Изобретение относится к робототехнике и может быть испольаонапо для силового очувствления манипуляторов промьпштенных роботов.
Целью изобретения является повышение грузоподъемности базового зпе- на за счет увеличения его жесткости при однг)времен11ом повьш1ении точности очувствления путем уменьшения напряженно-деформированного состояния упругих гэлементов.
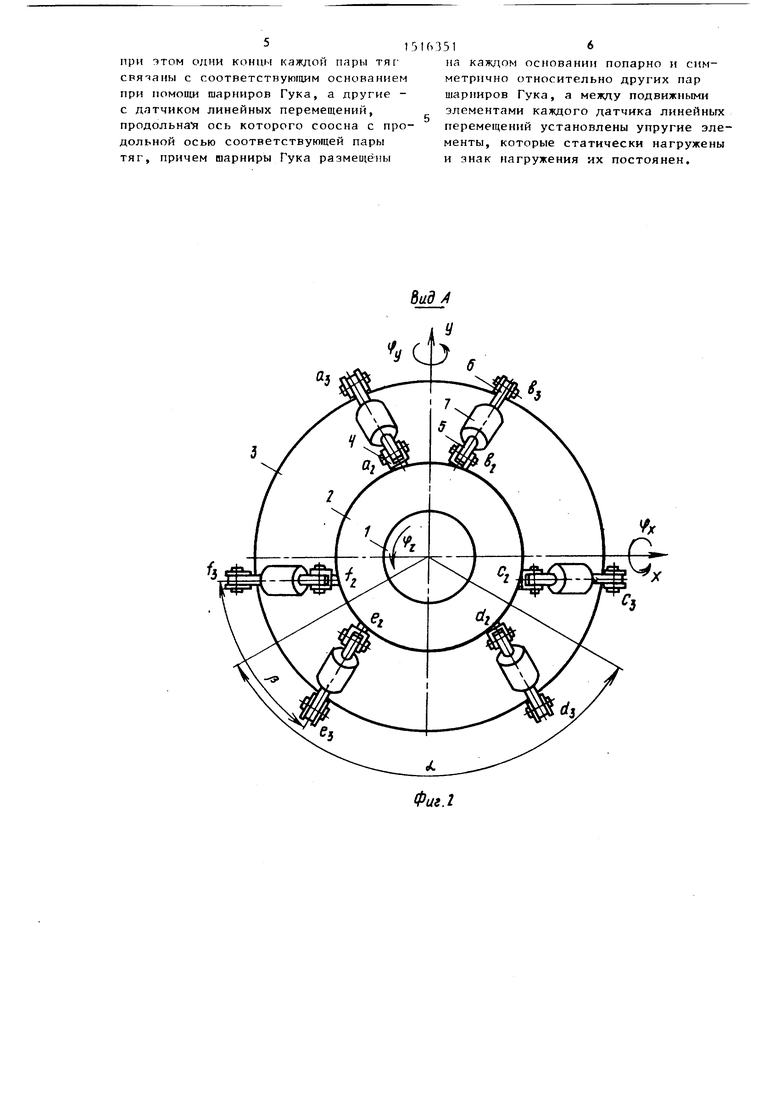
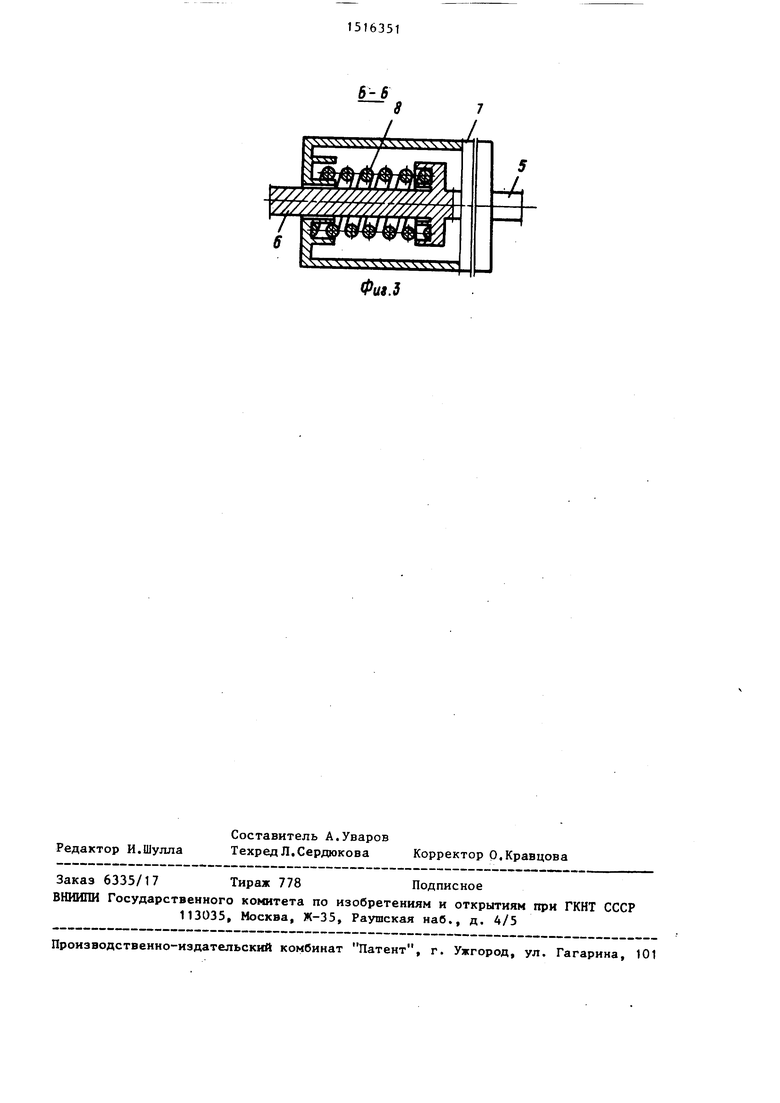
На фиг.1 показано устройство, об- П1ИЙ вид{ на фиг.2 - вид А на фиг.1 на фиг.З - сечение Б-Б на фиг.1.
На базовом звене 1, например, манипулятора с осевым смещением L закреплены основания 2 и 3, на которых с круговой симметрией oi. попарно (аиЬ, сие, еи) размещены шарниры Гука 4. Тяги 5 и 6 сопряжены с датчиками 7 линейных перемещений и с одноименными (например, а и а , f и f3) шарнирами Гука А на основаниях 2 и 3 так, что оси датчика 7 и тяг 5 и 6 лежат на одной прямой. Статически напряженная пружина 8 одним концом сопряжена со стаканом на корпусе датчика 7, связанного с тягой 5, а другим - со стаканом, жестко связанным с тягой 6, которая скреплена с подвижным элементом датчика 7 перемещений.
Устр(-1Йство работает следующим образом.
Под действием силового фактора деформируется звено 1 манипулятора, что обус.повливает перемещение одного основания относительно другого ввиду их жесткстй связи с звеном манипулятора на разных участках. Относительное перемещение оснований 2 и 3 характеризуется совокупностью относительных линейных перемещений тяг 5 и 6 вдол1 оОцей оси, которые фиксируются датчиком 7. Таким образом, звено 1 манипулятора играет роль упругого элемента в измерительном устройстве, а датчики 7 линейных перемещений - роль резисторов, сопрягаемых с упругим элементом через передаточные jjiKf-ieHTbi 2-6 устройства.
Двухосность шарниров 4 обеспечивает Г1остоя)1ную самоустановку элементов 5 - 7 на одной прямой, что обус- ловлиняет возможность поступательного перемещении подвижных частей датчиков и,Ц1Ъ 1ь тгой прямой при любом характере .1ткчс11тельных перемещений ос0
5
0
5
0
5
0
5
0
5
HOBaHnit 2 и 3. Неизбежные зазоры в сопряжениях выбираются с помощью пружин 8 и ввиду неизменности знака нагруженности пружин при работе устройства не оказывают негативного влияния на точность измерения,
Так как прямые, по которым самоустанавливаются элементы 5-7 являются прямолинейными образующими однополосного гиперболоида вращения, то при круговой симметрии расположения пар двухосных шарниров каждый вид относительного перемещения оснований 2 и 3 характеризуется неповторяющимся знаковым сочетанием относительных перемещений тяг 5 и 6, фиксируемых датчиками 7. Конструкция устройства позволяет варьировать в широких пределах параметрами L, R, R, jb и за счет этого обеспечивать требуемые передаточные функции для основных видов перемещений,
В предлагаемом устройстве ввиду практически разгруженности всех комплектующих деталей nocлeд iиe могут быть выполнены достаточно легкими, что обусловит малое приращение массы звена. Монтаж предлагаемого устройства на звене манипулятора не вызывает снижение жесткости последнего, а следовательно, не ухудшает динамические характеристики манипулятора. Для монтажа устройства не требуется демонтаж манипулятора, что обусловливает высокую технологичность конструкции
Формула изобретения
Устройство для силового очувствления преимущественно манипулятора, содержащее базовое звено с установленными на нем основаниями, шарниры Гука, датчики линейных перемещений, тлги и упругие элементы, отличающееся тем, что, с целью повышения грузоподъемности базового звена за счет увеличения его жесткости при одновременном повышении точности очувствления путем уменьшения напряженно-деформированного состояния упругих элементов, основания жестко установлены на базовом звене симметрично относительно его продольной оси и кинематически связаны друг с другом при помощи тяг, собранных в пары, продольные оси которых в паре соосны и образуют все вместе однополостной гиперболоид вращения.
515
при этом одни концы каждой пары тяг свяяаны с соответствующим основанием при помощи шарниров Гука, а другие - с дятчиком линейных перемещений, продольна я ось которого соосна с продольной осью соответствующей пары тяг, причем шарниры Гука размещё)1Ы
63516
на каждом основании попарно и симметрично относительно других пар шарниров Гука, а между подвижными элементами каждого датчика линейных перемещений установлены упругие элементы, которые статически нагружены и знак нагружения их постоянен.
| название | год | авторы | номер документа |
|---|---|---|---|
| Податливый дифференциальный шарнир манипулятора с силомоментным очувствлением | 2021 |
|
RU2803718C2 |
| Устройство очувствления | 1986 |
|
SU1421535A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ МАНИПУЛЯТОР | 1999 |
|
RU2166846C2 |
| Робот-манипулятор | 2024 |
|
RU2833264C1 |
| Исполнительное устройство промышленного робота | 1985 |
|
SU1301701A1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| Шестикоординатный датчик нагрузки | 1982 |
|
SU1016713A1 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
| ОПОРА СЕЙСМОСТОЙКОГО СООРУЖЕНИЯ | 2010 |
|
RU2427693C1 |
Изобретение относится к робототехнике и может быть использовано для силового очувствления манипуляторов промышленных роботов. Целью изобретения является повышение грузоподъемности базового звена за счет увеличения его жесткости при одновременном повышении точности очувствления путем уменьшения напряженно-деформированного состояния упругих элементов. При нагружении базового звена 1 происходит относительное перемещение основания 2 относительно основания 3 за счет упругости самого звена 1. При этом возникает относительное движение тяг 5 и 6, которое и фиксируется соответствующим датчиком 7 линейных перемещений. 3 ил.
3
f.
| Силомоментный датчик | 1983 |
|
SU1155878A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
