Изобретение относится к области измерительной техники и может быть, преимущественно, использовано для диагностирования поверхностей тел качения подшипников в узлах в процессе эксплуатации и ремонта машин и механизмов.
Известен способ диагностирования тел качения подшипника, включающий вращение одного из его колец и оценку легкости вращения. При этом о наличии дефектов на поверхностях качения судят по характерным заеданиям, хрусту, щелканию /1/.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, относят то, что в известном способе легкость вращения определяет оператор, поэтому такая оценка носит субъективный характер.
Известно устройство, включающее источник электрического напряжения, один полюс которого через формирователь импульсов и токосъемник подключен к валу контролируемого подшипникового узла, а другой полюс подключен к наружному кольцу контролируемого подшипника и счетчик, связанный с выходом временного селектора, к первому входу которого подключен выход формирователя импульсов, а ко второму входу - выход генератора опорной частоты /2/.
К причинам, препятствующим достижению указанного технического результат, при использовании известного устройства относят то, что в известном устройстве определяется интегральный параметр режима смазки подшипника, комплексно характеризующий техническое состояние всего подшипника, и выделить информацию о качестве поверхностей отдельных деталей, в частности тел качения, не представляется возможным.
Наиболее близким того же назначения к заявляемому способу в группе изобретений по совокупности признаков является способ диагностики тел качения подшипников, заключающийся в измерении интегрального параметра режима смазки каждого тела качения при вращении с рабочей частотой одного из колец смазанного и нагруженного постоянной по величине радиальной нагрузкой подшипника и в оценке качества поверхности каждого тела по отклонению значения измеренного для него параметра от наименьшего значения.
В известном способе направление нагрузки оставляют неизменным относительно неподвижного кольца, а измерения проводят при прохождении телом качения углового сектора с размерами ±π/Z от линии действия радиальной нагрузки, где Z - число тел качения подшипника. Значение диагностического параметра определяется качеством поверхностей деталей подшипника, попадающих за время его измерения в зону нагружения. В известном способе за время каждого измерения в зоне нагружения находится диагностируемое тело качения и участки дорожек качения неподвижного и быстро вращающегося кольца. Последующие измерения проводят в моменты прохождения указанного углового сектора другими телами качения подшипника, и так контролируют все тела качения. В качестве интегрального параметра режима смазки используют, например, нормированное интегральное время разрушения смазочной пленки, численно равное отношению суммарного времени разрушений смазочной пленки в контактных зонах деталей подшипника ко времени измерения. При наличии в зоне нагружения дефектного тела качения значение интегрального параметра резко возрастает /3/. Способ принят за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, принятого за прототип, относят то, что в известном способе за время каждого измерения кроме диагностируемого тела качения в зоне нагружения присутствуют два смежных с ним тела качения. Зона контроля определяется зоной нагружения в подшипнике, которая представляет собой угловой сектор с минимальными размерами ±2π/Z от линии действия радиальной нагрузки. Причем нагрузка, воспринимается телом качения в зависимости от его углового положения изменяется от максимума при расположении тела качения на линии действия нагрузки до нуля на границах зоны.
В момент начала измерения, когда диагностируемое тело качения находится на угловом расстоянии -π/Z предыдущее тело качения расположено на расстоянии +π/Z и испытывает такую же нагрузку, как и диагностируемое тело качения, приблизительно равную 0,5 от значения радиальной нагрузки на подшипник (от номинального значения) /4/. По мере приближения диагностируемого тела качения к линии действия радиальной нагрузки в процессе измерения интегрального параметра режима смазки подшипника воспринимаемая им нагрузка возрастает до номинального значения, а нагрузка, воспринимаемая предыдущим телом качения уменьшается до нуля. Дальнейшее перемещение диагностируемого тела качения к границе сектора +π/Z приводит к снижению значения воспринимаемой им нагрузки до 0,5 от номинального, предыдущее тело качения нагрузку не испытывает, однако нагрузка, воспринимаемая последующим телом качения изменяется от нуля до 0,5 от номинального значения. В результате диагностируемое тело качения испытывает нагрузку, значение которой в среднем за время измерения составляет 0,75 от номинального, а смежные с ним тела качения - по 0,125 от номинального. Таким образом, смежные тела качения, находясь за время измерения диагностического параметра в зоне контроля, оказывают существенное влияние на результат измерения последнего. Точность диагностирования тел качения при этом сравнительно невелика.
Наиболее близким устройством того же назначения к заявленному устройству в группе изобретений по совокупности признаков является устройство, содержащее источник электрического напряжения, один полюс которого через формирователь импульсов и токосъемник подключен к валу контролируемого подшипникового узла, а другой полюс подключен к наружному кольцу контролируемого подшипника, счетчик, связанный с выходом временного селектора, к первому входу которого подключен выход формирователя импульсов, а ко второму - генератор опорной частоты, устройство нагружения, выполненное с возможностью кинематической связи с валом контролируемого подшипникового узла, а также датчик угла поворота сепаратора, расположенный в непосредственной близости от сепаратора контролируемого подшипника, и одновибратор.
Известное устройство также содержит два делителя частоты, входами подключенные к выходам одновибратора и датчика угла поворота сепаратора, а выходами - ко входу триггера, выходом соединенного с третьим входом временного селектора /3/. Устройство принято за прототип.
К причинам, препятствующим достижению указанного технического результата при использовании известного устройства, принятого за прототип, относится то, что в известном устройстве осуществляется такой режим нагружения исследуемого подшипника, при котором в зону контроля за время измерения попадают смежные с контролируемым тела качения. Указанный фактор существенно влияет на результат измерения диагностического параметра, снижая точность диагностирования.
Заявляемое изобретение решает задачу повышения точности диагностирования тел качения подшипников за счет исключения влияния качества поверхностей тел качения смежных с диагностируемым на результат измерения интегрального параметра режима смазки.
Указанный технический результат при осуществлении группы изобретений по объекту-способу достигается тем, что в известном способе диагностирования тел качения подшипников, заключающемся в измерении интегрального параметра режима смазки каждого тела качения при вращении с рабочей частотой одного из колец смазанного и нагруженного постоянной по величине радиальной нагрузкой подшипника и в оценке качества поверхности каждого тела по отклонениям значения измеренного для него параметра от наименьшего значения, согласно изобретению, при измерении интегрального параметра режима смазки тела качения изменяют направление действия радиальной нагрузки с частотой вращения сепаратора, совмещая это направление с центром тела качения.
Указанный технический результат при осуществлении группы изобретений по объекту-устройству достигается тем, что в известном устройстве для диагностирования тел качения подшипников, содержащем источник электрического напряжения, один полюс которого через формирователь импульсов и токосъемник подключен к валу контролируемого подшипникового узла, а другой полюс подключен к наружному кольцу контролируемого подшипника, счетчик, связанный с выходом временного селектора, к первому входу которого подключен выход формирователя импульсов, а ко второму - генератор опорной частоты, устройство нагружения, выполненное с возможностью кинематической связи с валом контролируемого подшипникового узла, а также датчик угла поворота сепаратора, расположенный в непосредственной близости от сепаратора контролируемого подшипника, и одновибратор, согласно изобретению, дополнительно введены блок управления нагружением, выход которого электрически связан со входом устройства нагружения, а вход подключен к выходу генератора с фазовой автоподстройкой частоты, первый вход которого соединен с выходом датчика угла поворота сепаратора, второй - с выходом блока задержки, подключенного входом к выходу одновибратора, причем устройство нагружения выполнено с возможностью изменения направления вектора радиальной нагрузки.
Заявленная группа изобретений соответствует требованию единства изобретений, поскольку группа разнообъектных изобретений образует единый изобретательский замысел, причем один из заявленных объектов группы - устройство для диагностирования тел качения подшипников предназначено для осуществления другого заявленного объекта группы - способа диагностирования тел качения подшипников, при этом оба объекта группы изобретений направлены на решение одной и той же задачи с получением единого технического результата.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленной группы изобретений как для объекта-способа, так и для объекта-устройства, позволил установить отсутствие аналогов как для способа, так и для устройства заявленной группы, характеризующихся признаками, тождественными всем существенным признакам способа и устройства, изложенным в формуле изобретения.
Сущность изобретения поясняется чертежами. На фиг.1 представлена схема устройства для осуществления способа диагностирования тел качения подшипников; на фиг.2 - пример реализации устройства нагружения; на фиг.3 - пример реализации блока задержки; на фиг.4 - временные диаграммы, поясняющие работу устройства; на фиг.5,6 - диаграммы, иллюстрирующие пример реализации способа диагностирования тел качения подшипников.
Способ осуществляют следующим образом.
Вращают одно из колец смазанного подшипника с рабочей частотой, нагружают подшипник постоянной по величине радиальной нагрузкой, изменяют направление действия радиальной нагрузки частотой вращения сепаратора, при этом измеряют значение интегрального параметра режима смазки каждого тела качения, совмещая направление действия радиальной нагрузки в каждом случае с центром диагностируемого тела качения, и оценивают качество поверхности каждого тела по отклонению измеренного для него значения интегрального параметра от наименьшего значения.
Внутреннее кольцо контролируемого подшипника 1 (фиг.1) установлено на валу 2, наружное - неподвижно в корпусе 3 подшипникового узла. Устройство для диагностирования тел качения подшипников содержит источник 4 электрического напряжения, один полюс которого через формирователь 5 импульсов и токосъемник 6 подключен к валу 2 контролируемого подшипникового узла, а другой полюс подключен к наружному кольцу контролируемого подшипника 1, счетчик 7, связанный с выходом временного селектора 8, к первому входу которого подключен выход формирователя 5 импульсов, а ко второму - генератор 9 опорной частоты, устройство 10 нагружения, выполненное возможностью кинематической связи с валом 2 контролируемого подшипникового узла, а также датчик 11 угла поворота сепаратора, расположенный в непосредственной близости от сепаратора контролируемого подшипника 1, блок 12 управления нагружением, выход которого электрически связан со входом устройства 10 нагружения, а вход подключен к выходу генератора 13 с фазовой автоподстройкой частоты (ФАПЧ), первый вход которого соединен с выходом датчика 11 угла поворота сепаратора, а второй - с выходом блока 14 задержки, подключенного входом к выходу одновибратора 15.
Устройство работает следующим образом.
Разрушения смазочной пленки при работе контролируемое подшипника сопровождаются резким уменьшением его электрического сопротивления, следствием чего является импульс тока в цепи, составленной последовательно соединенными токосъемником 6, формирователем 5 импульсов, источником 4 электрического напряжения и деталями контролируемого подшипника 1 (фиг.1). Длительность этого импульса равняется времени разрушения пленки. Формирователь 5 импульсов выдает импульс напряжения прямоугольной формы той же длительности с амплитудой, соответствующей логической единице. Каждый отдельный импульс с выхода формирователя 5 поступает на временной селектор 8, где заполняется импульсами генератора 9 опорной частоты, прошедшими через второй вход селектора 8. Счетчик 7 определяет общее число Nи импульсов, поступивших с генератора 9 за время измерения T, при этом его показания однозначно характеризуют параметр - нормированное интегральное время разрушения смазочной пленки (K): K=NиTг/T, где Tг - период импульсов генератора 10 опорной частоты.
Датчик 11 угла поворота сепаратора установлен в непосредственной близости от сепаратора контролируемого подшипника 1. В момент прохождения против датчика 11 одного из тел качения он вырабатывает импульс напряжения. Частота этих импульсов равна частоте вращения сепаратора, увеличенной в Z раз. Эти импульсы поступают на вход генератора 13 с ФАПЧ. Последний вырабатывает сигнал, частота которого кратна частоте вращения сепаратора, причем импульсы на выходе генератора 13 с ФАПЧ синхронизированы со входным сигналом. Таким образом, генератор 13 с ФАПЧ производит слежение за изменением частоты вращения сепаратора. Импульсы с выхода генератора 13 поступают на вход блока 12 управления нагружением, в результате чего последний формирует управляющее воздействие для устройства 10 нагружения, которое в свою очередь создает радиальную нагрузку на контролируемой подшипник 1, вектор которой изменяет свое направление с частотой вращения сепаратора и в процессе измерения диагностического параметра совмещает свое направление с центром одного из тел качения (диагностируемого тела качения).
Для проведения диагностирования следующего тела качения с помощью одновибратора 15 формируют импульс напряжения, который поступает на вход блока 14 задержки. Блок 14 задержки прекращает поступление импульсов с выхода генератора 13 с ФАПЧ на вход блока 12 управления нагружением на время, равное периоду следования импульсов с выхода датчика 11 угла поворота сепаратора. В результате направление вектора радиальной нагрузки в течение указанного времени не изменяется. Возобновление подачи импульсов на вход блока 12 управления нагружением совпадает во времени с моментом совмещения направления вектора радиальной нагрузки на центр следующего тела качения. Так как направление вектора нагрузки вновь начинает изменяться с частотой вращения сепаратора, то это совмещение с центром следующего тела качения поддерживается до подачи очередного импульса с выхода одновибратора 15. Так проводят Z измерений интегрального параметра режима смазки подшипника для каждого тела качения.
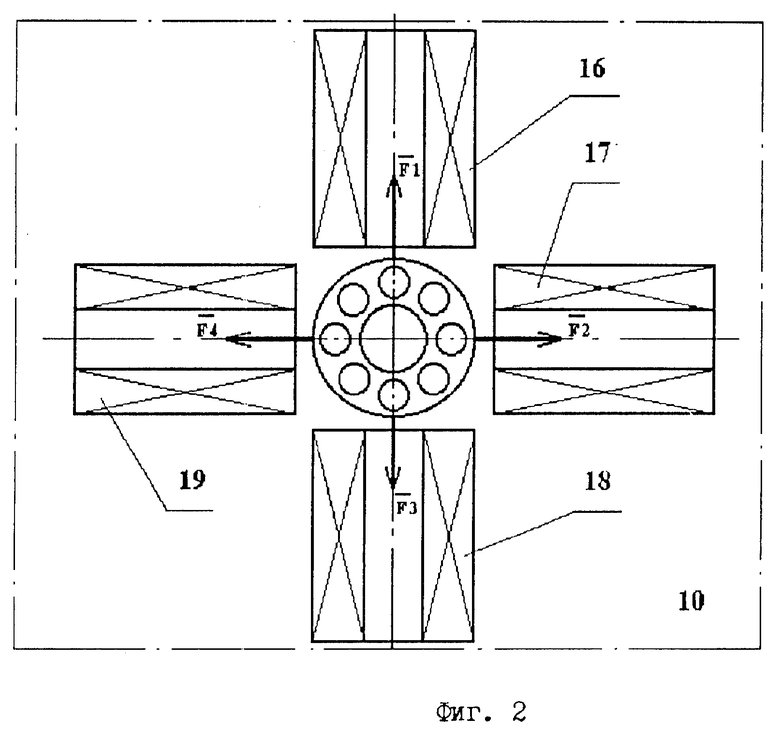
Устройство 10 нагружения может быть реализовано, например, с помощью четырех идентичных электромагнитов 16 - 19 постоянного тока (фиг. 2), причем взаимноперепендикулярные линии действия сил электромагнитов 16 - 19 постоянного тока перпендикулярны также и оси подшипника 1. сигналы, поступающие на обмотки электромагнитов 16 - 19 постоянного тока имеют вид:
Ii= I[1+sin(ωt+0,5πi)],
где
i - порядковый номер электромагнита;
I - амплитудное значение тока, определяемое требуемым значением радиальной нагрузки;
ω - требуемая частота циркуляции нагрузки;
t - текущее время.
Модуль вектора нагрузки Fi электромагнита постоянного тока пропорционален квадрату тока Ii в его обмотке /5/. Математический анализ показывает, что при выбранном виде управляющих сигналов значение модуля вектора суммарной от действия электромагнитов 16 - 19 постоянного тока нагрузки F= [(F1-F3)2+(F2-F4)] 0,5 является постоянным, а частота вращения нагрузки совпадает с частотой управляющих сигналом, формируемых блоком 12 управления нагружением.
Блок 12 управления нагружением может быть выполнен, например, в виде цифрового генератора сигналов на основе просмотровой таблицы (поиск элементов при помощи просмотра). Цифровая память блока 12 управления нагружением запрограммирована цифровыми значениями (выборками) сигналов, управляющих работой устройства 10 нагружения; аргументы управляющих сигналов выбираются через равноотстоящие угловые промежутки. Быстрый последовательный перебор адресов этой памяти позволяет получить колебание требуемой для управления устройством 10 нагружения формы, для этого считанные из памяти по каждому адресу цифровые значения (т.е. для последовательности угловых аргументов) подаются на цифро-аналоговые преобразователи /6/.
При вращении вала 2 на выходе датчика 11 угла поворота сепаратора формируются импульсы напряжения, частота которых равна частоте вращения сепаратора, увеличенной в Z раза. Эти импульсы поступают на вход генератора 13 с ФАПЧ. После захвата входного сигнала генератор 13 с ФАПЧ следит за изменением его частоты. При этом на выходе генератора 13 формируется меандр с частотой автоподстройки fвых=Nfвх, где fвх - частота импульсов на выходе датчика 11 угла поворота сепаратора, N - коэффициент деления частоты (N≥2, задается видом схемы подключения генератора 13). Эти импульсы поступают на вход блока 12 управления нагружением для осуществления последовательного перебора содержимого цифровой памяти.
Частота циркуляции нагрузки ω = 2πfсеп, где fсеп - частота вращения сепаратора, связана с частотой автоподстройки fвых генератора 13 с ФАПЧ. При угловом шаге дискретизации управляющих сигналов равном α (α - угловой шаг дискретизации, обусловленный требуемой точностью поддержания углового положения вектора радиальной нагрузки) за одни оборот сепаратора производится обращение к 360/α ячейкам цифровой памяти блока 12 управления нагружением, т.е. частота перебора содержимого памяти в 300/α раз больше fсеп: (fвых= 360fсеп/α). С другой стороны, fвых= Nfвх=NZfсеп. Таким образом, коэффициент деления N связан с шагом дискретизации α соотношением 360/α = NZ и определяется исходя из максимально допустимого значения α: N≥360/(αZ). Генератор 1 3 с ФАПЧ может быть реализован на интегральной микросхеме К564 ГГ1 /7/.
В качестве датчика 12 может использоваться, например, параметрический накладной электромагнитный преобразователь, включенный в мостовую схему /8/. Формирователь 5 импульсов может быть выполнен, например, на интегральном компараторе К 554 СА2. Временной селектор 8 выполняет функцию логического умножения "2И" /9/. В качестве генератора 9 опорной частоты и счетчика 7 могут использоваться блоки стандартного электронного частотомера, например, типа Ч3 - 34А.
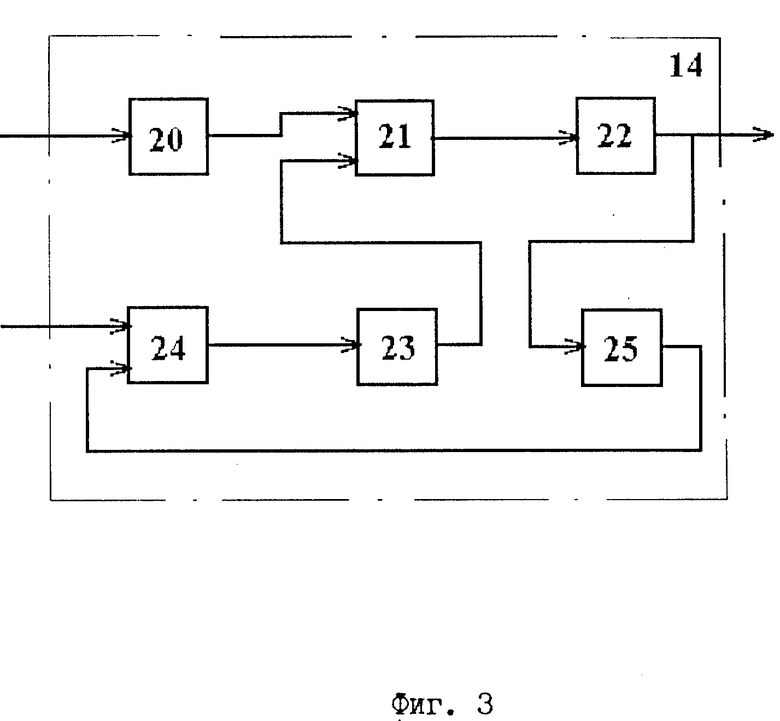
Блок 14 задержки может быть реализован, например, по схеме, представленной на фиг. 3, которая содержит одновибратор 20, вход которого подключен к выходу датчика 11 угла поворота сепаратора, а выход - к первому входу элемента 21 "И", выходом соединенного со входом триггера 22, выход которого подключен ко входу генератора 13 с ФАПЧ, при этом второй вход элемента 21 "И" соединен с выходом триггера 23, входом подключенного к выходу элемента 24 "ИЛИ", первый вход которого соединен с выходом одновибратора 15, второй подключен к выходу одновибратора 25, входом связанного с выходом триггера 21. Для реализации блока 14 задержки могут использоваться стандартные микросхемы серии К 155 /10/.
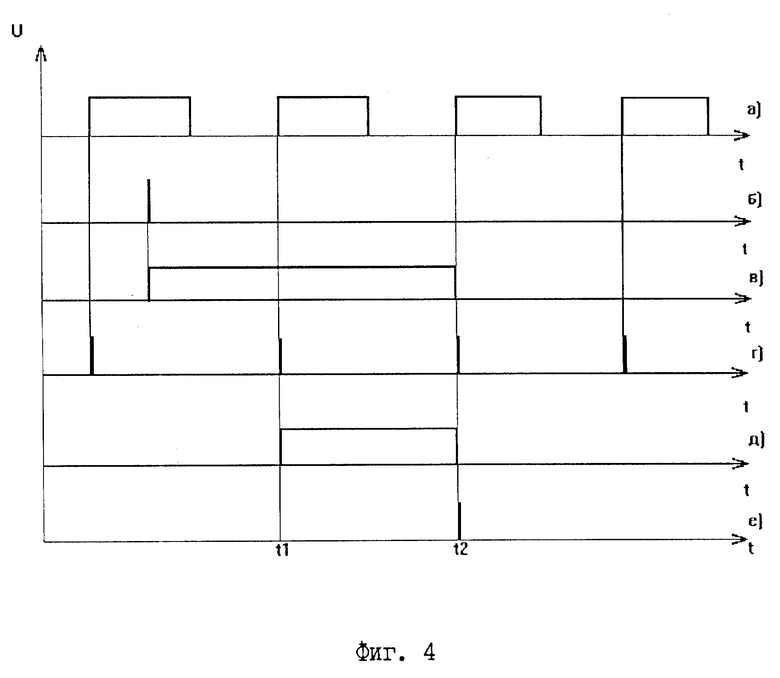
Для оценки качества поверхностей всех тел качения подшипника проводят Z измерений интегрального параметра режима смазки для Z тел качения. Для осуществления следующего измерения с помощью одновибратора 15 подают импульс напряжения на блок 14 задержки. Работу последнего иллюстрируют временные диаграммы (фиг. 4). На фиг. 4а показаны импульсы, поступающие с датчика 11 угла поворота сепаратора. При подаче импульса на первый вход элемента 24 "ИЛИ" с выхода одновибратора 15 (фиг. 4б) в любой момент времени происходит переключение триггера 23 (фиг. 4в): на его выходе появляется сигнал с амплитудой логической единицы. Одновибратор 20 формирует короткие импульсы по положительным фронтам импульсов, поступающих на его вход с выхода датчика 11 угла поворота сепаратора (фиг. 4 г). При наличии логической единицы на втором входе элемента 21 "И" с приходом импульса с выхода одновибратора 20 на его первый вход в момент времени t1 происходит переключение триггера 22 (фиг. 4д) из состояния логического нуля в состояние логической единицы. С приходом следующего импульса с выхода одновибратора 20 в момент времени t2 происходит переключение триггера 22 в состояние логического нуля. Одновибратор 25 по спаду импульса формирует скачок напряжения (фиг. 4е), поступающий через второй вход элемента 24 "ИЛИ" на вход триггера 23, производя тем самым его переключение в состояние логического нуля, т.е. в момент времени t2 блок 14 задержки переходит в исходное состояние. Работа блока 14 задержки приводит к тому, что на его выходе (выход триггера 22) в момент t1 - t2 присутствует сигнал с амплитудной логической единицы. Он синхронизирован с выходными импульсами датчика 11 угла поворота сепаратора и его длительность равна их периоду. Этот сигнал поступает на второй вход генератора 13 с ФАПЧ - вход блокировки "запрет", прерывая генерацию импульсов. Последнее приводит к тому, что за время t1 - t2 импульсы на входе блока 12 управления нагрузкой отсутствуют, перебора содержимого цифровой памяти не происходит, текущее направление вектора радиальной нагрузки не меняется. Так производится перемещение направления вектора радиальной нагрузки на центр следующего диагностируемого тела качения. Производя Z задержек, производят диагностирование всех тел качения контролируемого подшипника.
Разрушения смазочной пленки дефектами рабочих поверхностей деталей подшипника происходят в нагруженных зонах контактов, и с ростом нагрузки возрастает вероятность разрушения пленки. За время каждого измерения под нагрузкой будет находиться одно и то же диагностируемое тело качения, причем величина нагрузки на диагностируемое тело качения за время измерения остается неизменной, равной номинальному значению. Каждая точка дорожки качения вращающегося кольца попадает в зону нагружения много раз за время измерения, при этом нагрузку будет воспринимать один и тот же для всех измерений участок дорожки качения неподвижного кольца. Это приводит к усреднению влияния качества неконтролируемых деталей подшипника на результат каждого измерения.
Таким образом, результат каждого измерения интегрального параметра содержит постоянную для всех измерений составляющую, значение которой определяется качеством дорожек неподвижного и вращающегося колец, и переменную составляющую, характеризующую качество поверхности диагностируемого тела, находящегося за время данного измерения в зоне нагружения. Очевидно, что наименьшее значение интегрального параметра определяется в основном постоянной составляющей. Отклонение же каждого значения параметра от наименьшего определяется переменной составляющей, следовательно характеризует качество поверхности соответствующего тела качения.
Постоянное совмещение направления вектора радиальной нагрузки с центром диагностируемого тела качения, согласно предлагаемому изобретению, характеризует такой режим нагружения, при котором смежные тела качения не попадают за время измерения в зону контроля, т.е. их влияние на результат измерения диагностического параметра для данного тела качения исключается. Таким образом, достигается цель заявляемой группы изобретений: точность диагностирования тел качения повышается.
Изложенные сведения показывают, что при использовании заявленной группы изобретений выполнена следующая совокупность условий:
- средство, воплощающее заявленное изобретение при его осуществлении предназначено для использования в промышленности, а именно для диагностирования поверхностей тел качения подшипников в узлах в процессе эксплуатации и ремонта машин и механизмов;
- для заявленной группы изобретений в том виде, как она охарактеризована в независимых пунктах изложенной формулы изобретения, подтверждена возможность его осуществления с помощью вышеописанных в заявке и известных до даты приоритета средств и методов.
Следовательно, заявленная группа изобретений соответствует условию "промышленная применимость".
Пример.
Проводили диагностирование тел качения шарикоподшипника 208 (ГОСТ 8338 - 75). Вращали с рабочей частотой 1000 мин-1 одно из колец контролируемого подшипника, смазанного материалом состава: 50% масла МС-20 и 50% трансформаторного масла. Нагружали контролируемый подшипник постоянной по величине радиальной нагрузкой 300 Н, изменяли направление действия радиальной нагрузки с частотой вращения сепаратора, измеряли значение интегрального параметра режима смазки каждого тела качения, совмещая направление действия радиальной нагрузки с центром диагностируемого тела качения и оценивали качество поверхности каждого тела по отклонению измеренного для него значения интегрального параметра от наименьшего значения.
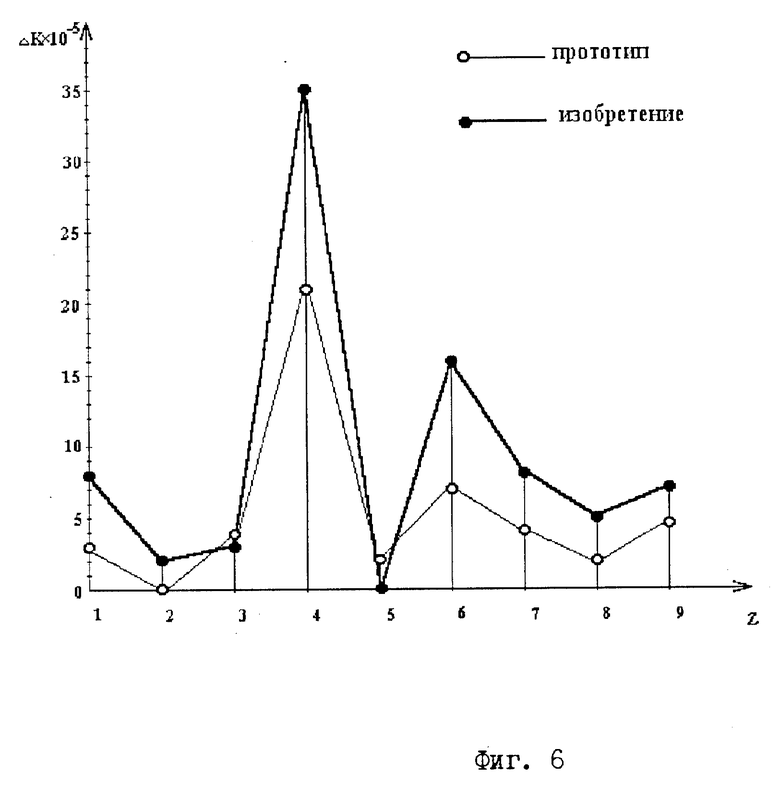
Результаты диагностирования тел качения представлены диаграммами. Для иллюстрации эффективности предложенных способа диагностирования тел качения и устройства для его осуществления на диаграммах также представлены результаты диагностирования тел качения способом и устройством, принятыми за прототип.
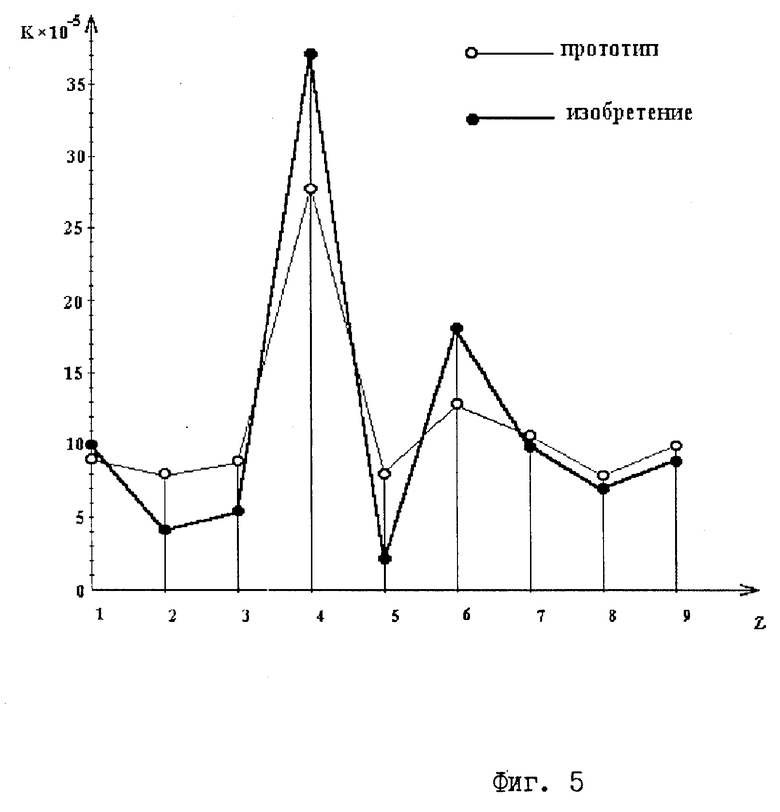
На фиг. 5 показаны значения диагностического параметра - нормированного интегрального времени разрушения смазочной пленки для каждого из тел качения, которым присвоены условные порядковые номера n от 1 до 9, на фиг. 6 представлены значения отклонений параметра от наименьшего значения.
Анализ результатов диагностирования тел качения подшипника предложенными способом и устройством показал существенное возрастание значений диагностического параметра для тел качения с условными порядковыми номерами 4 и 6. Значения нормированного интегрального времени разрушения смазочной пленки для них составили соответственно К4=37•10-5 и К6=18•10-5. При наименьшем значении диагностического параметра Kmin=K5=2•10-5 (для пятого тела качения) отклонения интегрального параметра режима смазки составили ΔK4= 35×10-5 и ΔK6= 16×10-5. На основании результатов диагностирования был сделан вывод о неудовлетворительном качестве четвертого и шестого тел качения.
При диагностировании тел качения способом и устройством, принятыми за прототип, за счет взаимного влияния смежных тел качения на результат диагностирования получена неточная оценка качества поверхности тела качения с условным порядковым номером 5 (K5=8•10-5). Значение диагностического параметра для этого тела качения завышено, что привело к завышению наименьшего значения. При этом в качестве наименьшего значения диагностического параметра было принято значение Kmin=K2=6•10-5, которое наблюдалось для тела качения с условным порядковым номером 1. Конечным результатом является незначительное отклонение интегрального параметра режима смазки от наименьшего значения для шестого тела качения (ΔK6= 7×10-5). . Таким образом, было выявлено только одно тело качения с неудовлетворительным качеством поверхности (четвертое), а качество поверхности шестого тела было принято удовлетворительным.
После диагностирования подшипник разобрали и изучили поверхности тел качения под микроскопом. На шестом теле качения была обнаружена раковина со средним диаметром 0,45 мм, что подтвердило достоверность и эффективность предлагаемых способа и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИРОВАНИЯ НЕПОДВИЖНОГО КОЛЬЦА ПОДШИПНИКА КАЧЕНИЯ В ДВУХОПОРНОМ УЗЛЕ | 1997 |
|
RU2124190C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2098789C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2110053C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1999 |
|
RU2164343C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1998 |
|
RU2153156C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1998 |
|
RU2154264C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2093810C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ПОДШИПНИКОВ КАЧЕНИЯ | 1998 |
|
RU2168712C2 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ПОДШИПНИКОВ КАЧЕНИЯ | 1996 |
|
RU2113699C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА КОЛЕЦ ПОДШИПНИКА КАЧЕНИЯ | 2005 |
|
RU2282171C1 |
Изобретение относится к области измерительной техники и может быть, преимущественно, использовано для диагностирования поверхностей тел качения подшипников в узлах в процессе эксплуатации и ремонта машин и механизмов. Изобретение направлено на повышение точности диагностирования тел качения. Объектами изобретения являются способ диагностирования тел качения подшипников и устройство для его осуществления. Способ заключается в том, что вращают одно из колец, нагружают подшипник постоянной по величине радиальной нагрузкой, изменяют направление действия радиальной нагрузки, при этом измеряют значение интегрального параметра режима смазки каждого тела качения, совмещая направление действия радиальной нагрузки с центром диагностируемого тела качения, и оценивают качество поверхности тела по отклонению измеренного для него значения интегрального параметра. Устройство содержит источник электрического напряжения, один полюс которого через формирователь импульсов и токосъемник подключен к валу подшипникового узла, а другой полюс подключен к наружному кольцу подшипника, счетчик, связанный с выходом временного селектора, генератор опорной частоты, устройство нагружения, выполненное с возможностью кинематической связи с валом подшипникового узла, а также датчик угла поворота сепаратора, одновибратор; кроме того, в него дополнительно введен блок управления нагружением. 2 с.п.ф-лы, 6 ил.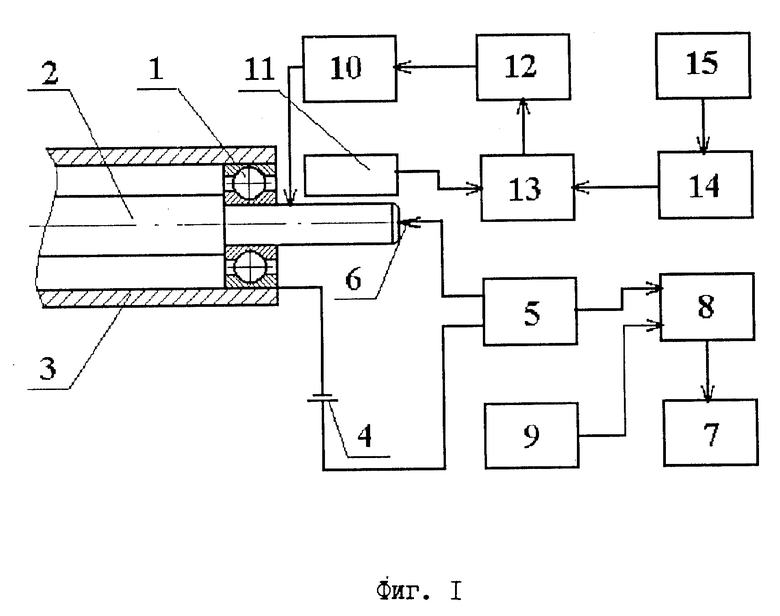
| Способ диагностики тел качения подшипников | 1985 |
|
SU1272142A1 |
| SU 671489, 07.08.79 | |||
| Устройство для контроля состояния подшипников качения | 1984 |
|
SU1164569A1 |
| Способ определения работоспособности подшипников качения и устройство для его осуществления | 1981 |
|
SU1002873A1 |
| Устройство для диагностики подшипников качения | 1982 |
|
SU1041871A1 |
| Способ оценки качества шарикоподшипников | 1983 |
|
SU1118883A1 |
