Изобретение относится к автоматике и может быть использовано при автоматизации погрузочно-разгрузочных и транспорт- ных работ на различных складах.
Целью изобретения является повьпиение надежности работы путем исключения возникновений аварийных ситуаций.
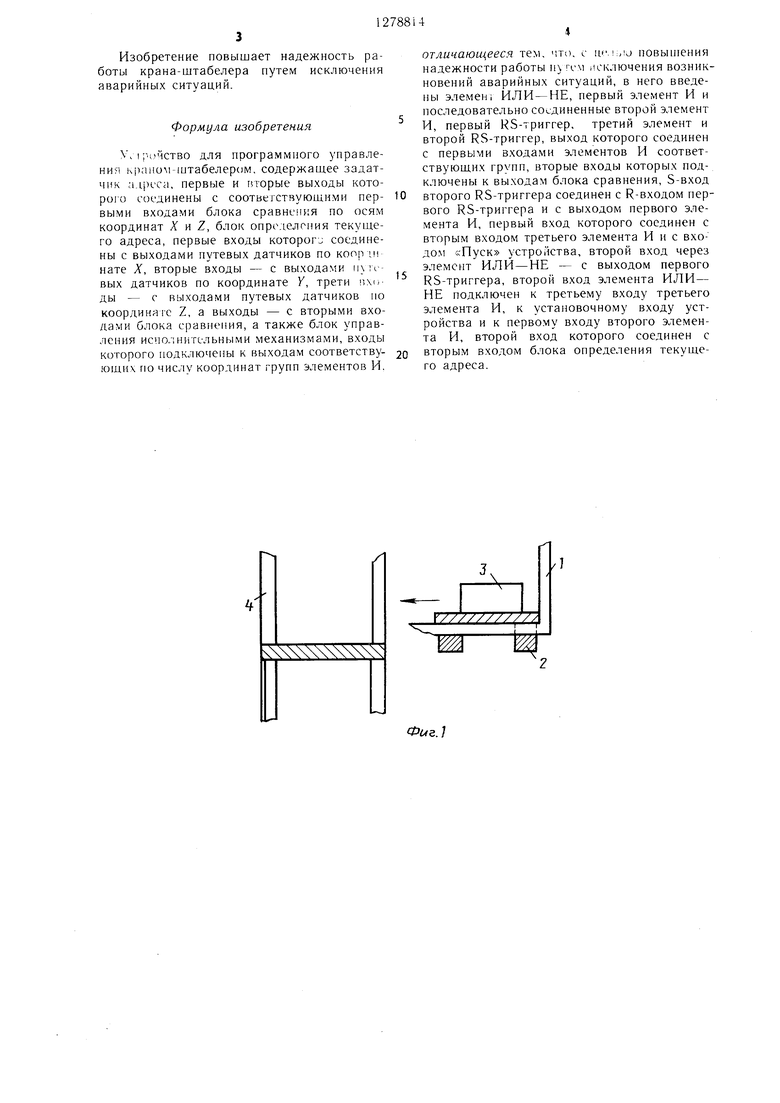
На фиг. 1 схематически изображено возникновение аварийной ситуации; на фиг. 2 - схема предлагаемого устройства.
На фиг. 1 стрелкой показано направле- ние движения грузозахватов 1 крар1а-ц табе- лера с поддоном 2, на котором установлена тара 3, к ячейке стеллажа 4.
Устройство для программного управления крапом-штабелером содержит задат- чик 5 адреса, выходы которого соединены с первыми входами блока G сравнегшя, блок 1 определения текущего адреса, выходы которого соединены с вторыми входами блока 6 сравнения, блок 8 определе- пия маршрута движения грузозахватов, вхо- ды которого соединены с выходами блока 6 сравнения, блок 9 управления исполнительными механизмами, входы которО1-о соединены с выходами блока определения маршрута движения грузозахватов, второй элемент И 10, первый вход которого сое- дипен с дополнительным выходом блока определения текущего адреса, RS-триггер 11 третий элемепт И 12, первый элемент И 13, элемент ИЛИ-НЕ 14, путевые датчики 15 ио координате , путевые датчики 16 по координате К, путевые датчики 17 по коордипате Z, регистр памяти 18. элемепт ИЛИ 19, элемент 20 задержки, элемент НЕ 21, четвертый элемент И 22, элемент ИЛИ 23, RS-триггер 24 и группа 25 элементов И.
Устройство работает с.аедующим об 1азом.
В исходном состоянии на выходе RS-Tpni-- гера 1 1 формируется нотепп.иал логического нуля, который блокирует элемент И 12.
При прохождении грузозахватов путевых датчиков на их выходах формируются кодовые комбинации, соответствующие номерл- датчика. Из фронта кодовой комбинации устройство, состоящее из элемента И.ЛИ 19, линии 20 задержки, элемента НЕ 21 и э.;1е- мента И 22, формирует положительный им- пульс, длительность которого равна време- пи задержки линией 20. Этот импульс проходит через элемент 23 и поступает на вход элемента И 10. Таким образом, при прохождении грузозахватов каждого даг- чика по каждой из координат /V, К или Z на выходе блока 7 огфеделения теку цего адреса формируется короткий г оложитель- ный импульс, поступающий на вход э.леме1-; та И 10. Кроме этого, раздельно по каждой координате импульсом, сформированпым на выходе элемента И 22, производится запись кода текущего адреса в регистр 18 памяти.
0
0 5
0 5
0
5
Коды, постунаюц,ие с выходов задат- чика 5 адреса и блока 7 определения текущего адреса, равны, и поэтому б. кж 6 сравнения не вырабатывае 1 никаких команд на перемещение грузозахватов. После задания адреса конечной точки марпфута движения и вида ыио/ няемой операции («Загрузка в стеллаж или «Выгрузка из стеллажа) на HIHHV «Пуск подается положительный импульс, который, пройдя через элемент И 13, поступает па вход RS-триг- гера 24, разрешая выдачу команд на движение грузозахватов в 6,:ioK 9 управ-лення исполнительными механизмами. Элемент И 13 разблокирован потенциалом логической единицы с выхода элемента ИЛИ-НЕ 4 из-за того, что на ого входе присутствует потенциал логического пуля с выхода RS- триггера 1 1. Е-1сли задана операция «Загрузка в стеллаж, то на 1пине «Выгрузка Г1рисут- ствует потенциал .логичеекого ну.чя, и состояние RS-триггера 11 не изменяется в течение всего времени выпо.чнепия заданий 1:е;1и задаь:а операция «Вьн рузка из стеллажа, то на «Зьп-рузка присутствует потенциал логической единииь:. который раз блокировывает элемепт И ИЛ и nMiiy. ibci i. ц фабатываемые блоком 7 определения теку- 1цего адреса при прохождении ny-cm.ix датчиков, ставят RS-Tpn 4 ep 1 1 в смипичпос- состояпие. Если щ задании г.()ще1Ч; адреса конечной точки маршрута Д г 1 же1;ия грузозахватов остается задапп)й операции «Вьп рузка, то па o6oi-:x вхол.ах -.i.icMem a ПЛИ -НЕ 14 npi j: TCTBV OT {К)те пиа;1ы лсл ической единицы и, следовательно, мент И 13 заб. 1ОК1 ровап потенппа. юм ло- ического нуля с выходи элемента ИЛИ - НЕ, 14, а элемент И 12 разблокирован гштен- циа:1ами логическо - едищщы с niiiniii «Выгрузка и с выхода RS-Tjinrrepa 11. ToiMa npii постуг1лепии VA ninny «Нуск положите.. i Hoi o импульса он проходит через эле- меь:т И 2 на первые входы элементов И блока 8 определения мари1рута движения грузозахватов, запрещая выдачу команд на движение грузозахватов в блок 9 управления исполнительпыглп мехапизмами 9 и, тем самым, исключается столкновение опор под- допа со стеллажом, т.е. аварийная еитуа- ция.
при залании с.ледующего адреса точки маршрута движения грузозахватов ви;1 заданной операпл1и изменить па «Загрузку в сте.члаж, то иа пшне «Выгрузка присутствует noTeiin.na.i .чогичсского нуля, который блокирует элемепт 12 для прохожде1 ня импульса с П1ины «Пуск и раз- блокировывает э.л. И 13, и импульс с 1ПИ1П 1 «ElycK, 1ройдя через э;|емент И 13, ставит RS-триггср 11 в нул.евое состояние и дает разрешение на элеме}1ты И в блоке 8 определения MapHJpv : a движения на выдачу ко манд .движения г)узозахватов блоку 9 управления , и1пте;1ЬН1 1ми механизмами.
Изобретение повышает надежность работы крана-штабелера путем исключения аварийных ситуаций.
Формула изобретения
|;ч Йство для программного управления краномштабелером, содержащее задат- чик адреса, первые и гяорые выходы которого соединены с соответствующими пер- выми входами блока сравне 1ия по осям координат Х и Z, блок определения текущего адреса, первые входы которого соединены с выходами путевых датчиков по копр щ нате X, вторые входы - с выходами м ч вых датчиков по координате Y, трети I-AD- ды - с выходами путевых датчиков по координягс Z, а выходы - с вторыми входами блока сравнения, а также блок управления исполнительными механизмами, входы которого подключены к выходам соответству- ющих по числу координат групп элементов И.
отличающееся тем, что, с lu ,li.io повьинения надежности работы и гем 1 сключения возникновений аварийных ситуаций, в него введены элемен ИЛИ-НЕ, первый элемент И и последовательно соединенные второй элемент И, первый RS-триггер. третий элемент и второй RS-триггер, выход которого соединен с первыми входами элементов И соответствующих групп, вторые входы которых подключены к выходам блока сравнения, S-вход второго RS-триггера соединен с R-входом первого RS-триггера и с выходом первого элемента И, первый вход которого соединен с вторым входом третьего элемента И и с входом «Пуск устройства, второй вход через элемент ИЛИ-НЕ - с выходом первого RS-триггера, второй вход элемента ИЛИ- НЕ подключен к третьему входу третьего элемента И, к установочному входу устройства и к первому входу второго элемента И, второй вход которого соединен с вторым входом блока определения текущего адреса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления краном-штабелером | 1984 |
|
SU1226412A1 |
| Устройство для управления краном-штабелером | 1988 |
|
SU1558822A1 |
| Устройство для программного управления краном-штабелером | 1982 |
|
SU1070509A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство для программного управления захватом автооператора | 1982 |
|
SU1233103A1 |
| Устройство для управления приводом кранштабелера | 1984 |
|
SU1193690A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| Система совместного управления штабелерами | 1990 |
|
SU1754595A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1247331A1 |
| Устройство для программного управления захватом автооператора | 1985 |
|
SU1506436A2 |

Изобретение относится к автоматике II может быть использовано при автомати- лации 11ог-р :«)чно-разгрузочных и транспортных на ра;(,-1ичнь.х складах. Целью и.и)б К тення ив.чяется повышение надежно- оги раГ)( исключения возникновения .-щарииной еитхации. Устройство для программного iipaii.1ения краном-штабелером содержит :1ал;пчик адреса, блок сравнения, блок (лцн лглепия текущего адреса, группы элсмс нюи И, блок управления исполнительными N:c ai4i3MaMH, элементы И, два RS-триг- гера и v.K .н чт ИЛИ -НЕ. 2 ил. 1чЭ 00 00
a
2525
У
У
1Ъ
Фиг. 2
| Устройство для программного управления краном-штабелером | 1982 |
|
SU1070509A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления краном-штабелером | 1984 |
|
SU1226412A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
