2.1-2.П+1, источники 3 света, модулятор 4 светового сигнала, формирователь 5 импульсов, группу элементов И 6.1-6.П, группу счетчиков 7.1-7.П, блок 8 дешифрации типоразмера предмета, блок 9 управления записью и чте-. нием и блок 10 памяти. В устройстве
обеспечивается расширение класса опознаваемых предметов, реализуется режим автоматического обучения робота опознаванию типов предметов, различных по габариту, при работе в ро- бототехнических комплексах, i з.п. ф-лы, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознавания подвижных объектов | 1988 |
|
SU1695337A1 |
| Устройство для распознавания и учета предметов по типоразмеру | 1987 |
|
SU1460731A1 |
| Устройство управления доступом к памяти для обмена массивами данных в многопроцессорной системе | 1989 |
|
SU1633418A1 |
| Устройство для ввода-вывода дискретных сигналов микроЭВМ | 1989 |
|
SU1681306A1 |
| Устройство для формирования тестовых воздействий | 1987 |
|
SU1476473A1 |
| Устройство для управления роботом | 1983 |
|
SU1228074A1 |
| Устройство для сопряжения источников и приемников с магистралью | 1986 |
|
SU1363227A2 |
| Репрограммируемое постоянное запоминающее устройство | 1989 |
|
SU1695384A1 |
| Устройство для сопряжения ЦВМ с внешними устройствами | 1989 |
|
SU1784840A1 |
| Устройство для тестового диагностирования | 1984 |
|
SU1213481A1 |
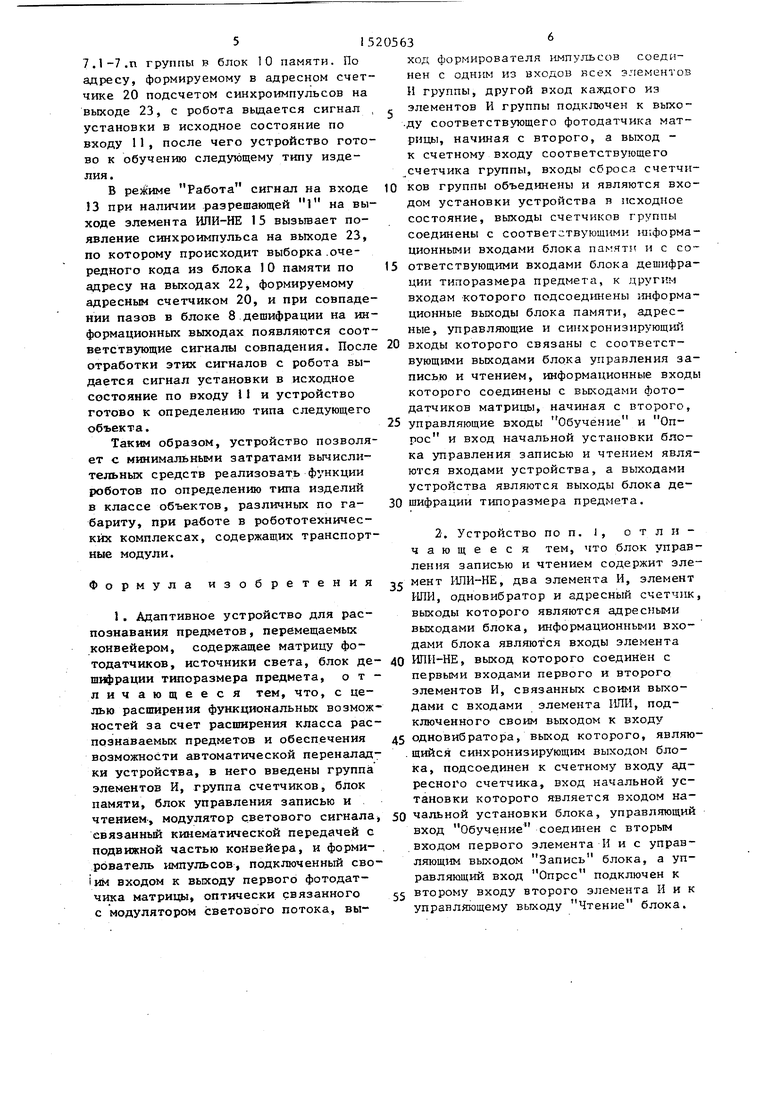
Изобретение относится к робототехнике и может быть использовано в системах управления роботами, работающими в комплексе с транспортером и имеющими режим обучения. Целью изобретения является расширение функциональных возможностей за счет расширения класса распознаваемых предметов и обеспечения возможности автоматической переналадки устройства. Адаптивное устройство для распознавания предметов, перемещаемых конвейером, содержит матрицу 1 фотодатчиков 2.1-2.N+1, источники 3 света, модулятор 4 светового сигнала, формирователь 5 импульсов, группу элементов И 6.1-6.N, группу счетчиков 7.1 - 7.N, блок 8 дешифрации типоразмера предмета, блок 9 управления записью и чтением и блок 10 памяти. В устройстве обеспечивается расширение класса опознаваемых предметов, реализуется режим автоматического обучения робота опознаванию типов предметов, различных по габариту, при работе в робототехнических комплексах. 1 з.п.ф-лы, 2 ил.
Изобретение относится к робототехнике и может быть использовано в сие- темах управления роботами, работающи- ми в комплексе с транспортером и имеющими режим обучения.
Цель изобретения - расширение функциональных возможностей за счет рас- щирения класса распознаваемых предме-- тов и обеспечения возможности автоматической переналадки устройства.
На фиг. I приведена функциональная схема адаптивного устройства для распознавания предметой, перемещаемых конвейером; на фиг. 2 - функциональная схема блока управления записью и чтением.
Адаптивное устройство для распознавания предметов, перемещаемых кон- вейером, содержит (фиг.1) матрицу Г фотодатчиков .2.1-2.n+l, источники 3 света, модулятор 4 светового сигнала, формирователь 5 импульсов, группу элементов И 6.1-б.п, группу счетчи- ков 7.1-7.П, блок 8 дешифрации типоразмера предмета, блок 9 управления записью и чтением и блок 10 памяти а также входы . устройства.
Блок 9 управления записью и чтени- ем содержит (фиг.2) элемент ИЛИ-НЕ 15 первый 16 и второй 17 элементы И, элемент ИЛИ 18, одновибратор 19, адресный счетчик 20, входы 21 и выходы 22 и 23 блока 9.
Адаптивное устройство для распознавания -предметов., перемещаемьк конвейером, работает следующим образом.
В исходном состоянии счетчики 7.1- 7.П обнулены сигналом по входу 11 ус- тановки устройства, логические О с выходов фотодатч1 ков 2.1-2.i, вы- рабатьшаемые при засветке их источ - никами 3 света, блокируют прохрждение импульсов с формирователя 5 импульсов элементы И 6.1-б.п группы, нулевое состояние разрядов счетчиков 7.1-7.п группы дешифруется блоком 8 дешифрации типоразмера предмета, как
отсутствие изделия в рабочей зоне робота. Адресньй счетчик 20 обнулен сигналом по входу I4 начальной установки. При движении транспортера модулятор 4 светового сигнала периодически перекрывает луч от источника 3 света к фотодатчику 2,п+1, что вызывает появление на его выходе сигналов, синхронньк перемещению транс- портера, которые преобразуются формирователем 5 импульсов в импульсы пря- моугольцой формы, частота которых пропорциональна скорости движения транспортера. Перемещаемое транспортером изделие, ориентированное на его рабочей поверхности, перекрьшает лучи с источника 3 света на фотодатчиках 2.1 (i « 1,..,,п), при этом на их вькодах появляются логические VI, разрешающие прохождение импульсов с формирователя 5 импульсов через зле- менты И 6.1-б.п группы к счетчикам 7.I-7.п группы, одновременно блокируется генерация синхроимпульсов на выходе 23 в блоке 9 управления записью, и чтением. Каждый из счетчиков 7.1 (i I,...,п) работает в режиме счета импульсов с формирователя 5 импульсов с момента перекрытия движущимся изделием луча на соответствующем фотодатчике 2.1 (1 ,,..п) до момента появления луча при выходе изделия из зоны действия фотодатчи- JKa 2.1. После появления луча на последнем фотодатчике и его срабатывания в блоке 9 управления записью чтением на выходе элемента ИЛИ-НЕ 15 появляется логическая 1, разрешающая прохождение сигналов с входов 12 и 13 через элементы И 16 и 17 и элемент ИЛИ 18 к одновибратору 19, формирующему синхроимпульс на выходе 23 блока.
В режиме Обучение по синхроимпульсу с выхода 23 блока 9 происходит занесение кода, соответствующего типу изделия с выходов счетчиков
В режиме Работа сигнал на входе 13 при наличии разрешающей 1 на выходе элемента ИЛИ-НЕ 15 вызьшает появление синхроимпульса на выходе 23, по которому происходит выборка.очередного кода из блока 1 О памяти по адресу на выходах 22, формируемому адресным счетчиком 20, и при совпадении пазов в блоке 8 дешифрации на информационных выходах появляются соответствующие сигналы совпадения. После отработки этих сигналов с робота выдается сигнал установки в исходное состояние по входу I1 и устройство готово к определению типа следующего объекта.
Таким образом, устройство позволяет с минимальными затратами вычислительных средств реализовать функции роботов по определению типа изделий в классе объектов, различных по габариту, при работе в робототехничес- кйх комплексах, содержащих транспортные модули.
Формула изобретения
чтением-, модулятор светового сигнала, 50 чальной установки блока, управляющий
вход Обучение соединен с вторым входом первого элемента И и с управляющим выходом Запись блока, а управляющий вход Опрсс подключен к второму входу второго элемента И и к
связанный кинематической передачей с подвижной частью конвейера, и формирователь импульсов, подключенный сво- 1им входом к выходу первого фотодатчика матри1д 1, оптически связанного с модулятором светового потока, вы55
управляющему выходу Чтение блока.
ход формирователя импульсов соединен с одним из входов всех з.чементов И группы, другой вход каждого из
, элементов И группы подключен к выхо- ду соответствующего фотодатчика матрицы, начиная с второго, а выход - к счетному входу соответствующего счетчика группы, входы сброса счетчи10 ков группы объединены и являются входом установки устройства в исходное состояние, выходы счетчиков группы соединены с соответствующими шгформа- ционными входами блока памяти и с со15 ответетвующими входами блока дешифрации типоразмера предмета, к другим входам которого подсоед1шены 1шформа- ционные выходы блока памяти, адресные, управляющие и снихронизирующи
20 входы которого связаны с соответствующими выходами блока управления записью и чтением, информационные входы которого соединены с выходами фотодатчиков матрицы, начиная с второго,
25 управляющие входы Обучение и Опрос и вход начальной установки блока управления записью и чтением являются входами устройства, а выходами устройства являются выходы блока де30 шифрации типоразмера предмета.
1 , о т л и - я тем, что блок управ- и чтением содержит эле- с мент 1-1ЛИ-НЕ, два элемента И, элемент ИЛИ, одновибратор и адресный счетчик, выходы которого являются адресными выходами блока, информационными входами блока являются входы элемента 0 ИПИ-НЕ, выход которого соедин ен с первыми входами первого и второго элементов И, связанных своими выходами с входами элемента ИЛИ, подключенного своим выходом к входу 5 одновибратора, выход которого, являю- .щийся синхронизирующим выходом блока, подсоединен к счетному входу адресного счетчика, вход начальной установки которого является входом навход Обучение соединен с вторым входом первого элемента И и с управляющим выходом Запись блока, а управляющий вход Опрсс подключен к второму входу второго элемента И и к
55
управляющему выходу Чтение блока.
фиг. 2
Редактор О.Головач
Составитель П.Васильев
Техред м.Ходанич Корректор Л.Бесквд
Заказ 6761/52
Тираж 668
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГК СССР Т13035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Подписное
| Устройство для управления адаптивным роботом | 1981 |
|
SU1004972A1 |
| Устройство для распознавания и учета предметов,перемещаемых конвейером | 1980 |
|
SU888150A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для сортировки деталей на конвейере по типоразмеру | 1977 |
|
SU636045A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
