,«

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1271951A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1988 |
|
SU1579956A2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1416628A2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1980 |
|
SU994651A2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ АВТОГРЕЙДЕРА | 2006 |
|
RU2327011C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
| Система управления бульдозерным агрегатом | 1980 |
|
SU870614A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1979 |
|
SU881225A1 |
Изобретение относится к землеройно-транспортной технике и предназначено для автоматизации процесса разработки грунта бульдозерными агрегатами. Цель изобретения - повышение точности управления рабочим органом машины. Для этого устройство содержит блоки измерения действительной скорости 1 машины, силы тяги (СТ) 2 и производной тяговой мощности (ТМ) 11, блок 3 умножения, блок 5 сравнения, усилители 6 и 14, запоминающий блок 4, блоки переключения режимов работы 9 и коммутации 10, бесконтактный управляемый ключ 12, функциональный преобразователь 13 и каскады заглубления 7 и выглубления 8 рабочего органа. По цепи: блок измерения действительной скорости 1 машины, блок 3 умножения, блоки переключения режимов работы 9 и коммутации 10, блок измерения производной ТМ 11, функциональный преобразователь 12 и усилитель 6 осуществляется поиск режима максимума ТМ, а по цепи: блок измерения СТ 2, запоминающий блок 4, блок 5 сравнения и усилитель 14 - стабилизация тягового усилия, соответствующего экстремуму ТМ. При этом за счет определенного выполнения блока измерения производной ТМ 11 исключается влияние на результаты измерения помех измерителей скорости СТ. Это достигается путем усреднения результатов измерения ТМ на каждом интервале измерения и путем определения производной как приращения ТМ на каждом фильтрованном интервале времени. 3 ил.
Фаг.1
3151
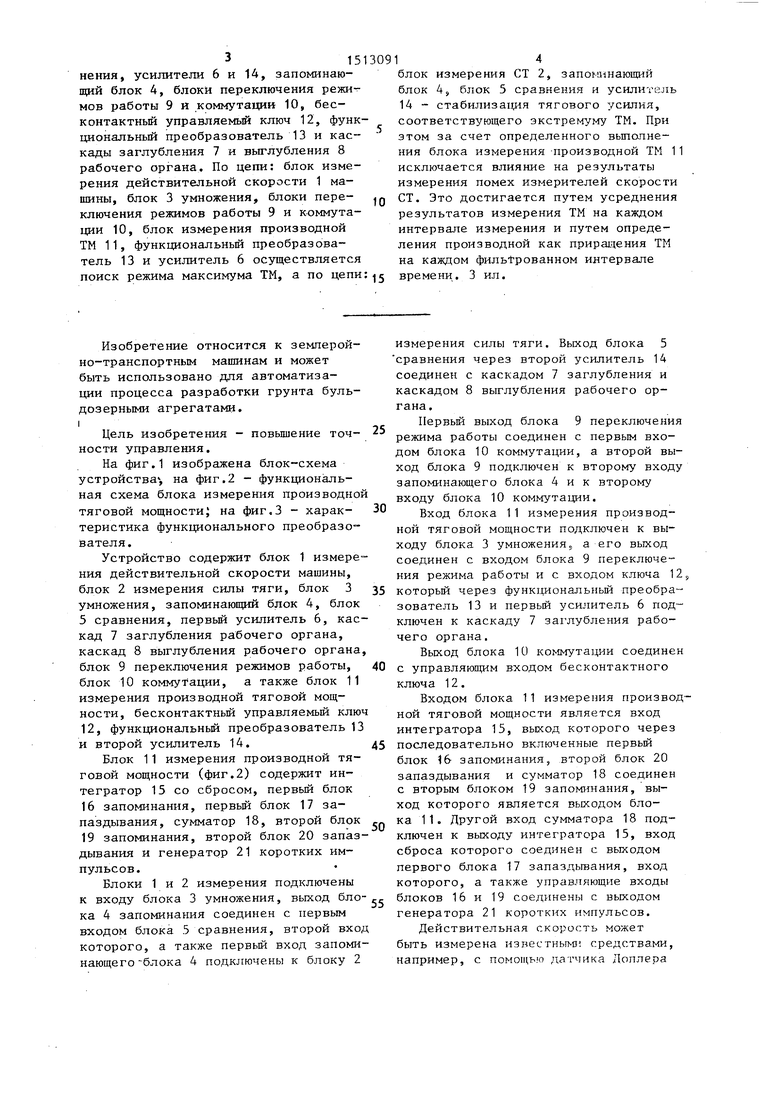
нения, усилители 6 и 14, запоминающий блок 4, блоки переключения режи- нов работы 9 и коммутации 10, бес- контактньм управляемьй ключ 12, функциональный преобразователь 13 и каскады заглубления 7 и выглубления 8 рабочего органа. По цепи: блок измерения действительной скорости 1 машины, блок 3 умножения, блоки пере- ключения режимов работы 9 и коммута- изии 10, блок измерения производной ТМ 11, функциональньй преобразователь 13 и усилитель 6 осуществляется поиск режима максимума ТМ, а по цепи:
Изобретение относится к зеиперой- но-транспортным машинам и может быть использовано для автоматизации процесса разработки грунта бульдозерными агрегатами.
Цель изобретения - повышение точ- ности управления.
На фиг.1 изображена блок-схема устройства , на фиг.2 - функциональная схема блока измерения производной тяговой мощности; на фиг.З - харак- теристика функционального преобразователя.
Устройство содержит блок 1 измерения действительной скорости машины, блок 2 измерения силы тяги, блок 3 умножения, запоминающий блок 4, блок 5 сравнения, первьй усилитель 6, каскад 7 заглубления рабочего органа, каскад 8 выглубления рабочего органа, блок 9 переключения режимов работы, блок 10 коммутации, а также блок 11 измерения производной тяговой мощности, бесконтактный управляемьй ключ 12, функциональньй преобразователь 13 и второй усилитель 14.
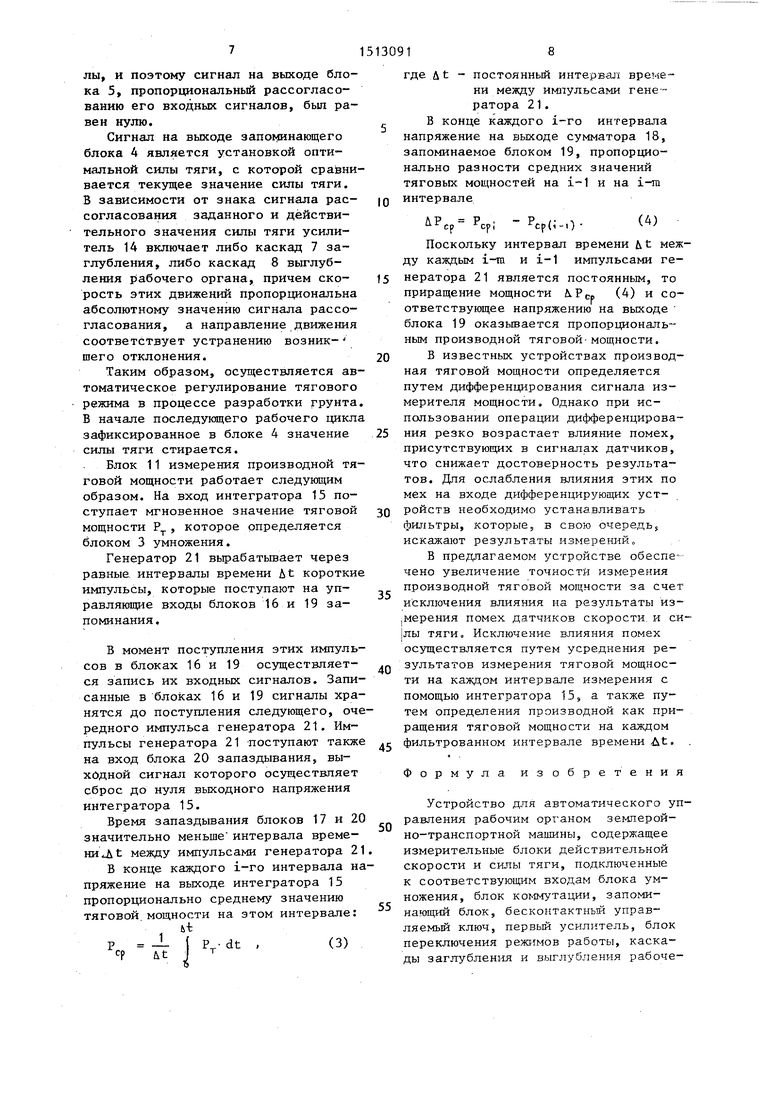
Блок 11 измерения производной тяговой мощности (фиг.2) содержит интегратор 15 со сбросом, первьй блок 16 запоминания, первьй блок 17 запаздывания, сумматор 18, второй блок 19 запоминания, второй блок 20 запаздывания и генератор 21 коротких импульсов.
Блоки 1 и 2 измерения подключены к входу блока 3 умножения, выход блока 4 запоминания соединен с первым входом блока 5 сравнения, второй вход которого, а также первьй вход запоминающего -блока 4 подключены к блоку 2
14
блок измерения СТ 2, запоминающий блок 4;, блок 5 сравнения и усилитель 14 стабилизация тягового усилия, соответствующего экстремуму ТМ. При этом за счет определенного выполнения блока измерения -производной ТМ 1 исключается влияние на результаты измерения помех измерителей скорости СТ. Это достигается путем усреднения результатов измерения ТМ на каждом интервале измерения и путем определения производной как приращения ТМ на каждом фильтрованном интервале времени,. 3 ил.
измерения силы тяги. Выход блока 5 сравнения через второй усилитель 14 соединен с каскадом 7 заглубления и каскадом 8 выглубления рабочего органа.
Первьй выход блока 9 переключения режима работы соединен с первым входом блока 10 коммутации, а второй выход блока 9 подключен к второму входу запоминающего блока 4 и к второму входу блока 10 коммутации.
Вход блока 11 измерения производной тяговой мощности подключен к выходу блока 3 умножения5 а его выход соединен с входом блока 9 переключения режима работы и с входом ключа 12 которьй через функциональньй преобразователь 13 и первьй усилитель 6 подключен к каскаду 7 заглубления рабочего органа.
Выход блока 10 коммутации соединен с управляющим входом бесконтактного ключа 12.
Входом блока 11 измерения производной тяговой мощности является вход интегратора 15, выход которого через последовательно включенные первьй блок 16 запоминания, второй блок 20 запаздывания и сумматор 18 соединен с вторым блоком 19 запоминания, выход которого является выходом блока 11. Другой вход сумматора 18 подключен к выходу интегратора 15, вход сброса которого соединен с выходом первого блока 17 запаздывания, вход которого, а также управляющие входы блоков 16 и 19 соединены с выходом генератора 21 коротких импульсов.
Действительная скорость может быть измерена известным средствами, например, с помощью датчика Доплера
II
или применением так называемого пятого колеса. Сила тяги может быть измерена, например, с помощью тензо- метрических датчиков.
Блок 9 переключения режимов работы осуществляет следукяций алгоритм управления при наличии на его входе сигнала, соответствующего возрастанию тяговой мощности, т.е. положительному знаку производной тяговой мощности, либо сигнала, равного нулю. На выходе блока 9 имеется положитель- ньй сигнал. При убывании тяговой мощности, т.е. при наличии на входе блока 9 сигнала, соответствующего отрицательному знаку производной тяговой мощности, на выходе блока 9 имеется отрицательнд 1Й сигнал.
В качестве блока 10 используется бесконтактное реле.
Устройство работает следующим образом.
Блоки 1,3 и 9-14 образуют цепь поиска режима максимума тяговой мощности. Блоки 2 и 4-6 образуют цепь стабилизации тягового усилия, соответствующего экстремуму тяговой мощности.
В процессе начального заглубления рабочего органа на входе блока 9 переключения режима работы имеется положительньй сигнал. Согласно алгоритму режима работы этого блока на его выходе также появляется положи- тельньй сигнал, которьй, поступая на первьй вход блока 10 коммутации, включает его, а тот в свою очередь подает сигнал на управляющий вход ключа 12. Этот ключ замыкается и подключает к выходу блока 11 функцио- нальньй преобразователь 13 и второй усилитель 14, который включает кас кад 7 заглубления рабочего органа.
Напряжение на входе функционального преобразователя 13 и„ пропорционально производной.тяговой мощности Р
1513091
10
где К - коэффициент пропорциональности ,
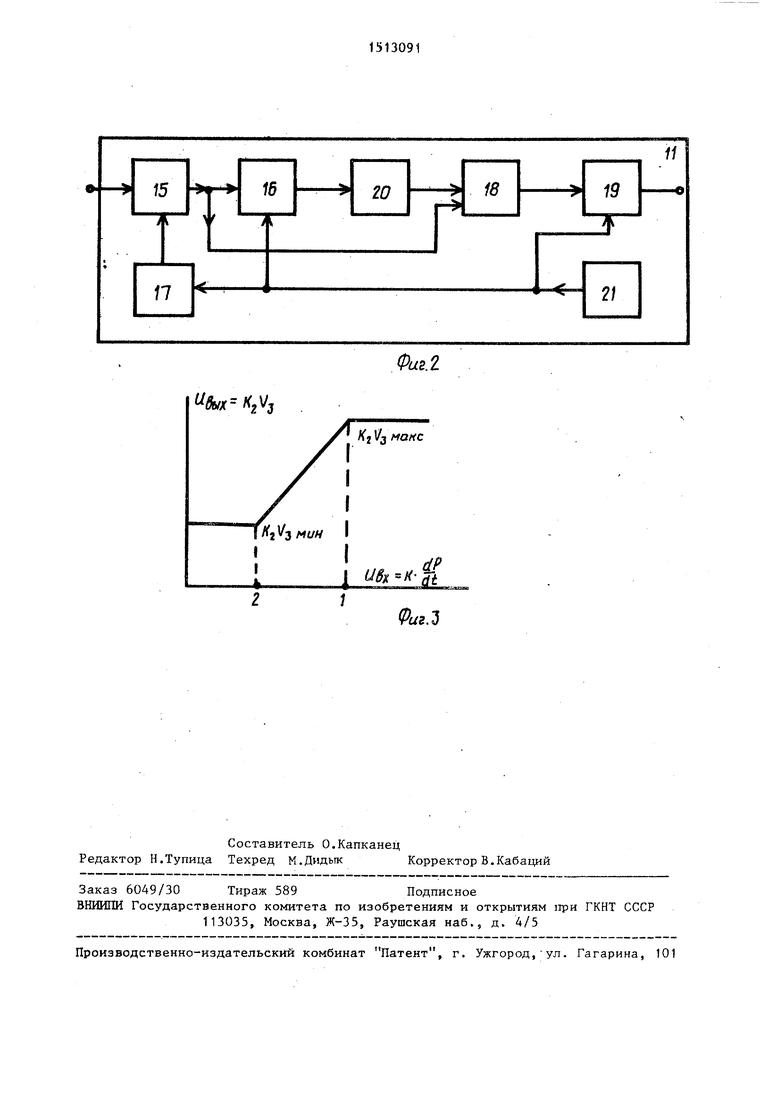
Зависимость между напряжениями и ьх преобразователя 13 определяется характеристикой, приведенной на фиг.З.
В начале процесса поиска, когда значение производной велико, на выходе преобразователя 13 имеется максимальное выходное напряжение и соответствующая этому напряжению максимальная скорость заглубления ра- .бочего органд V, х акс15
на20
При снижении, по мере заглубления
л dPr рабочего органа,производной-j-- ,
чиная с точки 1 характеристики (фиг.З), значение скорости заглубления V,
но снижению производной
уменьшается пропорциональdPr
При .приближении к зоне экстре- 25 мальной мощности, когда значение
dPrо
J достигает точки 2 характеристики (фиг.З), усиливается минимальная
6 мин
35
и
В
К,
dt
где
К - коэффициент пропорционально.сти.
Скорость заглубления рабочего органа в процессе поиска экстремума тяговой мощности Vj пропорциональна сигналу на выходе функционального преобразователя 13
V, K,jUg,,, ,
скорость заглубления V,
30 Описанное регулирование скорости заглубления рабочего органа в функции степени отключения параметров процесса копания от оптимальньк обеспечивает повышение точности определения оптимальной силы тяги, поскольку в зоне, близкой к оптимальной, имеет место минимальная скорость заглубления рабочего органа и, следовательно, незначительное изменение во вре-
Q мени силы тяги.
Повышение точности определения оптимальной силы тяги позволяет увеличить производительность бульдозера.
В момент появления на выходе блока 11 отрицательного сигнала сигнал на выходе блока 9 также становится отрицательным, в блоке 4 происходит запоминание имеющегося в данньй момент значения силы тяги, при этом блок 10
50 через ключ 12 отключает каскад 7 заглубления от цепи поиска экстремальной мощности вплоть до следукщего рабочего цикла.
После завершения режима поиска экстремума тяговой мощности начинает работать цепь стабилизации, которая на этапе поиска не функционировала, ,так как на оба входа блока 5 (2) сравнения поступали одинаковые сигна45
(1)
55
13091
10
где К - коэффициент пропорциональности ,
Зависимость между напряжениями и ьх преобразователя 13 определяется характеристикой, приведенной на фиг.З.
В начале процесса поиска, когда значение производной велико, на выходе преобразователя 13 имеется максимальное выходное напряжение и соответствующая этому напряжению максимальная скорость заглубления ра- .бочего органд V, х аксна
При снижении, по мере заглубления
л dPr рабочего органа,производной-j-- ,
чиная с точки 1 характеристики (фиг.З), значение скорости заглубления V,
но снижению производной
уменьшается пропорциональdPr
При .приближении к зоне экстре- мальной мощности, когда значение
dPrо
J достигает точки 2 характеристики (фиг.З), усиливается минимальная
6 мин
,
ание ргана пара тимал ности яги, мальн ость след енени
лы, и поэтому сигнал на выходе блока 5, пропорциональньй рассогласованию его входных сигналов, был равен нулю.
Сигнал на выходе запоминающего блока А является установкой оптимальной силы тяги, с которой сравнивается текущее значение силы тяги, В зависимости от знака сигнала рассогласования заданного и действительного значения силы тяги усилитель 14 включает либо каскад 7 заглубления, либо каскад 8 выглуб- ления рабочего органа, причем скорость этих движений пропорциональна абсолютному значению сигнала рассогласования, а направление движения соответствует устранению возник- шего отклонения.
Таким образом, осуществляется автоматическое регулирование тягового режима в процессе разработки грунта. В начале последующего рабочего цикла зафиксированное в блоке 4 значение силы тяги стирается.
Блок 11 измерения производной тяговой мощности работает следующим образом. На вход интегратора 15 поступает мгновенное значение тяговой мощности Р, которое определяется блоком 3 умножения.
Генератор 21 вырабатывает через равные интервалы времени it короткие импульсы, которые поступают на управляющие входы блоков 16 и 19 запоминания.
В момент поступления этих импульсов в блоках 16 и 19 осуществляется запись их входных сигналов. Записанные в блоках 16 и 19 сигналы хранятся до поступления следующего, очередного импульса генератора 21. Импульсы генератора 21 поступают также на вход блока 20 запаздывания, вы- хйдной сигнал которого осуществляет сброс до нуля выходного напряжения интегратора 15.
Время запаздывания блоков 17 и 20 значительно меньше интервала време- между импульсами генератора 21
В конце каждого i-ro интервала напряжение на выходе интегратора 15 пропорционально среднему значению тяговой мощности на этом интервале:
Р -L. 1 р
ср it I
dt
(3)
где дt - постоянньш интервал времени между импульсами генератора 21.
В конце каждого i-ro интервала напряжение на выходе сумматора 18, запоминаемое блоком 19, пропорционально разности средних значений тяговых мощностей на i-1 и на i-ra интервале
Р.р Ь-ср
-Рср(-0- ( Поскольку интервал времени fit между каждым i-m и i-1 импульсами генератора 21 является постоянным, то
0
5
0
5
0
5
0
5
приращение мощности Р|
f
(4) и соответствующее напряжению на выходе блока 19 оказьшается пропорциональным производной тяговой-мощности,
в известных устройствах производная тяговой мощности определяется путем дифференцирования сигнала измерителя мощности. Однако при использовании операции дифференцирования резко возрастает влияние помех, присутствующих в сигналах датчиков, что снижает достоверность результатов. Для ослабления влияния этих по мех на входе дифференцирующих устройств необходимо устанаБЛивать фильтры, которые, в свою очередь искажают результаты измерений„
В предлагаемом устройстве обеспечено увеличение точности измерения производной тяговой мощности за счет исключения влияния на результаты измерения помех датчиков скорости, и силы тяги. Исключение влияния помех осуществляется путем усреднения результатов измерения тяговой мощности на каждом интервале измерения с помощью интегратора 15, а также путем определения производной как приращения тяговой мощности на каждом фильтрованном интервале времени At.
Формула изобретения
Устройство для автоматического управления рабочим органом земперой- но-транспортной машины, содержащее измерительные блоки действительной скорости и силы тяги, подключенные к соответствующим входам блока умножения, блок коммутации, запоминающий блок, бесконтактньй управ- ляемьй ключ, первый усилитель, блок переключения режимов работы, каскады заглубления и выглубления рабочего органа, отличающееся тем, что, с целью повьшения точности управления, оно снабжено блоком сравнения, вторым усилителем, функциональным преобразователем, блоком измерения производной тяговой мощности, состоящим из генератора коротких импульсов, интегратора, двух блоков запоминания, двух блоков запаз- дывания и сумматором, причем выход генератора соединен с первыми входами первого и второго блоков запоминания и входом первого блока запаздывания, выход которого соединен с первым входом интегратора, вькод интегратора связан с вторым входом первого блока запоминания и первым входом сумматора, а выход первого блока запоминания подключен через второй блок запаздывания к второму входу сумматора, выход которого соединен с вторым входом второго блока запоминания, при этом выход последнего соединен с входом блока пере- ключения режимов работы и входом бесконтактного управляемого ключа.
выход которого через последовательно соединенные функциональный преобразователь и первый усилитель соединен с каскадом заглубления рабочего органа, а выход блока умноже НИЛ соединен с вторым выходом интегратора, первьй выход блока переключения режимов работы связан с одним из входов блока ког мутации, а второй выход блока переключения режимов работы связан с другим входом блока коммутации и первым входом запоминающего блока, выход блока коммутации подключен к управляющему входу бесконтактного управляемого ключа, измерительный блок силы тяги соединен также с вторым входом запоминающего блока и с одним из входов блока сравнения, к другому входу которого подключен выход запоминающего блока, выход блока сравнения связан с входом второго усилителя, два выхода которого соединены соответственно с каскадами выглубления и заглубления рабочего органа.
I I
I I1 US,
Фиг.2
/fjl/д WO/fC
(Puz.
| Устройство для регулирования рабочего режима землеройно-транспортной машины | 1978 |
|
SU726278A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
