Изобретение относится к машиностроению и может быть использовано в конструкциях промышленных роботов.
Целью изобретения является расширение функциональных возможностей путем увеличения числа фиксированных точек позиционирования.
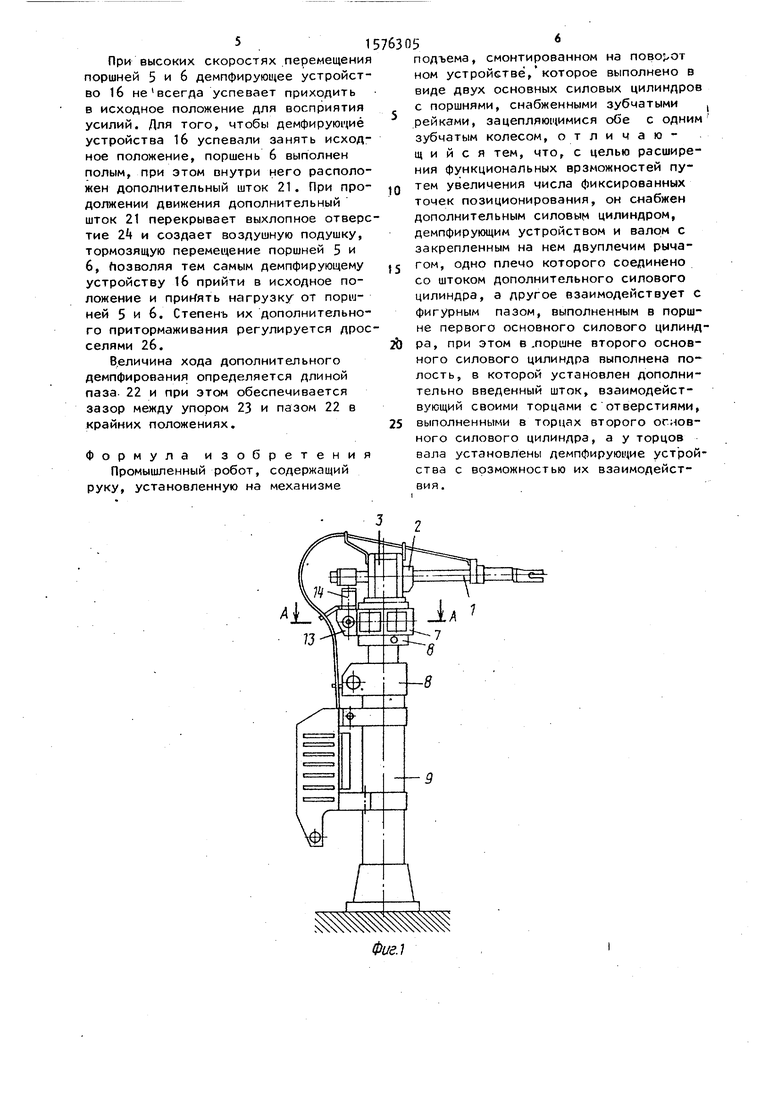
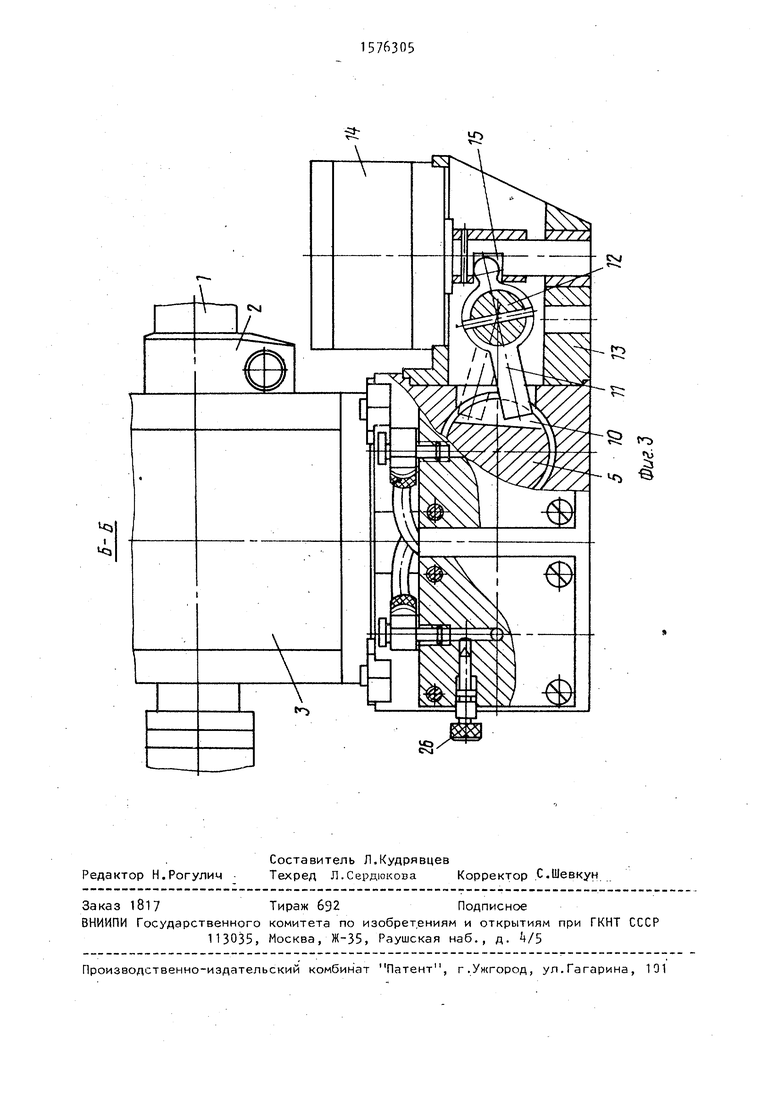
На фиг. 1 показан промышленный робот, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Промышленный робот содержит механическую руку 1, установленную на подвижной каретке 2 механизма 31
подъема, жестко связанного с фланцем зубчатого колеса 4 (фиг. 2). Последнее входит в зацепление с двумя поршнями 5 и 6, перемещающимися в корпусе поворотного устройства 7 смонтированного на механизме 8 установочных перемещений, позволяющего корректировать исходное положение по трем прямоугольным координатам. Механизм 8 смонтирован на основании 9.
Поршень 5 (фиг. 2) выполнен с фигурным пазом 10, поверхности которого В, Г, Д и Е взаимодействуют с двуплечим ручагом 11, закрепленным на валу 12 (фиго 2 и 3) с возможностью перемещения параллельно оси поршня 5 в корпусе 13, который закреплен на корпусе поворотного устройства 7.
Двуплечий рычаг 11 поворачивается в корпусе 13 дополнительным силовым
При повороте руки 1 на максимал ный угол 0 - 180Р поршни 5 и 6 пер мещаются из одного крайнего положе в другое. Позиционирование руки 1 регулируется упорами 20, установле ными в крышках 19. Двуплечий рычаг 11, повернутый силовым цилиндром 1 взаимодействует с поверхностями В или Е фигурного паза 10 поршня 5, передавая силовое воздействие чере вал 12 на демпфирующие устройства 16, при этом между упором 17 и кор сом демпфирующего устройства 16 им ется зазор.
Дополнительный шток 21 поршня 6 оказывает дополнительное демпфирую воздействие воздушной подушкой, об разуемой при перекрывании отверсти 2k в крышках 25, заставляя сжатый воздух перетекать через дроссель 2
При повороте руки 1 на угол, ме ший или равный 90°, двуплечий рыча 11, повернутый дополнительным сило вым цилиндром 1й в другое крайнее положение, взаимодействует с повер ностями В-Г (при движении в сектор О - 90°) или Д-Е (при движении в секторе 90 - 180°) фигурного паза 10 поршня 5. При взаимодействии дв
20
25
30
цилиндром 1 (фиг. 3), воздействующим 35 плечего рычага 11 с поверхностями
на противоположный конец двуплечего рычага 11 выступами паза 15, допускающего осевое перемещение двуплечего рычага 11. В корпусе 13 соосно валу 12 двуплечего рычага 11 установлены демпфирующие устройства 16 (фиг. 2), служащие подвижными упорами, обеспечивающими точную фиксацию до жесткого упора 17 в конце хода.
Положение демпфирующего устройства 16 фиксируется контргайкой 18. В, крышках 19 поворотного устройства 7 установлены подвижные упоры 20, взаимодействующие с поршнем 5.
Поршень 6 выполнен полым и внутри него расположен дополнительный шток 21 с продольным пазом 22, ограничивающим ход штока 21 упором 23.
Выхлопные отверстия 2Д в крышках 25 перекрыты дополнительным штоком 21, заставляющим воздух выходить через дроссель 26.
Робот работает следующим образом.
10
Н
76305 4
Вертикальное перемещение механической руки 1 осуществляется механизмом 3 подъема. Ее поворот произво- дится при повороте вала-шестерни от поршней 5 и 6 при подаче давления.
При повороте руки 1 на максимальный угол 0 - 180Р поршни 5 и 6 перемещаются из одного крайнего положения в другое. Позиционирование руки 1 регулируется упорами 20, установленными в крышках 19. Двуплечий рычаг 11, повернутый силовым цилиндром , взаимодействует с поверхностями В или Е фигурного паза 10 поршня 5, передавая силовое воздействие через вал 12 на демпфирующие устройства 16, при этом между упором 17 и корпусом демпфирующего устройства 16 имеется зазор.
Дополнительный шток 21 поршня 6 оказывает дополнительное демпфирующее воздействие воздушной подушкой, образуемой при перекрывании отверстий 2k в крышках 25, заставляя сжатый воздух перетекать через дроссель 26.
При повороте руки 1 на угол, меньший или равный 90°, двуплечий рычаг 11, повернутый дополнительным силовым цилиндром 1й в другое крайнее положение, взаимодействует с поверхностями В-Г (при движении в секторе О - 90°) или Д-Е (при движении в секторе 90 - 180°) фигурного паза 10 поршня 5. При взаимодействии дву20
25
30
35 плечего рычага 11 с поверхностями
0
5
0
5
Г или Д, определяющими положение р,у ки в пределах, меньших или равных 90°. рука 1 промышленного робота занимает положение, определяемое упором 17 демпфирующего устройства 16, зафиксированного гайкой 18, а для крайних положений (0 - 180°) позицио- яирование руки 1 определяется упорами 20.
При положении руки 1 промышленного робота на угле 90° двуплечий рычаг 11 нагружен силой, действующей со стороны поверхностей Б или В паза 10 поршня 5.
Если силовой цилиндр Ц повернет двуплечий рычаг 11, то поршэнь 5 продолжит свое движение к упору 20,а демпфирующее устройство 16 переместит двуплечий рычаг 11 в противоположную сторону.
При соприкосновении поверхностей В или Е с двуплечим рычагом 11 демпфирующее устройство 16 воспримет нагрузку и затормозит поршень 5.
i
i
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1981 |
|
SU1042992A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Захватное устройство | 1985 |
|
SU1291393A1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Манипулятор для раздельного съема отливок и литниковой системы | 1980 |
|
SU865515A1 |
Изобретение относится к области машиностроения и может быть использовано в конструкциях промышленных роботов. Целью изобретения является расширение функциональных возможностей путем увеличения числа фиксированных точек позиционирования. Вертикальное перемещение руки производится механизмом подъема, а поворот с помощью зубчатого колеса 4 и поршней 5 и 6. При повороте руки на максимальный угол поршни 5 и 6 перемещаются из одного крайнего положения в другое. Двуплечий рычаг 11 поворачивается с помощью дополнительного силового цилиндра и взаимодействует одним плечом с фигурным пазом 10, выполненым в поршне 5. Число ступенчатых поверхностей паза 10 определяет число дополнительных фиксированных точек позиционирования. 3 ил.
| Промышленный робот | 1974 |
|
SU503712A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
