18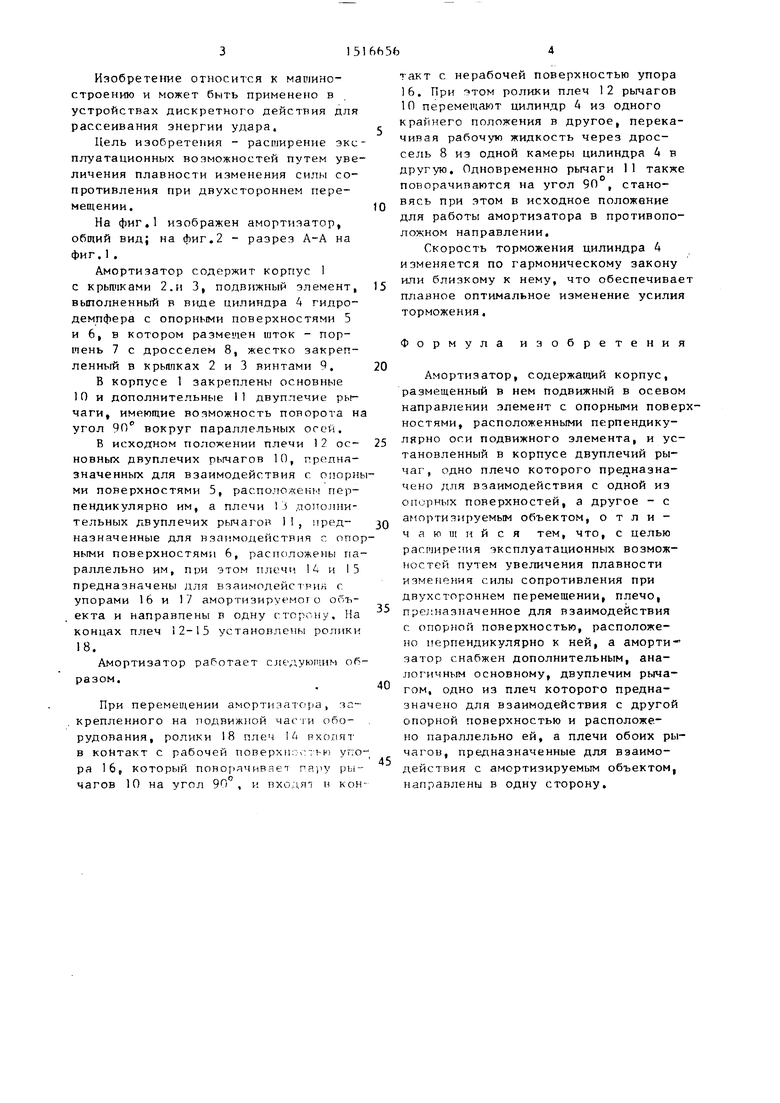
| название | год | авторы | номер документа |
|---|---|---|---|
| Амортизатор | 1978 |
|
SU777278A1 |
| ДВУСТОРОННИЙ АМОРТИЗАТОР | 1999 |
|
RU2178846C2 |
| Промышленный робот | 1988 |
|
SU1576305A1 |
| Ходовая часть гусеничного транспортного средства | 1991 |
|
SU1808755A2 |
| Поворотное делительное устройство | 1987 |
|
SU1511065A1 |
| ПНЕВМОГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 1994 |
|
RU2079747C1 |
| Устройство для тренировки мышц | 1990 |
|
SU1789242A1 |
| Станок для двухсторонней гибки труб | 1986 |
|
SU1449176A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВКЛЮЧЕНИЯ УСТАНОВКИ ТУШЕНИЯ ПОЖАРОВ | 1997 |
|
RU2116094C1 |
| Амортизатор | 1989 |
|
SU1746096A1 |
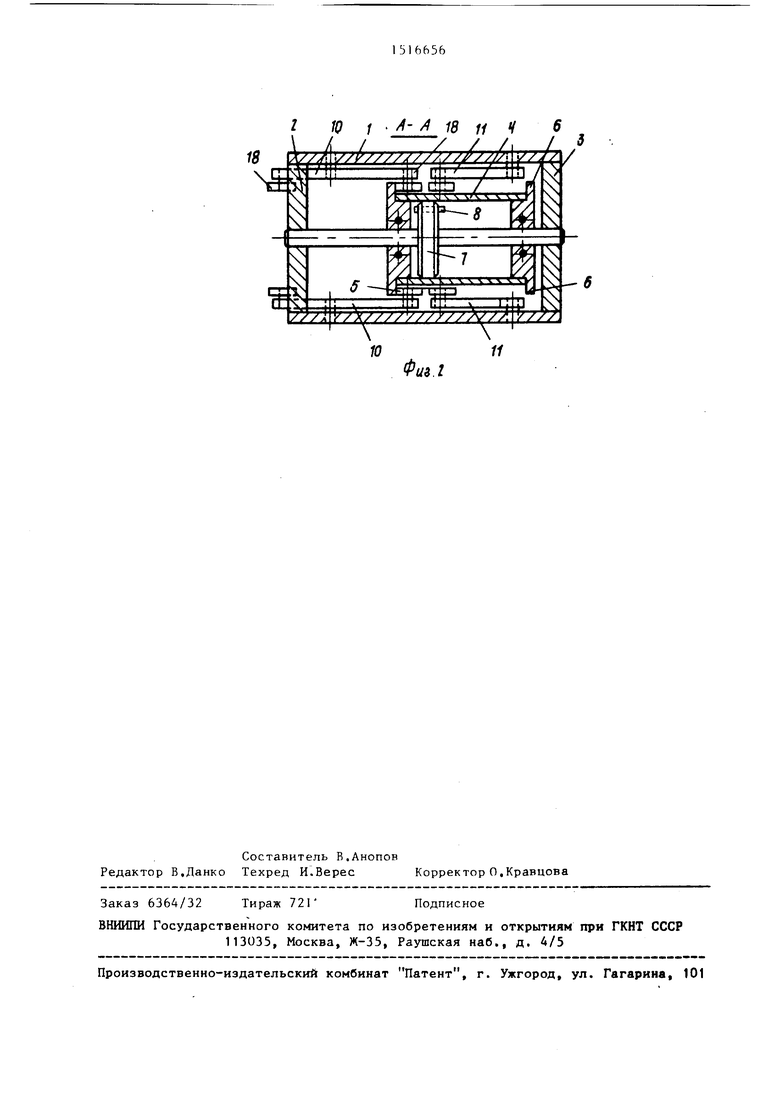
Изобретение относится к машиностроению и может быть применено в устройствах дискретного действия для рассеивания энергии удара. Цель изобретения - расширение эксплуатационных возможностей путем увеличения плавности изменения силы сопротивления при двухстороннем перемещении. При взаимодействии упора 16 с плечами 14 двухплечих рычагов плечи 12, установленные перпендикулярно опорным поверхностям 5 цилиндра 4, перемещают его относительно штока-поршня, закрепленного в крышках 2 и 3 корпуса 1, при этом опорные поверхности 6 взаимодействуют с установленными параллельно им плечами 13 рычагов, поворачивая их в исходное положение для работы амортизатора в противоположном направлении. 2 ил.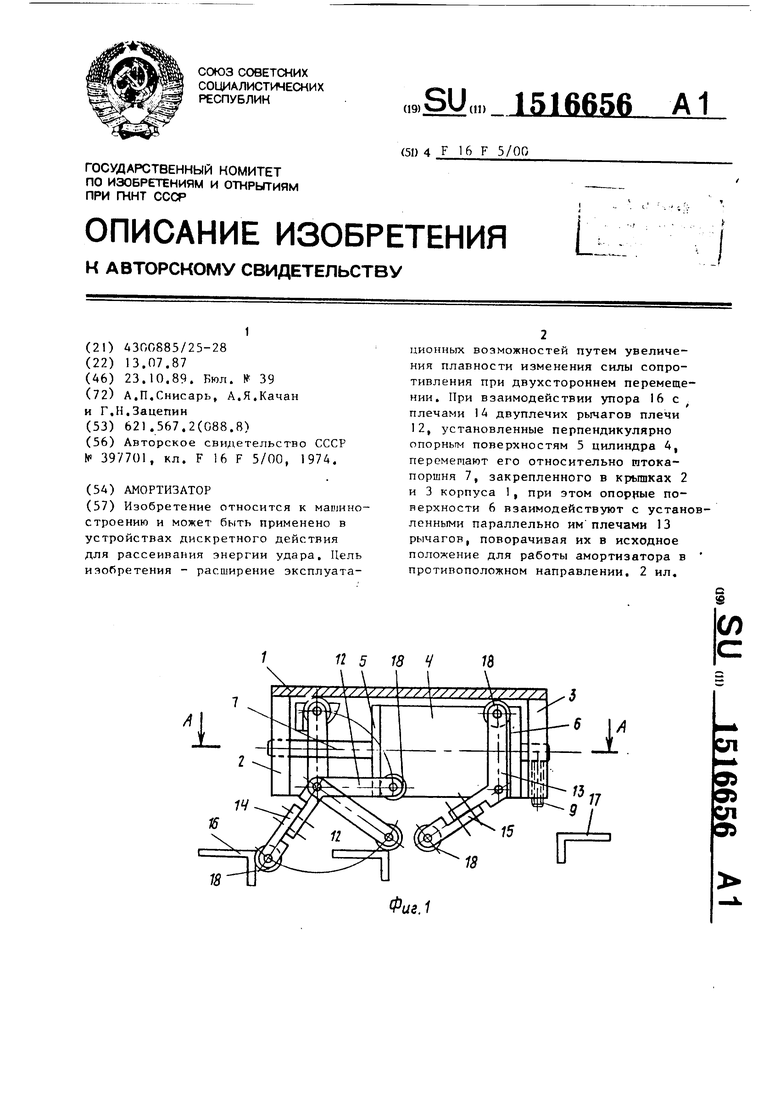
Фиг.1
Изобретение относится к машиностроению и может быть применено в устройствах дискретного действия для рассеивания энергии удара.
Цель изобретения - расширение эксплуатационных возможностей путем увеличения плавности изменения силы сопротивления при двухстороннем перемещении.
На фиг 41 изображен амортизатор, общий вид; на фиг.2 - разрез А-А на фиг,1.
Амортизатор содержит корпус 1 с крышками 2.и 3, подвижный элемент, выполненный в Btffle цилиндра 4 гидродемпфера с опорными поверхностями 5 и 6, в котором размешен шток - поршень 7 с дросселем 8, жестко закрепленный в крышках 2 и 3 винтами 9.
В корпусе 1 закреплены основные 10 и дополнительные 11 двуплечие рычаги, имеющие возможность поворота н угол 90° вокруг параллельных осей,
В исходном положении плечи 12 ос- новных двуплечих рычагов 10, гредня- значенньгх для взаимодействия с опорнми поверхностями 5, расположены перпендикулярно им, а плечи IJ .aonojniH- тельных двуплечих рычагов 11, пред- назначенные для взаимодействия с опоными поверхностями 6, расположены параллельно им, при этом плечи и 1 5 предназначены для взаимодейст Рия г. упорами 16 и 17 амортизируемого объекта и направлены в одну сторону. На концах плеч 12-15 установлены ролики 18.
Амортизатор работает ,уюп1им образом.
При перемещении амортизатора, закрепленного на подвижной час ч и оборудования, ролики 18 плеч 16 входят в контакт с рабочей поверхиосл ью упо- ра 16, который поворячивает riajiy рычагов 10 на угол 90 , и входят н кон
О
5
0
5
такт с нерабочей поверхностью упора 16. При этом ролики плеч 12 рычагов 10 перемещакот цилиндр А из одного крайнего положения в другое, перекачивая рабочую жидкость через дроссель 8 из одной камеры цилиндра 4 в другую. Одновременно рычаги 11 также поворачиваются на угол 90 , становясь при этом в исходное положение для работы амортизатора в противоположном направлении.
Скорость торможения цилиндра 4 изменяется по гармоническому закону или близкому к нему, что обеспечивает плавное оптимальное изменение усилия торможения.
Формула изобретения
Амортизатор, содержащий корпус, размещенный в нем подвижный в осевом направлении элемент с опорными поверхностями, расположенными перпендикулярно оси подвижного элемента, и установленный в корпусе двуплечий рычаг, одно плечо которого предназначено для взаимодействия с одной из опорных поверхностей, а другое - с амортизируемым объектом, о т л и - ч а ю U1 и и с я тем, что, с целью расгииреиия эксплуатационных возможностей путем увеличения плавности изменения силы сопротивления при двухстороннем перемещении, плечо, прелназначенное для взаимодействия с опорной поверхностью, расположено перпендикулярно к ней, а амортизатор снабжен дополнительным, аналогичным основному, двуплечим рычагом, одно из плеч которого предназначено для взаимодействия с другой опорной поверхностью и расположено параллельно ей, а плечи обоих рычагов, предназначенные для взаимодействия с амортизируемым объектом, направлены в одну сторону.
Фи9.1
11
| ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР | 0 |
|
SU397701A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
