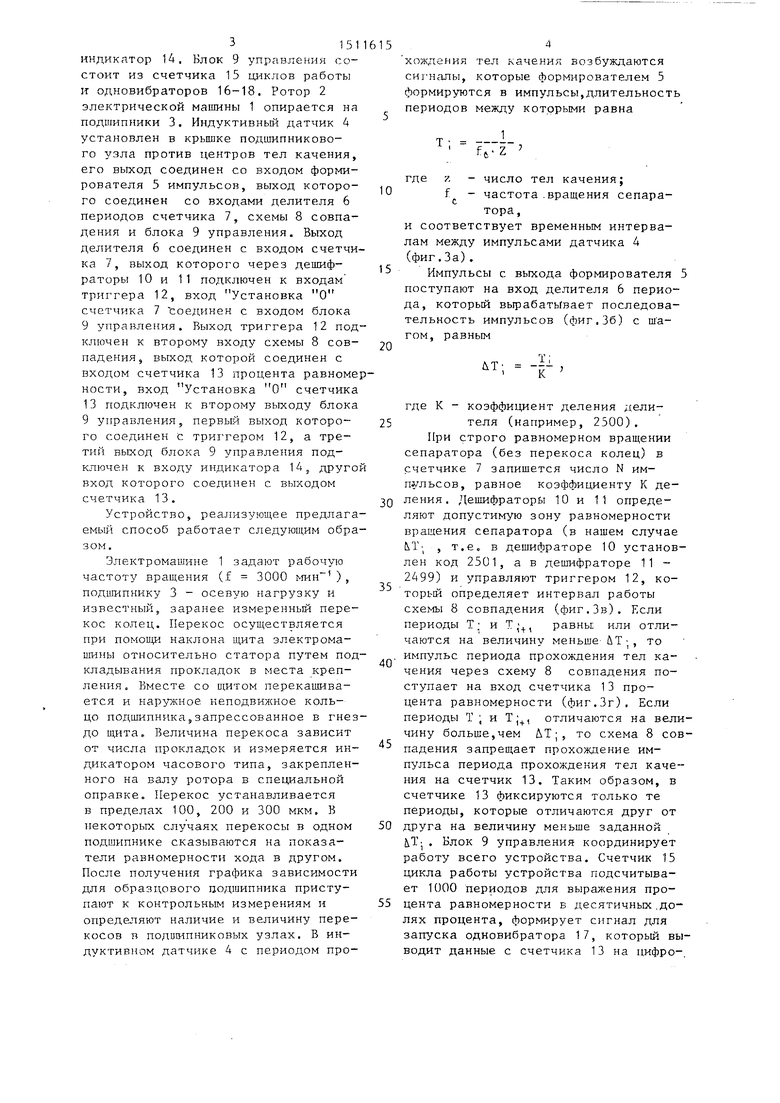
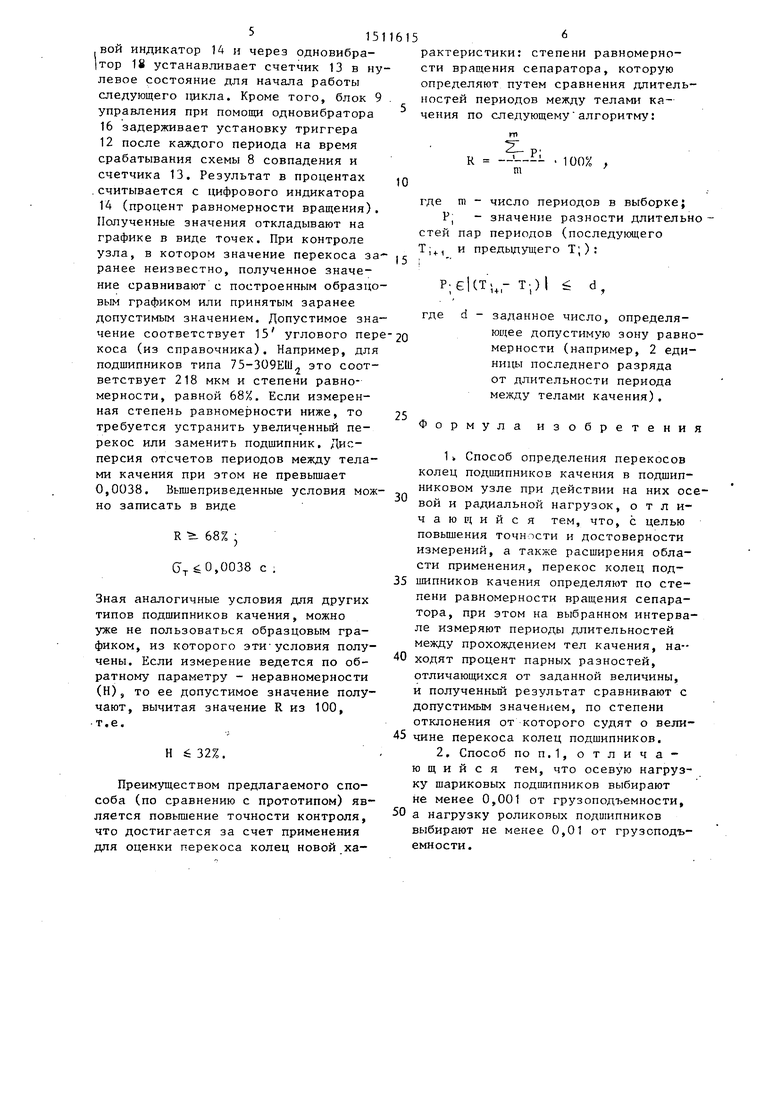
На фиг.1 изображена зависимость между перекосами колец и равномерностью вращения сепаратора;на фиг.2 - структурная схема устройства, реализующего предлагаемый способ; на фиг.З - временные диаграммы, пояс- няюп1ие работу устройства.
Устройство, реализующее предлагав- мьй способ, содержит электрическую машину 1 типа ЛТТ-8-400, ротор 2, два шариковых однорядных подшипника . типа 75-309 ЕЫ, индуктивный датчик 4, формирователь 5 импульсов периода прохождения тел качения, делитель 6 периода, счетчик 7, схему 8 совпадения, блок 9 управления дешифратора 10 и 11, триггер 12, счет.чик 13 процента равномерности, цифровой
ел
ел
3151
индикатор 14, Блок 9 управления состоит из счетчика 15 циклов работы If одновибраторов 16-18. Ротор 2 электрической машины 1 опирается на подшипршки 3. Индуктивный датчик 4 установлен в крышке подшипникового узла против центров тел качения, его выход соединен со входом формирователя 5 импульсов, выход которо- го соединен со входами делителя 6 периодов счетчика 7, схемы 8 совпадения и блока 9 управления. Выход делителя 6 соединен с входом счетчика 7, выход которого через дешиф- раторы 10 и 11 подключен к входам триггера 12, вход Установка О счетчика 7 соединен с входом блока 9 управления. Выход триггера 12 подключен к второму входу схемы В сов- падения, выход которой соединен с входом счетчика 13 процента равномености, вход Установка О счетчика 13 подключен к второму выходу блока 9 управления, первый выход которо- го соединен с триггером 12, а третий выход блока 9 управления подключен к входу индикатора 14, друго вход которого соединен с выходом счетчика 13,
Устройство, реализующее предлага емьш способ работает следующим образом.
Электромашине 1 задают рабочую частоту вращения (f 3000 ), подшипнику 3 - осевую нагрузку и известный, заранее измеренный перекос колец. Перекос осуществляется при помощи наклона щита электромашины относительно статора путем подкладывания прокладок в места крепления. Вместе со щитом перекашивается и нар},окное неподвижное кольцо подшипнрп-са5запрессованное в гнездо щита. Величина перекоса зависит от числа прокладок и измеряется индикатором часового типа, закрепленного на валу ротора в специальной оправке. Перекос устанавливается в пределах 100, 200 и 300 мкм, В некоторых случаях перекосы в одном подшипнике сказываются на показатели равномерности хода в другом. После получения графика зависимости для образцового подшипника приступают к контрольным измерениям и определяют наличие и величину перекосов в подшипниковых узлах, В индуктивном датчике 4 с периодом про
хождения тел качения возбуждаются сиг налы, которые формирователем 5 формируются в импульсы,длительность периодов между которыми равна
Т .1
ffZ V
где 7. - число тел качения;
f - частота .вращения сепаратора,
и соответствует временным интервалам между импульсами датчика 4 (фиг,За).
Импульсы с выхода формирователя поступают на вход делителя 6 периода, который вырабатьгвает последовательность импульсов (фиг, 36) с ш а- гом, равным
ЛТ --- , К
где К - коэффициент деления делителя (например, 2500), При строго равномерном вращении сепаратора (без перекоса колец) в счетчике 7 запишется число N ИМПУЛЬСОВ, равное коэффициенту К деления. Дешифраторы 10 и 11 определяют допустимую зону равномерности вращения сепаратора (в нашем случае ЬТ , т,ео в дешифраторе 10 установлен код 2501, а в дешифраторе 11 - 2499) и управляют триггером 12, который определяет интервал работы схемы 8 совпадения (фиг,3в). Если периоды Т; и Т;, равны или отличаются на величину меньше UT , то импульс периода прохождения тел качения через схему 8 совпадения поступает на вход счетчика 13 процента равномерности (фиг,3г). Если
периоды Т ; и Т;, отличаются на величину больше,чем &Т;, то схема 8 совпадения запрещает прохождение импульса периода прохождения тел качения на счетчик 13. Таким образом, в счетчике 13 фиксируются только те периоды, которые отличаются друг от друга на величину меньше заданной Т;, Блок 9 управления координирует работу всего устройства. Счетчик 15 цикла работы устройства подсчитывает 1000 периодов для выражения процента равномерности в десятичных.долях процента, формирует сигнал для запуска одновибратора 17, который выводит данные с счетчика 13 на цифро-.
515
вой индикатор 14 н через одновибра- тор 18 устанавливает счетчик 13 в нулевое состояние для начала работы следующего цикла. Кроме того, блок 9 управления при помощи одновибратора 16 задерживает установку триггера 12 после каждого периода на время срабатывания схемы 8 совпадения и счетчика 13, Результат в процентах ,считывается с цифрового индикатора 14 (процент равномерности вращения). Полученные значения откладывают на графике в виде точек. При контроле узла, в котором значение перекоса за ранее неизвестно, полученное значение сравнивают с построенным образцовым графиком или принятым заранее допустимым значением. Допустимое значение соответствует 15 углового перкоса (из справочника). Например, для подшипников типа 75-309ЕШ2 это соответствует 218 мкм и степени равномерности, равной 68%. Если измеренная степень равноме зности ниже, то требуется устранить увеличенный перекос или заменить подшипник. Дисперсия отсчетов периодов между телами качения при этом не превышает 0,0038. Вышеприведенные условия можно записать в виде
R 68%
J 0,0038 с ;
Зная аналогичные условия для других типов подшипников качения, можно уже не пользоваться образцовым графиком, из которого ЭТИ условия получены. Если измерение ведется по обратному параметру - неравномерности (Н), то ее допустимое значение получают, вычитая значение R из 100, т.е.
Н 6 32%.
Преимуществом предлагаемого способа (по сравнению с прототипом) является повьш1ение точности контроля, что достигается за счет применения для оценки перекоса колец новой ха. 1615
рактеристики: степени равномерности вращения сепаратора, которую определяют путем сравнения длительностей периодов между телами качения по следующему алгоритму:
R
р;
m
100%
10
где m - число периодов в выборке;
Р, - значение разности длительно стей пар периодов (последукяцего Т;., и предыдущего Т;):
Р е1(Т;,- Т;)|
где d - заданное число, определя- ющее допустимую зону равномерности (например, 2 единицы последнего разряда от длительности периода между телами качения).
25
Формула изобретения
30
1 Способ определения перекосов колец подшипников качения в подшипниковом узле при действии на них освой и радиальной нагрузок, отличающийся тем, что, с целью повьшдения точности и достоверности измерений, а также расширения области применения, перекос колец под35 шипников качения определяют по степени равномерности вращения сепаратора, при этом на выбранном интервале измеряют периоды длительностей между прохождением тел качения, на-- ходят процент парных разностей, отличающихся от заданной величины, и полученньй результат сравнивают с допустимым значением, по степени отклонения от которого судят о вели45 чине перекоса колец подшипников.
2, Способ ПОП.1, отличающийся тем, что осевую нагрузку шариковых подшипников выбирают не менее 0,001 от грузоподъемности,
50 а нагрузку роликовых подшипников
выбирают не менее 0,01 от грузоподъемности.
40
,в-,вЯ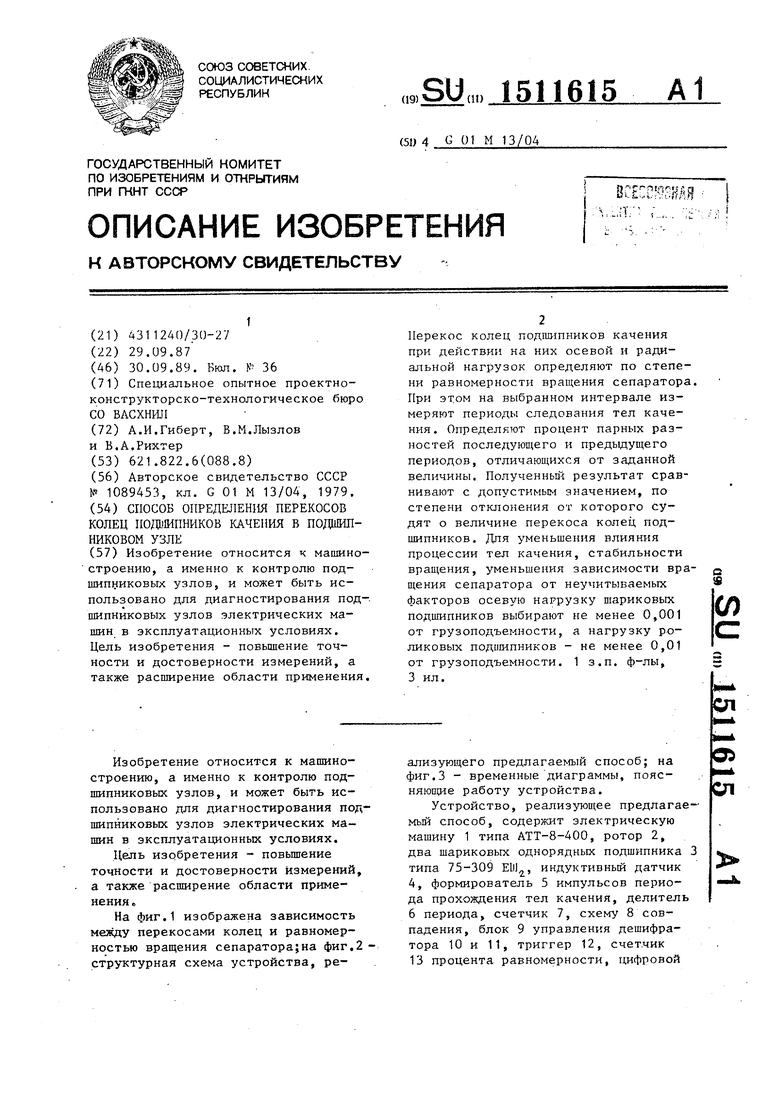
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕЛ КАЧЕНИЯ ПОДШИПНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2124191C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ НЕПОДВИЖНОГО КОЛЬЦА ПОДШИПНИКА КАЧЕНИЯ В ДВУХОПОРНОМ УЗЛЕ | 1997 |
|
RU2124190C1 |
| Способ диагностики тел качения подшипников | 1985 |
|
SU1272142A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1998 |
|
RU2154264C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2110053C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2098789C1 |
| Устройство для контроля угла контакта шарикоподшипников | 1984 |
|
SU1216700A1 |
| Роликовый упорный подшипник | 1988 |
|
SU1751493A1 |
| Устройство для выявления дефектов подшипников | 1980 |
|
SU1059447A1 |
| Устройство контроля частоты вращения | 1985 |
|
SU1303941A1 |
Изобретение относится к машиностроению, а именно к контролю подшипниковых узлов, и может быть использовано для диагностирования подшипниковых узлов электрических машин в эксплуатационных условиях. Цель изобретения - повышение точности и достоверности измерений, а также расширение области применения. Перекос колец подшипников качения при действии на них осевой и радиальной нагрузок определяют по степени равномерности вращения сепаратора. При этом на выбранном интервале измеряют периоды следования тел качения. Определяют процент парных разностей последующего и предыдущего периодов, отличающихся от заданной величины. Полученный результат сравнивают с допустимым значением, по степени отклонения от которого судят о величине перекоса колец подшипников. Для уменьшения влияния процессии тел качения, стабильности вращения, уменьшения зависимости вращения сепаратора от неучитываемых факторов осевую нагрузку шариковых подшипников выбирают не менее 0,001 от грузоподъемности, а нагрузку роликовых подшипников не менее 0,01 от грузоподъемности. 1 з.п. ф-лы, 3 ил.
w SO ao
Фие.;
,
.T7 .
.l Ж LLI П1 I П
2лП
WO Д%
JL
ni 11.
2лП
| Способ определения перекоса внутреннего кольца шарикоподшипника | 1979 |
|
SU1089453A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
