Область, к которой относится изобретение
Изобретение относится к использованию роботизированных устройств для обработки объемных объектов и может найти применение в области сельского хозяйства при обрезке и фигурной стрижке фруктовых и декоративных деревьев и кустарников, цветов, живых изгородей, в промышленности - при окрашивании сложных трехмерных поверхностей. Изобретение может быть полезно при окраске различных строительных объектов, а также в дефектоскопии и обследовании трубопроводов, сосудов высокого давления, зданий и сооружений.
Уровень техники
До сих пор подавляющее большинство операций по обработке поверхностей объемных и сложных несерийных объектов осуществляется вручную или в лучшем случае с применением форм так называемой малой механизации. Объемы таких работ однако постоянного растут, одновременно повышается сложность обработки таких объектов. Обработка выпускаемых крупными партиями изделий производится с помощью стационарного автоматизированного оборудования.
Известные роботизированные средства для обработки объемных объектов имеют множество недостатков, которые затрудняют их применение в реальных условиях и не позволяют полностью и качественно обработать объект без дополнительного использования ручных операций.
В уровне техники имеется информация о специализированных роботизированных устройствах и реализуемых при их использовании способах обработки объемных объектов сельскохозяйственного назначения. Эти устройства и способы имеют дело только с определенными видами объектов - фруктовыми деревьями и цветущими кустарниками и используются с целью удаления лишних веток и формирования кроны.
Так, в опубликованной заявке US 2012096823 раскрыто робототехническое устройство и реализуемый им способ обрезки плодовых деревьев. Устройство включает мобильное шасси с платформой, установленные на платформе многочисленные специализированные манипуляторы с инструментами для обрезки, модуль управления, систему позиционирования. Однако перемещение известного устройства происходит по определенному, не корректируемому маршруту, траектория перемещения рабочих инструментов заранее запрограммирована. Возможность внесения коррекций, связанных с рельефом местности, изменением области обработки и внезапными препятствиями не предусмотрена.
В патентном документе ЕР 0786201 раскрыт способ обработки крон деревьев с помощью роботизированного устройства, включающего мобильное шасси, перемещаемое в режиме полного автодвижения или с помощью трактора, многозвенный манипулятор с рабочим режущим инструментом на конце, дистанционные средства управления и позиционирования, систему управления и позиционирования. Этот способ применим только для выполнения обрезки деревьев в соответствии с заложенной программой по заданной траектории, не учитывает изменяющиеся условия произрастания растений, имеет небольшую зону действия, не позволяет производить обработку всей поверхности кроны, используется при обработке объектов ограниченной высоты. Использование для иных целей не предусмотрено.
Известные роботизированные средства и способы окраски используются в крупносерийном производстве и являются стационарными. В уровне техники отсутствуют сведения о перемещаемых роботизированных устройствах и способах управления процессом окраски.
В авторском свидетельстве SU 1065039 раскрыт робот для окраски изделий, содержащий установленную с возможностью перемещения по направляющей каретку с распылителем, и реализуемый им способ. При этом возможно окрашивание движущихся по конвейеру небольших серийно выпускаемых изделий, использование изобретения для штучных объектов, имеющих различные размеры и форму, не предусмотрено.
Из патента RU 2316399 известен способ нанесения краски при помощи устройства для нанесения цветного рисунка на поверхности зданий в соответствии с предварительно полученным отображением цифровой модели изображения, наложенным на цифровой объект, представляющий собой реальную поверхность объекта. Способ включает следующие этапы: приведение устройства нанесения в контакт с указанной поверхностью и перемещение его по поверхности, непрерывное измерение координат устройства нанесения путем использования бесконтактной системы измерения положения или дополнительных датчиков перемещения, нанесение краски в соответствии с упомянутым отображением в зависимости от измеренных координат, прекращение нанесения краски автоматически, если координаты по отношению к заданному порогу допустимого отклонения координаты не могут быть определены в достаточной мере точно или если краска уже была целиком нанесена на область координат наносимых краской элементов. В этом способе также не предусмотрено внесение коррекций в связи с изменением ориентации роботизированного устройства в реальных условиях местности, на которой производится обработка.
Таким образом, в настоящее время имеется потребность в разработке способа, который позволит проводить полную и качественную обработку сложных объемных объектов в условиях реальной местности - неровных поверхностей, изменения окружающей обстановки, изменения конфигурации самого обрабатываемого объекта.
В качестве ближайшего для заявленного изобретения аналога принят способ, реализуемый устройством по патентному документу ЕР 0786201, включающий использование роботизированного устройства для обработки объемных объектов - крон деревьев, манипулятор которого удерживает съемный рабочий инструмент.
Сущность изобретения
Задача, на решение которой направлено изобретение, состоит в создании способа для выполнения разнообразных операций по обработке сложных объемных объектов, учитывающего реальные условия произрастания или расположения такого объекта, в полностью автоматическом режиме с высокой производительностью, точностью и при минимальным участии оператора.
Технический результат, который достигается изобретением, состоит в обеспечении точной и полной автоматизированной обработки объемных объектов сложной формы в реальных условиях на месте их расположения.
Дополнительный технический результат состоит в расширении области применения.
Технический результат достигается за счет того, что способ обработки объемных объектов, включающий использование роботизированного устройства для обработки, манипулятор которого удерживает съемный рабочий инструмент, включает этапы, на которых:
а) последовательно перемещают роботизированное устройство для обработки на заранее рассчитанные или произвольно выбранные дискретные рабочие места в непосредственной близости от объемного объекта,
б) на каждом занятом роботизированным устройством для обработки рабочем месте с помощью системы позиционирования определяют реальные координаты и ориентацию роботизированного устройства для обработки,
в) для каждого занятого рабочего места с учетом размеров рабочего инструмента и мобильного шасси и определенных на этапе б) реальных координат и ориентации определяют возможность достижения рабочим инструментом из данного занятого рабочего места по крайней мере части области обработки объемного объекта,
при отсутствии такой области перемещают роботизированное устройство для обработки в новое рабочее место,
этапы а)-в) повторяют для нового рабочего места,
рассчитывают траекторию движения рабочего инструмента для части области обработки объемного объекта, достижимой из занятого рабочего места, и
осуществляют обработку части области обработки объемного объекта,
При этом при определении возможности достижения рабочим инструментом по крайней мере части области обработки из данного занятого рабочего места и расчете траектории движения рабочего инструмента исключают ранее обработанные части области обработки.
Технический результат усиливается за счет того, что используют роботизированное устройство для обработки, включающее мобильное шасси, установленный на нем манипулятор с адаптером рабочих инструментов, систему позиционирования и систему управления. Система позиционирования включает по крайней мере одну из следующих систем: систему ближнего радиолокационного действия, лазерную систему измерения расстояния, инерциальную систему, систему технического зрения и систему фотограмметрии.
Расширение области применения способа достигается за счет того, что в качестве объемных объектов для обработки используют зеленые насаждения, а в качестве рабочих инструментов - по крайней мере один из инструментов для формообразования: совместимые с адаптером рабочих инструментов мобильного роботизированного устройства садовые ножницы, секатор, фрезу для садовых насаждений, кусторез или пилу. В качестве рабочего инструмента используют инструмент для нанесения покрытия. Используют роботизированное устройство для обработки, включающее инструмент для дефектоскопии и/или обследования объекта обработки.
При описании способа обработки объемных объектов с использованием роботизированного устройства используются следующие термины и определения.
При этом в контексте данного изобретения под объемными объектами понимают трехмерные пространственные объекты, а также их частный случай - объекты, имеющие протяженные размеры по двум осям, т.е. практически плоские.
Объект обработки - объект, подлежащий формообразованию (например, растения).
Рабочее место - место расположения мобильного робота, где доступно выполнение операций инструментом.
Рабочий участок - участок местности, содержащий все рабочие места, объекты обработки и пространство между ними.
Позиционирование - перемещение объекта с заданной ориентацией в точку с заданными координатами.
Роботизированное устройство - роботизированный комплекс, обеспечивающий операции перемещения по рабочему участку между рабочими местами и обработки объемного объекта как в полностью автоматическом режиме, так и с участием оператора.
Мобильное шасси - устройство для размещения на нем подсистем роботизированного устройства и позиционирования его на рабочем участке.
Рабочий инструмент - оборудование, предназначенное для выполнения воздействия на объект обработки либо его исследования.
Манипулятор - устройство, имеющее не менее шести степеней свободы, предназначенное для точного позиционирования инструмента.
Область обработки - зона достижимости роботизированного устройства на рабочем месте и при движении к рабочему месту.
Определение положения и ориентации - получение координат и векторов ориентации.
Описание фигур чертежей
Далее сущность изобретения и возможность достижения технического результата будут более подробно раскрыты на примере осуществления способа обработки объемных объектов для конкретного применения - формообразования зеленых насаждений - и со ссылками на позиции чертежей, где:
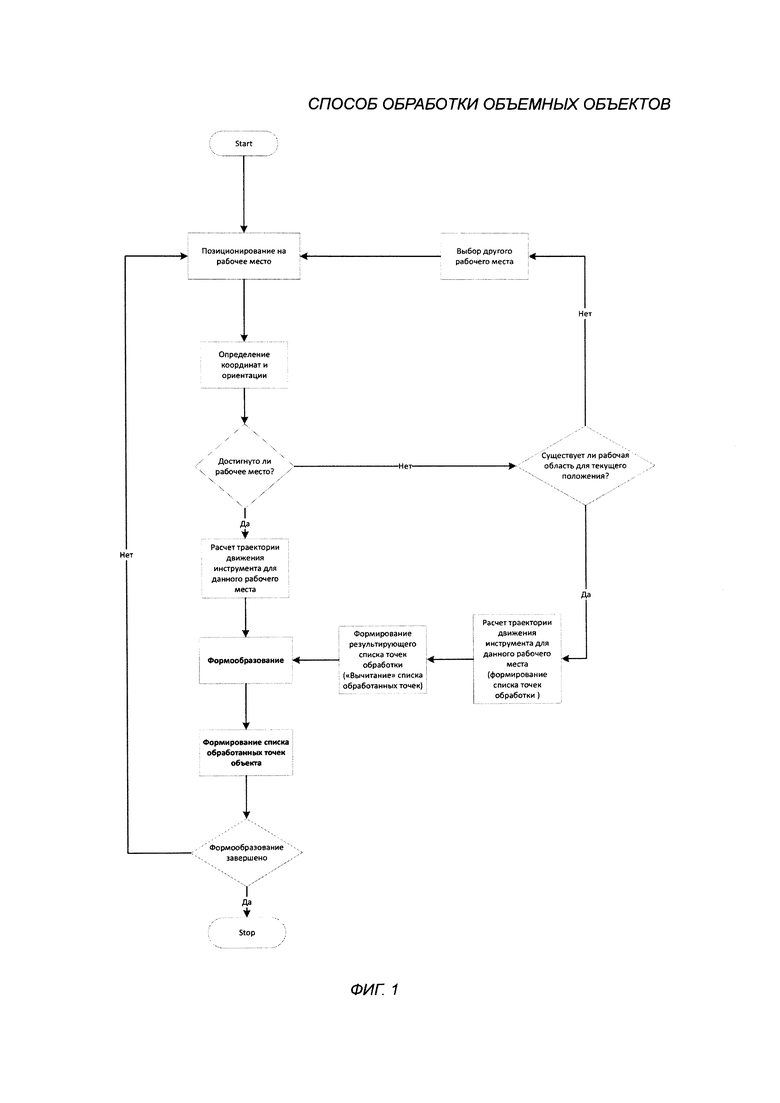
на фиг. 1 представлена блок-схема осуществления способа обработки объемных объектов,
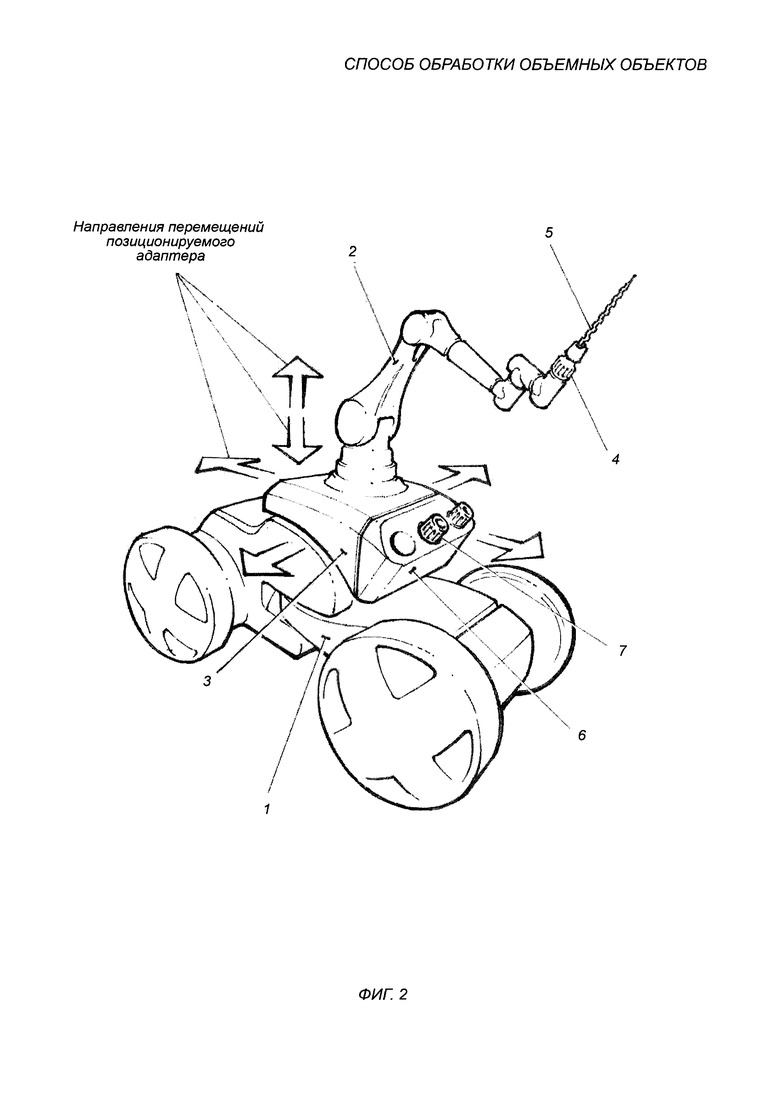
на фиг. 2 представлен аксонометрический вид роботизированного устройства для осуществления способа обработки объемных объектов.
На чертежах приняты следующие обозначения:
1 - мобильное шасси,
2 - манипулятор,
3 - позиционируемый адаптер манипулятора,
4 - адаптер рабочих инструментов,
5 - рабочий инструмент, установленный в адаптере рабочих инструментов,
6 - модуль хранения инструментов,
7 - сменные инструменты и датчики, размещенные в модуле хранения инструментов.
Пример осуществления изобретения
В качестве конкретного примера на фиг. 2 изображено устройство, используемое при осуществлении способа обработки объемных объектов. Это - роботизированное устройство для фигурного формообразования зеленых насаждений.. Оно включает мобильное шасси 1 с установленными на нем манипулятором 2 с адаптером 4 рабочих инструментов, модулем позиционирования и модулем управления (не показаны), позиционируемым адаптером 3 манипулятора и модулем 6 хранения рабочих инструментов. Мобильное шасси 1 представляет собой самоходное транспортное средство с платформой, возможно исполнение мобильного шасси в гусеничном и колесном вариантах.
Позиционируемый адаптер 3 манипулятора обеспечивает электромеханическое соединение манипулятора 2 с мобильным шасси 1, а также передачу управляющих воздействий, необходимых для функционирования манипулятор 2. Главная функция позиционируемого адаптера 3 - увеличение рабочей зоны манипулятора. Адаптер 3 манипулятора имеет собственную систему позиционирования, служащую для расширения рабочей области обработки на рабочем месте. Позиционируемый адаптер 3 манипулятора снабжен механизмом перемещения основания манипулятора в горизонтальной - вдоль мобильного шасси и в вертикальной плоскостях по командам системы управления - и выполнен с возможностью электромеханического соединения основания манипулятора 2 с мобильным шасси 1 и передачи управляющих воздействий от системы управления для функционирования манипулятора 2.
Механизм перемещения основания манипулятора может быть выполнен в форме дополнительной платформы, на которой жестко закреплено основание манипулятора. Дополнительная платформа по направляющим перемещается в горизонтальной плоскости, а перемещение по вертикали обеспечивается за счет развертывания телескопической направляющей.
Привода перемещения позиционируемого адаптера 3 по осям - независимые, могут быть в электрическом и гидравлическом исполнениях. В электрическом исполнении для каждого управления перемещением используют независимые электродвигатели. Управление электродвигателями осуществляется блоками управления приводом по соответствующим осям. Позиционирование адаптера происходит с заданной точностью. Управление движениями адаптера осуществляется модулем управления роботизированного устройства.
Модуль хранения 6 рабочих инструментов установлен на мобильном шасси и содержит сменные рабочие инструменты 7, снабженные средствами для установки, совместимыми с адаптером 4 рабочих инструментов. Средства для установки могут быть выполнены в виде ответной части адаптера 4 рабочих инструментов, соединяемых с ним люеровским соединением, например. Возможны иные типы соединений. Адаптер 4 рабочих инструментов и совместимые с ним ответные части средств для установки рабочих инструментов 7 обеспечивают электромеханическое соединение рабочего инструмента с манипулятором 2 и измерительного инструмента с мобильным шасси 1 и/или с манипулятором 2, а также передачу управляющих воздействий, необходимых для функционирования инструментов. Электрическое соединение этих средств обеспечивается через миниатюрные разъемы, установленные на совмещаемых частях.
Модуль 6 хранения инструментов обеспечивает хранение инструментов, необходимых для проведения тех или иных операций по формообразованию объектов или измерений. Модуль хранения 6 выполнен в виде закрепленного на мобильном шасси или на позиционируемом адаптере 3 блока. В модуле 6 хранения инструментов в посадочных гнездах размещены различные сменные рабочие инструменты. Набор инструментов не ограничен, определяется только поставленными задачами. Кроме того, здесь же размещены лазерный и ультразвуковой датчики для сканирования объекта обработки, соединяемые с модулем управления для передачи изображения объекта формообразования, если эти датчики выполнены сменными, а не размещены стационарно на адаптере 4 рабочих инструментов.
Благодаря наличию на мобильном шасси 1 модуля 6 хранения инструментов, роботизированное устройство может оснащаться необходимым типом инструмента. В данном случае - режущим инструментом для обрезки деревьев, в зависимости от типа зеленых насаждений и характера работы, 2d или 3d лазерным датчиком, ультразвуковым датчиком в зависимости от поставленной задачи. Работа устройства возможна как в автоматическом режиме, так и при непосредственном участии оператора.
Модуль управления включает блок памяти с набором программ обработки.
Модуль позиционирования включает систему ближнего радиолокационного действия, лазерную систему измерения расстояния, инерциальную систему, систему технического зрения и систему фотограмметрии.
Способ реализуется согласно алгоритму, представленному на фиг. 1, следующим образом.
Во-первых, роботизированное устройство в автоматическом режиме или под управлением оператора перемещают на рабочем участке в заранее рассчитанное или произвольно выбранное рабочее место в непосредственной близости от объемного объекта обработки - дерева, которому необходимо придать определенную форму. Эта форма запомнена в блоке памяти системы управления.
В связи с тем, что роботизированное устройство перемещается в условиях реальной местности, которая имеет уклоны и препятствия, возможно отклонение его от рассчитанного рабочего места, и, следовательно, изменение условий обработки. Для компенсации таких отклонений на занятом рабочем месте с помощью системы позиционирования определяют реальные координаты и ориентацию, например по осям трехмерной системы координат.
Система позиционирования включает средства позиционирования, которые выбраны из системы ближнего радиолокационного действия, лазерной системы измерения расстояния, инерциальной системы, системы технического зрения и системы фотограмметрии. Эти средства позволяют определить местоположение и ориентацию устройства в пространстве. Они подробно раскрыты, например, в патентных документах SU 1412459, RU 2506157, RU 2457946, RU 2316399.
Данные о реальных координатах и ориентации роботизированного устройства поступают в систему управления. Затем по заложенной в программном блоке системы управления программе и на основе данных о требуемой форме объекта обработки, с учетом размеров рабочего инструмента, размеров мобильного шасси, определенных реальных координат и ориентации роботизированного устройства определяют возможность достижения рабочим инструментом из данного занятого рабочего места хотя бы части области обработки - в данном случае части кроны дерева.
В случае положительного результата роботизированное устройство остается на занятом рабочем месте. Производится расчет траектории движения рабочего инструмента в части области обработки, достижимой с данного рабочего места (формируется список точек обработки). Перед этим лазерный датчик, расположенный в адаптере рабочего инструмента, сканирует объект, определяя реальную форму растения, а траектория рассчитывается с учетом состояния реального объекта. Далее от оператора или из системы управления поступает команда на привод манипулятора, который осуществляет перемещение рабочего инструмента по расчетной и теперь запомненной в блоке памяти системы управления траектории и производит обрезку части кроны дерева. Одновременно производится формирование списка точек обработки (для последующего вычитания этого списка, характеризующего уже обработанную часть области обработки объекта из общей области обработки).
Роботизированное устройство дискретно автоматически или в ручном режиме оператором перемещается в следующее расчетное или выбранное рабочее место. Процесс повторяется.
В случае, если расчеты показали невозможность достижения рабочим инструментом с данного рабочего места хотя бы части объекта, подается команда на перемещение роботизированного устройства в новое рабочее место, которое в общем случае может отличаться от следующего расчетного или выбранного дискретного рабочего места. Для этого нового рабочего места посредством системы позиционирования определяют координаты и ориентацию роботизированного устройства, снова рассчитывают возможность достижения уже из этой новой позиции кроны дерева и снова рассчитывают траекторию движения рабочего инструмента.
При обсчете второго и последующих рабочих мест (возможности достижения области кроны и траектории перемещения рабочего инструмента) из полной области обработки исключают ранее обработанные части. Соответствующая информация о них уже записана в блок памяти системы управления на предыдущих этапах. Перемещение роботизированного устройства в новые рабочие места и обрезка дерева осуществляется до полного завершения обработки, о чем свидетельствует полное соответствие полученной формы запомненному в блоке памяти цифровому образу.
В качестве инструментов для обработки кроны могут использоваться садовые ножницы, секатор, различные пилы, фрезы для садовых насаждений. Эти инструменты заменяются автоматически манипулятором по команде системы управления или вручную оператором.
Способ также применим для нанесения на объемные объекты различных красящих покрытий. Для этого используются специальные инструменты - кисти, распылители красок.
Возможно использовать такой способ и для обследования сложных штучных или габаритных объектов, например, в процессе проведения дефектоскопии летательных аппаратов, трубопроводов, сосудов высокого давления, контроля теплозащитных характеристик зданий и сооружений. Для этого используются ультразвуковые, тепловые датчики, средства голографической интерферометрии, вихревые фазовые преобразователи и т.д. Обработка таких объектов производится по сценарию, аналогичному описанному выше для процессов формообразования растений. Средства неразрушающего контроля также удерживаются и перемещаются манипулятором роботизированного устройства.
Промышленная применимость
Способ может быть осуществлен с помощью известных специалистам механизмов, электронных блоков, измерительных систем и датчиков, с использованием известных инструментов. Части роботизированного устройства, которое реализует заявленный способ, могут быть изготовлены из широко применяемых в промышленности материалов и на известном технологическом оборудовании. Поэтому заявленный способ обработки объемных объектов промышленно применим.
Способ не ограничивается приведенным в описании и показанным на чертежах конкретным примером, но может быть реализован во всех возможных видах вариантов без отступления от сущности и объема пунктов формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ОБЪЁМНЫХ ОБЪЕКТОВ | 2016 |
|
RU2623632C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| Средство транспортное роботизированное | 2023 |
|
RU2822947C1 |
| СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2021 |
|
RU2761924C1 |
| Способ управления манипулятором | 2017 |
|
RU2685831C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ В ПРОСТРАНСТВЕ ЭЛЕМЕНТОВ СБОРНЫХ КОНСТРУКЦИЙ | 2020 |
|
RU2759013C1 |
| Роботизированный мультифункциональный лазерный хирургический комплекс | 2018 |
|
RU2693216C1 |
| РОБОТИЗИРОВАННАЯ КУХОННАЯ СИСТЕМА (ВАРИАНТЫ), СПОСОБ УПРАВЛЕНИЯ И КУХОННЫЙ МОДУЛЬ С ЕЁ ИСПОЛЬЗОВАНИЕМ (ВАРИАНТЫ) | 2015 |
|
RU2743194C1 |
| Робот-опрыскиватель для садоводства | 2022 |
|
RU2790688C1 |
Изобретение относится к использованию роботизированных устройств для обработки объемных объектов и может найти применение в области сельского хозяйства, в промышленности, строительстве, а также в дефектоскопии. Способ включает использование роботизированного устройства для обработки, манипулятор которого удерживает съемный рабочий инструмент. Способ характеризуется тем, что включает этапы, на которых: а) последовательно перемещают роботизированное устройство для обработки на заранее рассчитанные или произвольно выбранные дискретные рабочие места в непосредственной близости от объемного объекта, б) на каждом занятом роботизированным устройством для обработки рабочем месте с помощью системы позиционирования определяют реальные координаты и ориентацию роботизированного устройства для обработки, в) для каждого занятого рабочего места с учетом размеров рабочего инструмента и мобильного шасси и определенных на этапе б) реальных координат и ориентации определяют возможность достижения рабочим инструментом из данного занятого рабочего места по крайней мере части области обработки объемного объекта. При отсутствии такой области перемещают роботизированное устройство для обработки в новое рабочее место, этапы а)-в) повторяют для нового рабочего места, рассчитывают траекторию движения рабочего инструмента для части области обработки объемного объекта, достижимой из занятого рабочего места, и осуществляют обработку части области обработки объемного объекта. При определении возможности достижения рабочим инструментом по крайней мере части области обработки из данного занятого рабочего места и расчете траектории движения рабочего инструмента исключают ранее обработанные части области обработки. Способ обеспечивает точную и полную автоматизированную обработку объемных объектов сложной формы в реальных условиях на месте их расположения. 5 з.п. ф-лы, 2 ил.
1. Способ обработки объемных объектов, включающий использование роботизированного устройства для обработки, манипулятор которого удерживает съемный рабочий инструмент, характеризующийся тем, что включает этапы, на которых:
а) последовательно перемещают роботизированное устройство для обработки на заранее рассчитанные или произвольно выбранные дискретные рабочие места в непосредственной близости от объемного объекта,
б) на каждом занятом роботизированным устройством для обработки рабочем месте с помощью системы позиционирования определяют реальные координаты и ориентацию роботизированного устройства для обработки,
в) для каждого занятого рабочего места с учетом размеров рабочего инструмента и мобильного шасси и определенных на этапе б) реальных координат и ориентации определяют возможность достижения рабочим инструментом из данного занятого рабочего места по крайней мере части области обработки объемного объекта,
при отсутствии такой области перемещают роботизированное устройство для обработки в новое рабочее место,
этапы а)-в) повторяют для нового рабочего места,
рассчитывают траекторию движения рабочего инструмента для части области обработки объемного объекта, достижимой из занятого рабочего места, и
осуществляют обработку части области обработки объемного объекта,
при этом при определении возможности достижения рабочим инструментом по крайней мере части области обработки из данного занятого рабочего места и расчете траектории движения рабочего инструмента исключают ранее обработанные части области обработки.
2. Способ по п. 1, отличающийся тем, что в качестве объемных объектов для обработки используют зеленые насаждения, а в качестве рабочих инструментов - по крайней мере один из инструментов для формообразования: совместимые с адаптером рабочих инструментов мобильного роботизированного устройства садовые ножницы, секатор, фрезу для садовых насаждений, кусторез или пилу.
3. Способ по 1, отличающийся тем, что в качестве рабочего инструмента используют инструмент для нанесения покрытия.
4. Способ по 1, отличающийся тем, что используют роботизированное устройство для обработки, включающее мобильное шасси, установленный на нем манипулятор с адаптером рабочих инструментов, систему позиционирования и систему управления.
5. Способ по п. 4, отличающийся тем, что система позиционирования включает по крайней мере одну из следующих систем: систему ближнего радиолокационного действия, лазерную систему измерения расстояния, инерциальную систему, систему технического зрения и систему фотограмметрии.
6. Способ по п. 4, отличающийся тем, что используют роботизированное устройство для обработки, включающее инструмент для дефектоскопии и/или обследования объекта обработки.
| РОБОТ-ОБРЕЗЧИК | 2008 |
|
RU2409931C2 |
| Лесопромышленный робот | 1981 |
|
SU954212A1 |
| EP 0786201 A1, 30.07.1997. | |||

