Изобретение относится к электргг- технике, а именно к технологическому оборудованию ускорителей заряженных частиц и термоядерных установок, в частности к источникам питания электромагнитного оборудования постоянного тока.
Целью изобретения является повышение быстродействия при отработке Оеэ перерегулирования в выходном токе ступенчатого задающего сигнала большой величины.
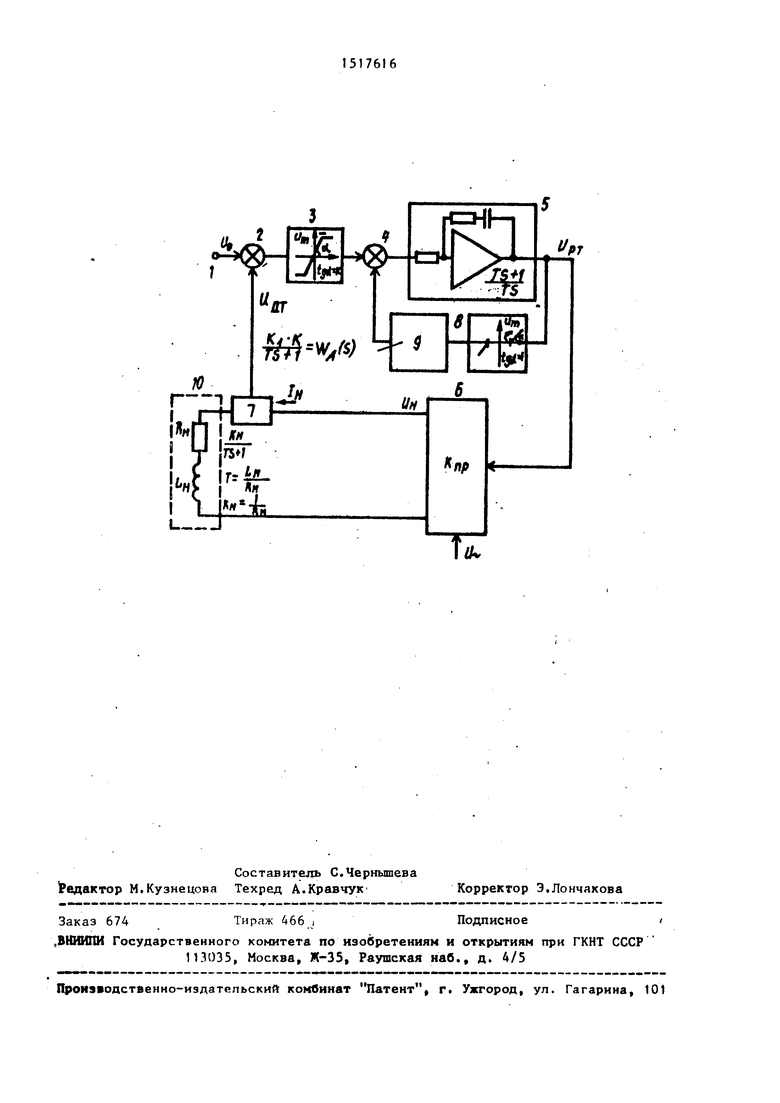
На чертеже приведена функциональная схема устройства.
к вьшоду 1 подключения задающего . сигнала UQ подключен второй вход первого узла сравнения 2, выход которого через блок нелинейности 3 с характеристикой типа насыщения соединен с первьм входом второго устройства сравнения 4, выход которого через пропорционально-интегральный регулятор 5 подключен к управляющему входу преобразователя 6 переменного напряжения и в постоянное U. Выход датчика 7 тока соединен с первьм входом первого узла сравнения 2. К вЪгходу пропорционально-интегрального регуля:л
-J
а
(
тор 5 подкличен блок нелинейности 8 . с характеристикой типа зоны нечувствительности, выход которого через апериодическое звено 9 связан с вторьм входом второго узла сравнения it. Вы- оД преобразователя 6 через датчик 7 тока соединен с обмоткой электромагнита 10.
На чертеже и далее в описании Няты следующие обозначения:
t) «e-Ht) Sr(t)
15
20
r(t) U,,i,(t)
tJ(t)
KM.
задающий ступенчатый сигнал амплитуды UB
сигнал на выходе пропорционально- интегрального регулятора (управляющий сигнал для преобразователя); сигнал на выходе датчика тока; напряжение и ток на выходе преобра- 25 зователя; сигнал на выходе апериодического . звена;
30
- Уц(5) - передаточная функ- ция нагрузки, где
Т L,/R,KH-l/Rt,, где Ьц,КцГ индукт i тивность и актив-
.JciS) iufS)
ное сопротивление нагрузки (электромагнита) ;
. . p(.b;
B U e np
у ,;).
Otc
передаточная функция датчика регулируемого тока;
передаточная функ- ция пропорционально-интегральногорегулятора тока; передаточная функция преобрааовате- О ля;
передаточная функция усилительного апериодического « звена;
порог зоны нечувствительности бло
ка нелинейности 8 с характеристикой типа зоны нечувствительности и уровень ограничения блока нелинейности 3 с характеристикой типа насьпцення, соответствующий максимальному напряжению UH на , выходе преобразова-f теля 6.
Устройство работает следующим образом.
Если принять, не нарушая общности, что Кпр К„« Ко It то коэффициент К связан с круговой частотой CJ ср,г среза линейной части разомкнутого контура стабилизации тока соотнощением К Т W
ср,т
где Т постоянная времени нагрузки.
Значение К много больше 1, т,е, частота среза сОср.и линейной части разомкнутого контура, охватьшающего регулятор тока 5, много больше .
В качестве выходного сигнала принят сигнал с выхода датчика тока U(t), который повторяет форму вы- ходного тока 1„(Ь), так как U(t) « K,-i«(t).
Если уровень задающего сигнала
мал - и.
. .НА к
где U(v, - уровень
ограничения блока нелинейности 3, К - коэффициент усиления (пропорциональности) на линейном участке блока нелинейности 3, то изменение всех сигналов соответствует линейному режиму и наличие блоков нелинейности 3 и 8 никак не проявляется. Передаточная функция замкнутого контура стабилизации тока будет иметь вид:
ф(8) - -WiSl идз) i+w(s)
т
-i- sгде W(S) К
К„
Кн
TS+l
- g--Nnp- Ts+j
передаточная функция разомкнутого контура стабилизация тока и принято.
не нарушая общности. К,
К,
пp и .
Тогда процесс изменения напряже щя
5,3
на выходе датчшса тока 7 при малом ступенчатом сигнале U носит
монотонный характер и описьтается выражением U(t) Ug(l-e r-). Изменение также носит монотонный характер. Видно, что при малых сигналах процессы в известном и предлагаемом устройствах совпадают.
При больших уровнях Up --- посл
К
приложения задающего воздействия выходной сигнал блока нелинейности 3 с характеристикой типа насыщения устанавливается на ограничение и равен и. Сигнал, иpr(t) на выходе регулято рд 5 тока превьшает значение U зоны нечувствительности блока 8 нелинейности с характеристикой типа зоны нечувствительности и появляются сигнал на выходе блока 8 и сигнал iJA(t) на выходе апериодического звена 9. I Вследствие этого за очень малое время (так как частота среза 03 с контура, охватьгоающего регулятор 5 тока, большая - много больше частоты среза cOcpj. контура стабилизации выходного тока) сигнал UpT(t) на выходе регулятора 5 тока установится равным U) с высокой точностью, а к нагрузке будет приложено максимальное напряжение.
Сигнал Up(t) на выходе регулятора 5 тока будет поддерживаться рав- ньм и до тех пор, пока ошибка регулирования (и,- (t)) K , т.е. пока выход блока 3 нелинейности удерживается на огранич еник. В течение этого времени (пока Ug- tIдt)K U к нагрузке будет приложено максимальное напряжение U «щ изменение заряда на емкости в интегрирующей ч части регулятора 5 тока будет происходить с высокой точностью адекватно изменению тока нагрузки. После того, |как ошибка регулирования уменьшится до значения (Uo- U),, сигнал (t) на выходе регулятора 5 тока .уменьшится ниже уровня U, сигнал на выходе блока 8 нелинейности стагг нет равным нулю, а на выходе апери17М6
одического звена 9 сигнал Uд(t) будет спадать по экспоненте с уровня, v при котором Uot-Ct) стал меньше U..
Г W
Таким образом, в течение Времени, пока напряжение ид(Ь) на выходе датчиг ка тока (а значит и ток нагрузки) не достигло уровня
и,
К- Uo - U/V.
К
к нагрузке приложено максимальное напряжение и„ макс значит и скорость выхода максимальна.
Ф O -р мула изобретения
Источник питания электромагнита постоянного тока, содержащий преобразователь переменного напряжения в постоянное, вход которого соединен с входными вьшодами, а выход через датчик тока подключен к вьтодам для подсоединения электромагнита, выход датчика тока связан с первым входом первого узла сравнения, второй вход которого соединен с вьюодом для подключения источника задающего сигнала, пропорционально-интегральный регулятор, выход которого соединен с управляющим входом преобразователя переменного, напряжения в постоянное, а также с входом блока нелинейности с характеристикой типа зоны нечувст вительности, выход которого подключен к входу апериодического звена, отличающийся тем, что, . с целью повьш1ения быстродействия при отработке без перерегулирования в выходном токе ступенчатого сигнала большой вепичины, в нега введены- блок нелинейности с характеристикой типа насьпдения и второй узел сравнения, причем выход первого узла сравнения через блок нелинейности с характеристикой типа насыщения подклю - чен к первому входу в торого узла сравнения, второй вход которого соединен с выходом апериодического звена, а выход второго узла сравнения , одключен к входу пропорционально- интегрального регулятора.
.

| название | год | авторы | номер документа |
|---|---|---|---|
| Источник питания электромагнита постоянного тока | 1987 |
|
SU1455987A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Задающее устройство | 1978 |
|
SU764078A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
Изобретение относится к технологическому оборудованию ускорителей заряженных частиц и-термоядерных установок, в частности к источникам питания электромагнитного оборудования постоянного тока. Изобретение позволяет повысить быстродействие при отработке без перерегулирования в выходном токе задающего ступенчатого сигнала большой величины. Цель достигается введением вiсхему между первым узлом сравнения и пропорционально- интегральным регулятором последовательно включенных блока нелинейности с харак±еристикой типа насыщения и второго узла сравнения, причем выход цепи нелинейности обратной связи, охватывающий пропорционально-интегральный регулятор, подключен к второму входу второго узла сравнения. Это позволяет при больших уровнях задающего сигнала поддерживать на выходе пропорционально-интегрального регулятора сигнал с ВЙ1СОКОЙ точностью, соответствующий максимальному напряжению в нагрузке. Этот сигнал будет поддерживаться до тех пор, пока введенный блок нелинейности удерживается иа ограничении. 1 ил. а Ш (Л
| УСТРОЙСТВО ДЛЯ ИЗБИРАТЕЛЬНОГО ВЫЗОВА ТЕЛЕФОННЫХ АППАРАТОВ | 1922 |
|
SU1000A1 |
| - Васильев С.Н | |||
| , Гусев С.А | |||
| , Ковалеве- кий И.И | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Appelo Н.С | |||
| and S.Van der Meet | |||
| The SPS auxiliary flagnet power supplies, CEPIV 77-12 | |||
| SPS Division, Geneva, 1977-23 p. | |||
