10
(Л
ел
00 05
ОО
посредством установленных на фланце 2 осей 9 и 10, входящих в выполненные в прижимах 7 овальные пазы 8. Одним концом двуплечие рычаги взаимо- денстнуют с наклонной поверхностью силового элемента 13, связанного посредством тяги 16 с втулкой 19, установленной на трубопроводе 1, а другим концом - с тьшьной поверхностью флан- ца 5 трубопровода А. Для обеспечения дистанционного управления и повышения надежности соединения прижимы 7 вьшол нены Г-образной формы и установлены в пазах фланца . трубопровода 1, при- чем с тыльной поверхностью фланца 5 трубопровода 4 прижимы 7 взa tмoдeйcтвуют В1гутренним торцом CBoeii короткой загнутой части, а на другой части . каждого прижима 7 установлены ролики 11, посредством которых каждый прижим взаимодействует с наклонной поверхностью силового элемента 13, выполненного в виде клина, шарнирно связанного посредством тяги 16 с втулкой 19, размещенного в зазоре между тьшьной поверхностью фланца 2 трубопровода 1 и роликами 11 и снабженного захватом 23 для взаимодействия с двуплечим рычагом при расфиксации соединения, при этом втулка 19 связана с приводом ее осевого перемещения. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕКРЫТИЯ ТРУБОПРОВОДА | 1992 |
|
RU2067254C1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Устройство для сборки тонкостенных изделий | 1974 |
|
SU524654A1 |
| Установка для бестраншейной прокладки трубопроводов прокалыванием | 1983 |
|
SU1158696A1 |
| Клепальный пресс | 1991 |
|
SU1754314A1 |
| КОНВЕЙЕР ДЛЯ РАЗМЕЩЕНИЯ И ПОДАЧИ ВЫСТРЕЛОВ | 1999 |
|
RU2165573C2 |
| Штамп для резки сортового проката | 1980 |
|
SU933306A1 |
| Устройство для прижима | 1990 |
|
SU1743778A1 |
| Захват для листовых изделий | 1987 |
|
SU1557057A1 |
Изобретение относится к области машиностроения. Цель изобретения - повышение надежности и обеспечение дистанционного управления. Соединение содержит два трубопровода 1 и 4. На фланце 2 трубопровода 1 установлены двуплечие рычаги в виде прижимов 7, соединенные с трубопроводами 1 и 4 посредством установленных на фланце 2 осей 9 и 10, входящих в выполненные в прижимах 7 овальные пазы 8. Одним концом двуплечие рычаги взаимодействуют с наклонной поверхностью силового элемента 13, связанного посредством тяги 16 с втулкой 19, установленной на трубопроводе 1, а другим концом - с тыльной поверхностью фланца 5 трубопровода 4. Для обеспечения дистанционного управления и повышения надежности соединения прижимы 7 выполнены Г-образной формы и установлены в пазах фланца 2 трубопровода 1, причем с тыльной поверхностью фланца 5 трубопровода 4 прижимы 7 взаимодействуют внутренним торцом своей короткой загнутой части, а на другой части каждого прижима 7 установлены ролики 11, посредством которых каждый прижим взаимодействует с наклонной поверхностью силового элемента 13, выполненного в виде клина, шарнирно связанного посредством тяги 16 с втулкой 19, размещенного в зазоре между тыльной поверхностью фланца 2 трубопровода 1 и роликами 11 и снабженного захватом 23 для взаимодействия с двуплечим рычагом при расфиксации соединения, при этом втулка 19 связана с приводом ее осевого перемещения. 2 ил.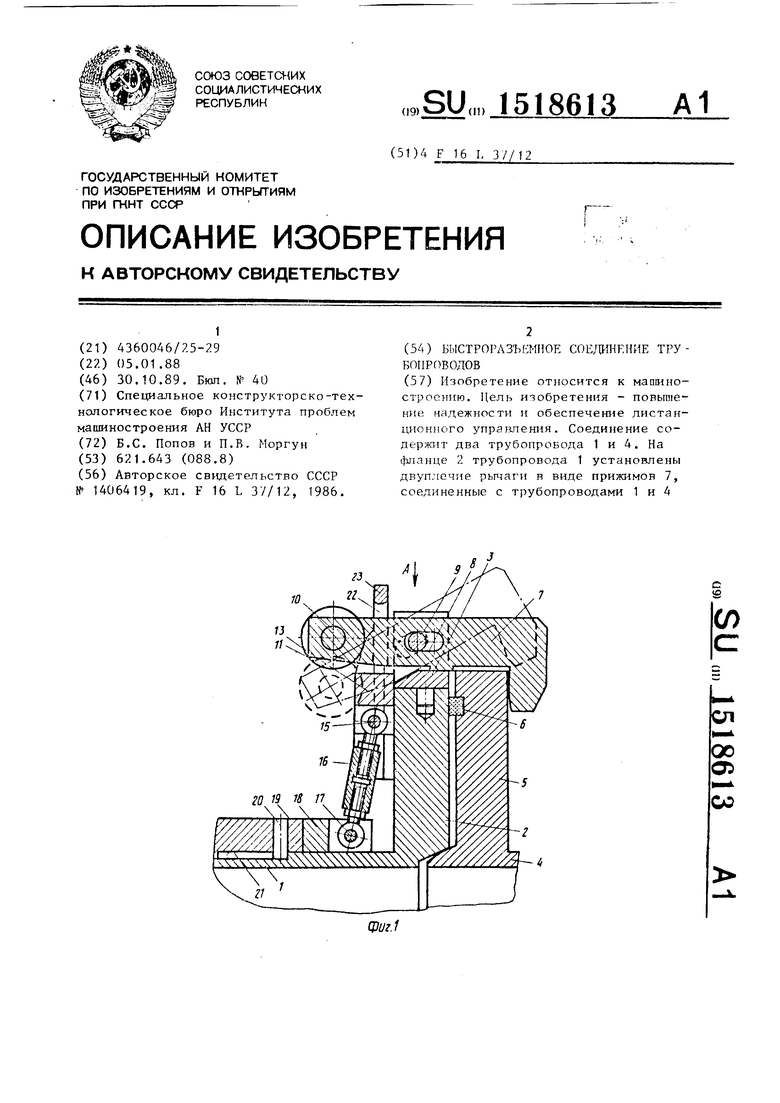
Изобретение относится к машиностроению и может быть использовано для соединения трубопроводов в вакуумных системах большого диаметра, тре- byromjtx равномерно расположенных по периметру значительных стягивающих усилий.
Цель изобретения - обеспечение дистанционного управления и повышение надежности быстроразъемного соединения трубопроводов за счет регулирования величины стягивающего усилия.
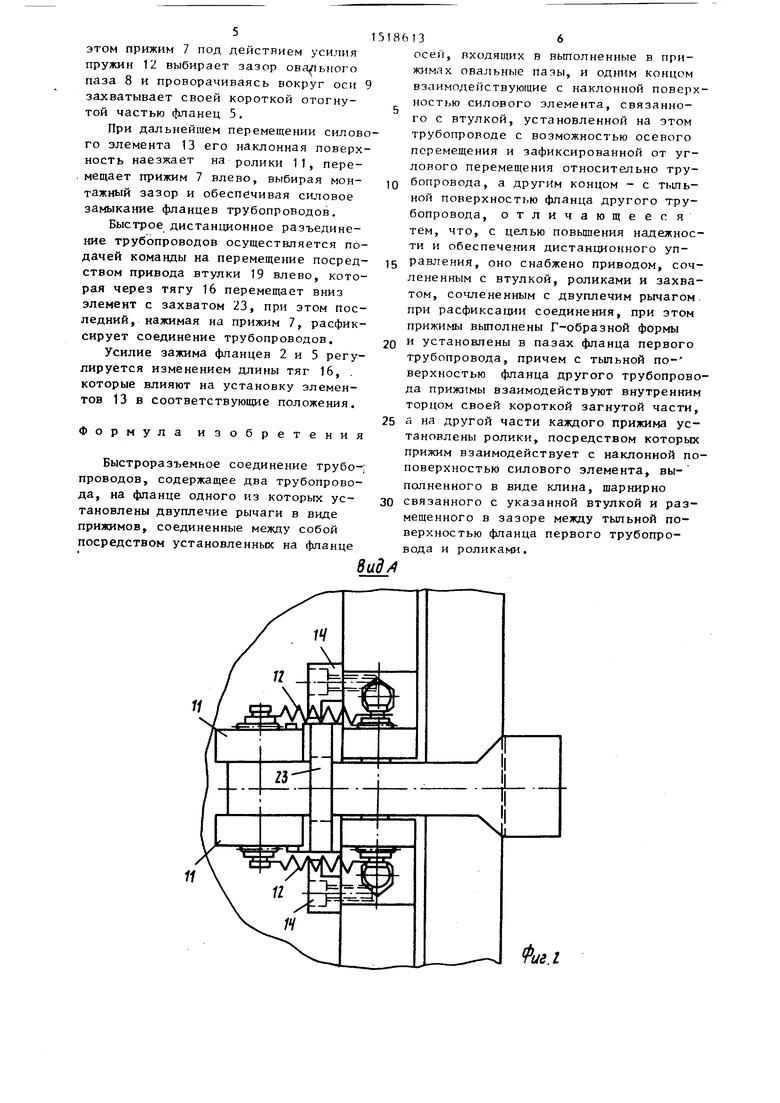
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - вид А на фиг. 1.
Быстроразъемное соединение трубопроводов включает трубопровод 1 с фланцем 2, на поверхности которого равномерно по периметру установлены стойки 3 и трубопровод 4 с фланцем 5. Между фланцами 2 и 5 установлен уплотнитель 6. В пазу каждой стойки 3 установлен двуплечий рычаг в виде прижима 7 Г-образной формы, через овальньй паз 8 которого проходит ось 9. На конце прижима 7 и на оси 10 установлены ролики 11. Ось 10 посредством пружин 12 растяжения кинематически связана с осью 9.
Силовой элемент 13, выполненный в виде клина, своей наклонной поверхностью взаимодействует с роликами 11 и имеет возможность перемещения в направляющих 14. Своей нижней частью силовой элемент 13 шарнирно связан с осью 15 регулируемой тяги 16, которая через вторую шарнирную ось 17 и
0
5
вилку 18 соединена с втулкой 19. Втулка 19 связана с приводом ее осевого перемещения (не показан). В ка- 5 честве привода втулки 19 может служить, например, пневмо- или гидроцилиндр или механическая передача. Во втулке 19 установлен выступ 20, входящий в паз 21 трубопровода 1, предотвращающий проворот втулки 19 относительно трубопровода 1. Элемент 13 на верхнем конце содержит окно 22, через которое проходит прижим 7, и захват 23 для взаимодействия с прижимом 7 при расфиксации соединения.
Соединение работает следующим образом.
В исходном расстыкованном положении втулка 19 находится в крайнем левом (по чертежу) положении, а клин 13 своим захватом 23 удерживает прижим 7 в крайнем верхнем зафиксированном положении.
Для стыковки трубопроводов 1 и 4 производится предварительное осевое сближение их фланцев 2 и 5, после чего подается команда на перемещение посредством привода осевого перемещения втулки 19 вправо, в результате чего втулка 19 начинает перемещаться вправо (по чертежу) к фланцу 2. Совместно со втулкой 19 начинает перемещаться силовой элемент 13, связанный с ней шарнирной тягой 16. При перемещении силового элемента 13 он своей опорной поверхностью скользит по торцовой поверхности фланца 2, | а его захват 23 освобождает прижим 7 от фиксированного положения. При
0
5
0
5
этом прижим 7 под действием усилия пружин 12 выбирает зазор овального паза 8 и проворачиваясь вокруг оси захватывает своей короткой отогнутой частью фланец 5.
При дальнейшем перемещении силовго элемента 13 его наклонная поверхность наезжает на ролики 11, перемещает прижим 7 влево, выбирая монтажный зазор и обеспечивая силовое замыкание фланцев трубопроводов.
Быстрое дистанционное разъединение трубопроводов осуществляется подачей команды на перемещение посредством привода втулки 19 влево, которая через тягу 16 перемещает вниз элемент с захватом 23, при этом последний, нажимая на прижим 7, расфик- сирует соединение трубопроводов.
Усилие зажима фланцев 2 и 5 регулируется изменением длины тяг 16, которые влияют на установку элементов 13 в соответствующие положения.
Формула
обретения
Быстроразъемное соединение трубо-: проводов, содержащее два трубопровода, на фланце одного из которых установлены двуплечие рычаги в виде прижимов, соединенные между собой посредством установленньос на фланце
186136
осей, входящих в выполненные в прижимах овальные пазы, и одьгим концом взаимодействующие с наклонной поверх- ностью силового элемента, связанного с втулкой, установленной на этом трубопроводе с возможностью осевого перемещения и зафиксированной от углового перемеп(ения относительно тру- 10 бопровода, а другим концом - с тыльной поверхностью фланца другого трубопровода, отличающееся тем, что, с целью повьшения надежности и обеспечения дистанционного уп- 15 равления, оно снабжено приводом, сочлененным с втулкой, роликами и захватом, сочлененным с двуплечим рычагом, при расфиксации соединения, при этом прижимы выполнены Г-образной формы 0 и установлены в пазах фланца первого трубопровода, причем с тыльной по- верхностью фланца другого трубопровода прижимы взаимодействуют внутренним торцом своей короткой загнутой части, 5 а на другой части каждого прижима установлены ролики, посредством которых прижим взаимодействует с наклонной по- поверхностью силового элемента, вы- полненного в виде клина, шарнирно 0 связанного с указанной втулкой и размещенного в зазоре между тыльной поверхностью фланца первого трубопровода и роликами.
8ид/1
И
иг.1
| Быстроразъемное соединение трубопроводов | 1986 |
|
SU1406419A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
