1
Изобретение относится к автоматизации рабочих процессов землеройно-транспортных машин (ЗТМ), а именно к устройству для автоматического управления рабочим органом ЗТМ в режиме максимума тяговой мощности.
По основному авт. св. Я 881225 известно устройство для автоматического управления рабочим органом ЗТМ, включаюьцее измерительные блоки силы тяги и действительной скорости движения машины, умножитель измеренных величин скорости и силы тяги, выделяющий сигнал пропорциональной тяговой мощности колесного движителя, к входу которого подключены выходы измерительных блоков, блоки определения знака производной тяговой мощности и силы тяги, формирующих сигналы «плюс, «минус, «равно нулю, трехпозиционный релейный элемент, связанный с выходными каскадами выглубления и заглубления, рабочего органа, к входам которого подключены выходы блоков определения знака производной, к входам которых подключены выходы умножителя и изме рительного блока силы тяги 1.
Однако в широком диапазоне изменения грунтовых условий и влияния инерционных сил движущихся масс машины устройство не обеспечивает необходимой стабильности управления, полного исполь5 зования потенциальных тяговых качеств колесного движителя, а также устойчивую работу ЗТМ. Воздействие указанных факторов приводит к ложным срабатываниям автоматического устройства и рабочий орган ЗТМ или выглубляется до начальногр значения, или заглубляется до ЮО /о-ного буксования колесного движителя, что принуждает оператора вмешиваться в процесс управления рабочим органом машины и приводит к росту производительных потерь времени.
Цель изобретения - повышение надежности и эффективности управления в широком диапазоне изменения грунтовых условий.
Поставленная цель достигается тем, что
20 устройство снабжено двумя компараторами и последовательно соединенными логическими элементами НЕ н И, причем к входу первого компаратора подключен измерительный блок действительной скорости
машины, а к выходу - вход логического элемента НЕ и третий вход релейного элемента, к четвертому входу которого подключен через логический элемент И выход второго компаратора, вход которого соединен с выходом измерительного блока силы тяги.
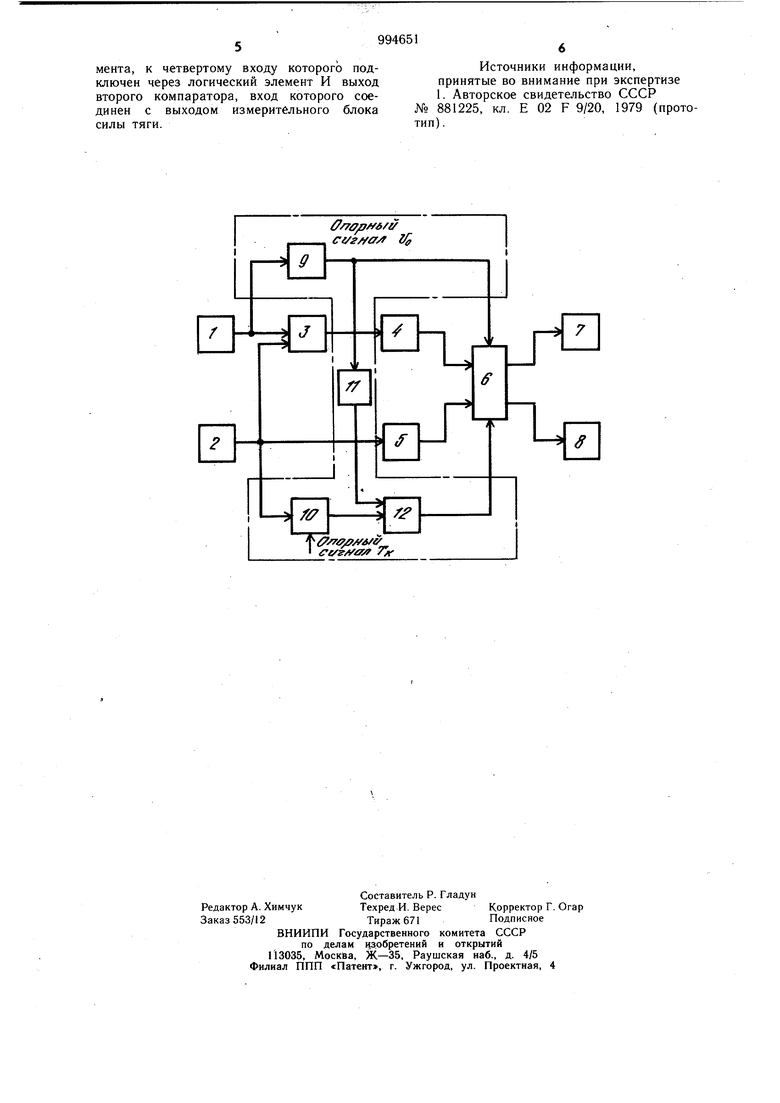
На чертеже представлена блок-схема предлагаемого устройства.
Устройство для автоматического управления рабочим органом землеройно-транспортной машины состоит из измерительных блоков 1 и 2 действительной скорости движителя и силы тяги машины, умножителя 3 измеренных величин скорости и силы тяги, выделяющего сигнал, пропорциональный тяговой мош,ности колесного движителя, блоков 4 и 5 определения знаков производной тяговой мош,ности и силы тяги, формируюший сигналы «плюс, «минус, «равно нулю, трехпозиционного релейного элемента 6 с выходными каскадами выглубления 7 и заглубления 8, компараторов 9 и 10, логических элементов 11 НЕ и 12 И.
Выходы измерительных блоков 1 и 2 подключены к входам умножителя и соответственно к входам первого и второго компараторов, выходы умножителя 3 и измерительного блока 2 подключены к входам блоков определения знаков производной тяговой мош,ности и силы тяги, выходы которых подключены к двум входам трехпозиционного релейного элемента, к двум другим входам которого подключены выход первого компаратора 9 непосредственно и выход второго компаратора 10 через логический элемент И, к второму входу которого подключен логический элемент 11 НЕ, к входу которого подключен выход первого компаратора 9.
Устройство работает следуюш,им образом.
При включении автоматического управления рабочим органом с измерительных блоков 1 и 2 непрерывные сигналы, пропорциональные действительной скорости движения и свободной силы тяги ЗТМ поступают на компараторы 9 и 10, которые сравнивают их с опорными. На выходе компаратора 9 появляется сигнал, равный нулю, так как действительная скорость есть, а на компараторе 10 - единице, так как рабочий орган выглублен. Полученные сигналы с компараторов поступают: первый - через логический элемент 11 НЕ, а второй - непосредственно на входы логического элемента 12 И, в результате на его выходе формируется сигнал, равный единице, который воздействует на трехпозиционный релейный элемент 6, в результате чего включается каскад .заглубления. В случае, когда сигнал действительной скорости движения ЗТМ меньше .опорного на выходе
компаратора 9, появляется сигнал, равный единице, который аналогичным образом, как и в первом случае воздействует на трехпозиционный релейный элемент 6 и включается каскад выглубления. Когда
на выходах компараторов 9 и 10 образуются сигналы, равные нулю, автоматическое управление передается на поиск максимума тяговой мощности с измерительных блоков 1 и 2 непрерывные сигналы, пропорциональные действительной -скорости и свободной силы тяги ЗТМ, поступают на множитель 3, который производит умножение и выделяет сигнал, пропорциональный тяговой мощности колесного движителя. Полученные сигналы тяговой мощности и свободной силы тяги раздельно поступают на соответствующие блоки 4 и 5 определения знака производной, на выходах которых формируются сигналы «плюс, «минус, «равно нулю, и подаются на входы трехпозиционного релейного элемента, последний сравнивает их, если знаки производных тяговой мощности и силы тяги совпадают, включается каскад заглубления, в противном случае - каскад выглубления, если значение производной
5 тяговой мощности достаточно близко к нулю, то оба каскада выключаются, максимум тяговой мощности найден, ЗТМ переходит на установившийся режим работы. При изменении -, словий работы машины процесс поиска максимума тяговой мощности пов0 торяется снова. Если же рабочий орган в результате ложных срабатываний автоматического устройства поиска максимума будет выглублен или заглублен до полной остановки ЗТМ, управление осуш.ествляется по указанной схеме.
Предлагаемое изобретение увеличивает эксплуатационную производительность машины за счет уменьшения непроизводительных потерь рабочего времени ЗТМ при выгQ лублении и заглублении рабочего органа, снижает износ силовой установки, повышает ее надежность и устойчивость в результате более продолжительной работы машины на установившемся режиме.
Формула изобретения
Устройство для автоматического управления рабочим органом землеройно-транспортной машины по авт. св. 881225, отличающееся тем, что, с целью повышения надежности и эффективности управления в широком диапазоне изменения грунтовых условий, оно снабжено двумя компараторами и последовательно соединенными ло5 гическими элементами НЕ и И, причем к входу первого компаратора подключен измерительный блок действительной скорости машины, а к выходу - вход логического элемента НЕ и третий вход релейного элемента, к четвертому входу которого подключен через логический элемент И выход второго компаратора, вход которого соединен с выходом измерительного блока
силы тяги.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 881225, кл. Е 02 F 9/20, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2004 |
|
RU2291254C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ АВТОГРЕЙДЕРА | 2006 |
|
RU2327011C2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1979 |
|
SU881225A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ В ПРОЦЕССЕ КОПАНИЯ ГРУНТА | 2006 |
|
RU2327010C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
| Устройство для автоматического управления рабочим органом землеройнотранспортной машины | 1975 |
|
SU557156A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1978 |
|
SU735718A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1420126A1 |
