1
(21)43576А8/24-24
(22)04.01.88
(46) 15.10.89. Бюл. № 38
(71)Сибирский металлургический институт им. Серго Орджоникидзе
(72)Л.П. Мышляев, O.K. Садыкова и С.Ф. Киселев
(53)62-50(088.8)
(56)Турецкий X. Анализ и синтез систем управления с заплздь. занием. М. : Машиностроение, 1974, с. 214-217.
Авторское свидетельство СССР № J092534, кл. G Об G 7/66, 1980.
(54)УСТРОЙСТВО ДЛЯ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ
(57)Изобретение относится к средствам вычислительной техники и может быть использовано для моделирования и настройки регулирующих и управляющих систем, например, для формирования данных с заданными свойствами о внешних контролируемых возмущениях
объекта регулирования. Изобретение позволяет расширить область применения. Устройство содержит последовательно соединенные исполнительный блок 1, объек 2 регулирования, датчик 5, сумматор 6, первый блок 15 сравнения, регулирующий блок 14, первый экстраполятор 12, второй блок 10 сравнения, второй блок 7 запаздьша- (ия, блок 8 вычитания и второй интегратор 9, выход которого подсоединен к второму входу сумматора 6, выход которого является выходом систе- 1-1Ы, при этом выход блока 10 сравнения подключен к входу исполнительного блока 1, выход регулирующего блока 14 подключен к второму входу блока 8 вычитания, выход ограничителя 13, подключенного входом к выходу регулирующего блока 14, соединен с входом второго экстраполятора 11, выходом подключенного к второму входу блока 10 сравнения. 1 ил.
§
(О
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования для объектов с запаздыванием | 1985 |
|
SU1295365A1 |
| Система управления | 1985 |
|
SU1285430A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2011 |
|
RU2457528C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2128358C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| Система регулирования объектов высокого порядка с запаздыванием | 1989 |
|
SU1667002A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
| Система управления участками производства | 1986 |
|
SU1399699A1 |
Изобретение относится к средствам вычислительной техники и может быть использовано для моделирования и настройки регулирующих и управляющих систем, например, для формирования данных с заданными свойствами о внешних контролируемых возмущениях объекта регулирования. Изобретение позволяет расширить область применения. Устройство содержит последовательно соединенные исполнительный блок 1, объект 2 регулирования, датчик 5, сумматор 6, первый блок 15 сравнения, регулирующий блок 14, первый экстраполятор 12, второй блок 10 сравнения, второй блок 7 запаздывания, блок 8 вычитания и второй интегратор 9, выход которого подсоединен к второму входу сумматора 6, выход которого является выходом системы, при этом выход блока 10 сравнения подключен ко входу исполнительного блока 1, выход регулирующего блока 14 подключен ко второму входу блока 8 вычитания, выход ограничителя 13, подключенного входом к выходу регулирующего блока 14, соединен со входом второго экстраполятора 11, выходом подключенного ко второму входу блока 10 сравнения. 1 ил.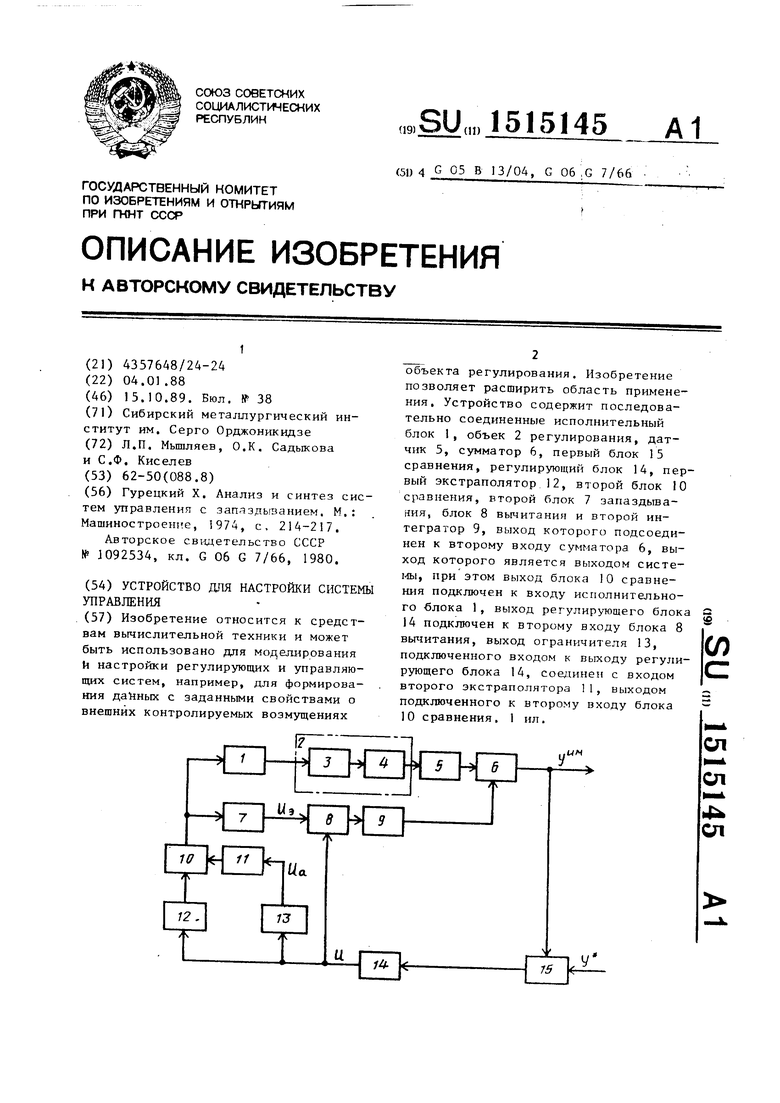
WW
ел ел
4
сл
315
Изобретение относится к средствам вычислительной техники и может быть использовано для моделирования регулирующих и управляющих систем, в частности для формирования данных с заданными свойствами о внешних контролируемых возмущениях объекта регулирования. При этом желаемые свойства этих возмущений можно формировать путем натурного воздействия и с помощью модели, адекватной в ограниченной области около натурно измеряемого сигнала.
Цель изобретения - расширение об- ласти применения устройства,
На чертеже приведена структурная схема устройства.
Устройство содержит последовательно соединенные исполнительный блок I, объект 2 регулирования, сос- тЬящий из первого блока 3 запаздывания и первого интегратора 4, датчик 5, сумматор 6, выход которого является выходом ycTpoiicTBa, второй блок 7 запаздывания, блок 8 вычитания, второй интегратор 9, второй блок 10 сравнения, второй экстраполятор 11, первый экстраполятор 12, ограничитель 13, регулирующий блок Д и нер- вый блок 15 сравнения, соответствующие входы которого соединены с BXO;V--M и выходом устройства.
На чертеже обозначено: у
Ил
иыходиой сигнал системы; U - ре:пулир 1ощее воздействие; у - сигнал о заданном значении выходной величины объекта регулирования,
Устройство работает следующим образом,
При функ1Ц{онироваш1и устройства формировать данные с желаемыми свойствами наиболее целесообразно с использованием только модели объекта, представленной интегратором 9, для .того чтобы не нарушать режима функционирования натурного объекта 2. Однако модель объекта адекватна в ограниченной области. Поэтому, если сигнал регулируемого воздействия превьш1ает указанную область, часть сигнала направляется для реализации на натурный объект 2 регулирования. Если же такого превышения нет, го весь сигнал направляется на модель объек- та. Поскольку объект 2 регулирования содержит запаздывание, то сигнал регулирующего воздействия экстраполируется, а ошибка экстраполяции учиА54
тывается также с помощью модели объекта.
Для реализации описанной процедуры на вход первого блока 15 сравнени подается сиг:1ал о желаемых значениях данных, из которого вычитается выходной сигнал сумматора 6 о сформированных данных.Сигнал полученной разности преобразуется в регулирующем блоке 14, например, с пропорционально- интегральным -законом регулирования, в сигнал регулирующего воздействия, который поступает на вход ограничителя 13 с законом функционирования
ru(t) при |U(t)l 4b ,.. I +b при U(t)b (1) -b при ( где U(t) - выходной-сигнал ограничителя 13;
U(t) - выходной сигнал регулирующего 6jio;;a 14; b - настроечный параметр,
выбнраемьш исходя из .зог
ны адекватности модели
объекту.
Сигнал регулирующего воздействия также поступает,,на вход первого экс раполятора 12, HaniniMep, с передаTO flKjfi фуИКЦИС
-... 2
где - время чистого запаздьшання
объекта регулирования 2; I - - постоянная времени первого экстраполятора 12, и экстраполируется на интервал времени запаздывания t в объекте регулирования.
Постоянная времени -Tj, берется равной примерной I/3 Г . Выходной сигнал ограничителя 3 также экстраполируется на время L во втором экстраполя- торе 11, который состоит из реального форсирующего звена с передаточной функцией типа (2) и ограничителя с законом фуш сционирования, аналогичным (1), Выходной сигнал второго экстраполятора 11 вычитается из выходного сигнала первого экстраполятора 12 во втором блоке 10 сравнения и реализуется исполнительным блоком 1 на объекте регулирования 2, Для исключения ощибки экстраполяции выходной сигнал блока 10 сравнения задерживается на время во втором блоке 7 запаздывания и направляется в блок 8 вычитания. Сюда же подается сиг51
нал с выхода регулнр тощего блока 14. На выходе блока 8 вычитании получается
Ug(t)U(t)-U,(t-,(3)
где Ug(t) - выходной сигнал блока 8
вычитания;
Ug (t-i) - выходной сигнал второго блока 7 запаздывания.
Сигнал Ug(t) включает сигнал об ошибке экстраполяции экстраполятора 12 и находится в том диапазоне, в котором работоспособна модель объекта. Сигнал и g,(t) преобразуется интегра- тором 9 в корректировку выхода объекта и алгебраически суммируется с выходным сигналом датчика 5. В результате получается сигнал о желаемом натурномодельном выходе, вклю- чающем натурные изменения сигнала и расчетные корректировки. Тем самым достигается поставленная цель - расширение области применения устройства.
Формула изобретения
Устройство для настройки системы управления, содержащее регулирующий блок, сумматор, последовательно соединенные исполнительный блок и объект
А56
регулирования, cocTtiHiiuul иу первого блока запаздывания и первого интегратора, соедннепног о выходом с входом датчика, последовательно включенные второй блок запаздывания, бло вычитания и второй интегратор, выход первого блока запаздывания соединен с входом первого интегратора, о т л и ч а ь- щ е е с я тем, что, с целью расширения области применени устройства, в него введены первый экстраполятор, первый блок сравнения последовательно включенные ограничи- телв, второй экстраполятор и второй блок сравнения, выход которого подключен к входам исполнительного блока и второго блока запаздьшания, выход первого блока сравнения соединен с входом регулирующего блока, выход которого соединен с вторым входом блока вычитания и входами ог 1аничите ля и экстраполятора, выход которого связан с вторым входом второго блока сравнения, выход датчика подключен к первому входу сумматора, выход второго интегратора соединен с вторым входом сумматора, первой вход первого блока сравнения является входом устройства, выход сумматора подключен к второму входу первого блока сравнени и является выходом устройства.
