Изобретение относится к мапшно- строению, в частности к манипуляторам и роботам с цикловым программным управлением, и может быть использовано для загрузочно-погрузочных работ.
Целью изобретения является расширение технологических возможностей за счет ориентирования стержнеобраз- ных деталей, имеющих разные диаметры на концах.
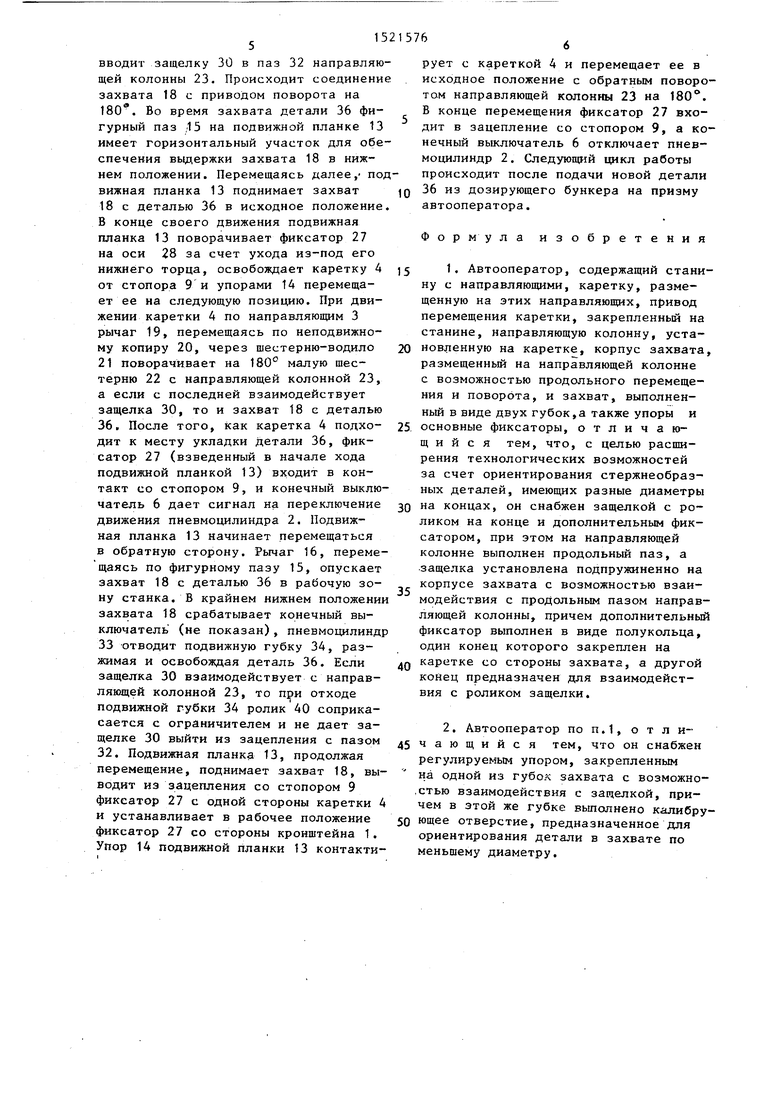
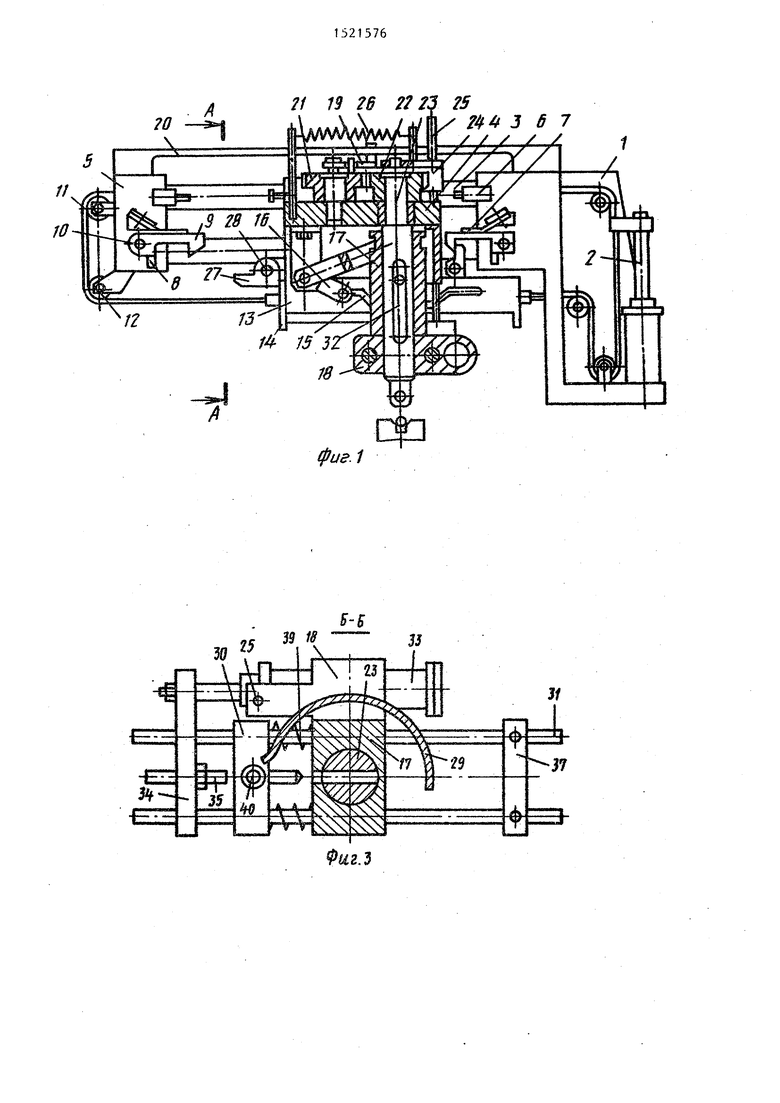
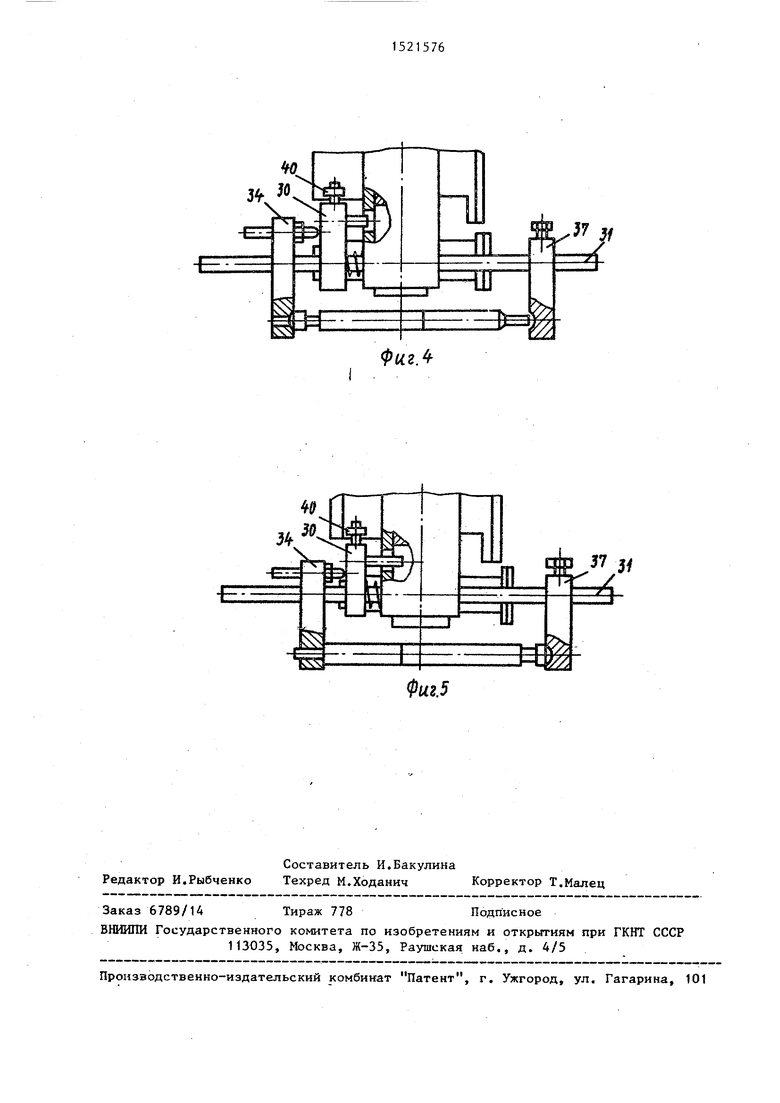
На фиг. 1 схематично изображен автооператор; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез В-Б на фиг. 2; на фиг. А - схема взаимодействия регулируемого упора, защелки и поворотной колонны при правильном положении детали; на фиг. 5 - то же, ,при неправильном положении детали.
Автооператор состоит из станины, например в виде кронштейна 1 (см, фиг.1), на котором установлены пневмо цилиндр 2 и направляющие 3 с подвижной кареткой 4. На конце направляющих 3 закреплен упор 5. Кронштейн 1 и упор 5 со стороны каретки 4 снабжены конечными вь ключателями 6, пружинами 7, ограничителями 8 и стопорами 9, закрепленнь ми на осях 10. Каретка 4 связана с пневмоцилиндром 2 посредст- ном троса 11j блоков t2 и подвижной планки 13. Подвижная планка 13 имеет упоры 14, ограничивающие ее перемещение относительно каретки 4, и фигурный паз 15, по которому контактирует рычаг 16, связанный с корпусом 17 захвата 18. На каретке 4. установлен рычаг 19, один конец которого контактирует с неподвижным копиром 20, а другой подвижно закреплен на большой шестерне-водиле 21, находящейся в зацеплении с малой шестерней 22. Шестерня 22 закреплена на направляющей колонне 23. На верхней части направляющей колонна 23 установлен рычаг 24, который стержнем 25 связан с за- .хватом 18 и имеет пружину 26 для фиксации крайних положений захвата 18 и выборки люфтов при повороте захвата на 180. Над подвижной планкой 13 на каретке 4 установлены основные фиксаторы 27 на осях 28, которые постоянно находятся в контакте с подвижной планкой 13 и попеременно (в
5
0 5 о ,
ленной на направляющих 31 захвата 18. Корпус 17 вместе с захватом 18 имеет возможность вертикального перемещения по направляющей колонне 23 от рычага 16 и вращения (поворота) вместе с колонной 23 за счет защелки
30,взаимодействующей с пазом 32 направляющей колонны 23. На захвате
18 установлен пневмоцилиндр 33, который штоком связан с подвижной губкой 34 захвата 18, имеющей в верхней части регулируемый упор 35, а в нижней - калибрующее отверстие диаметром, равным наименьшему диаметру конца детали 36 (заготовки). Подвижная губка 34 установлена на направляющих
31.Для обеспечения работы автооператора со стержнеобразньми деталями 36 различной длины неподвижная губка 37 захвата 18 может устанавливаться в любом месте направляющих 31 и затем крепится винтами 38. Защелка 30 снабжена пружинами 39, с помощью которых выходит из контакта с пазом 32 ко,лонны 23, и имеет ролик 40 для взаимодействия с фиксатором 29.
Автооператор работает следующим образом.
Деталь 36 из бункера-дозатора поступает на призму автооператора, и подается сигнал на включение пневмо- цйлиндра 2. Трос 11 через блоки 12 сначала перемещает подвижную планку 13, так как каретка 4 удерживается на месте за счет сцепления фиксатора 27 со стопором 9 кронштейна 1. Елан- ка 13, перемещаясь, поворачивает с помощью фигурного паза 15 рычаг 16, который опускает корпус 17с захватом 18 к детали 36, Как только захват 18 опустится до уровня детали 36, срабатыва.ет конечный выключатель (не показан), шток пневмоцилиндра 33 jl5 втягивается и подвижная губка 34 сближается с неподвижной губкой 37, зажимая деталь 36. Если деталь 36 ориентирована правильно на призме автоопе- ратора, т.е. конец, имеющий наименьший диаметр, обращен в сторону неподвижной губки 37, то регулируемый упор 35 подвижной губки 34 перемещает защелку 30 на 5-6 мм, но не вводит ее в контакт с пазом 32 направляю0
0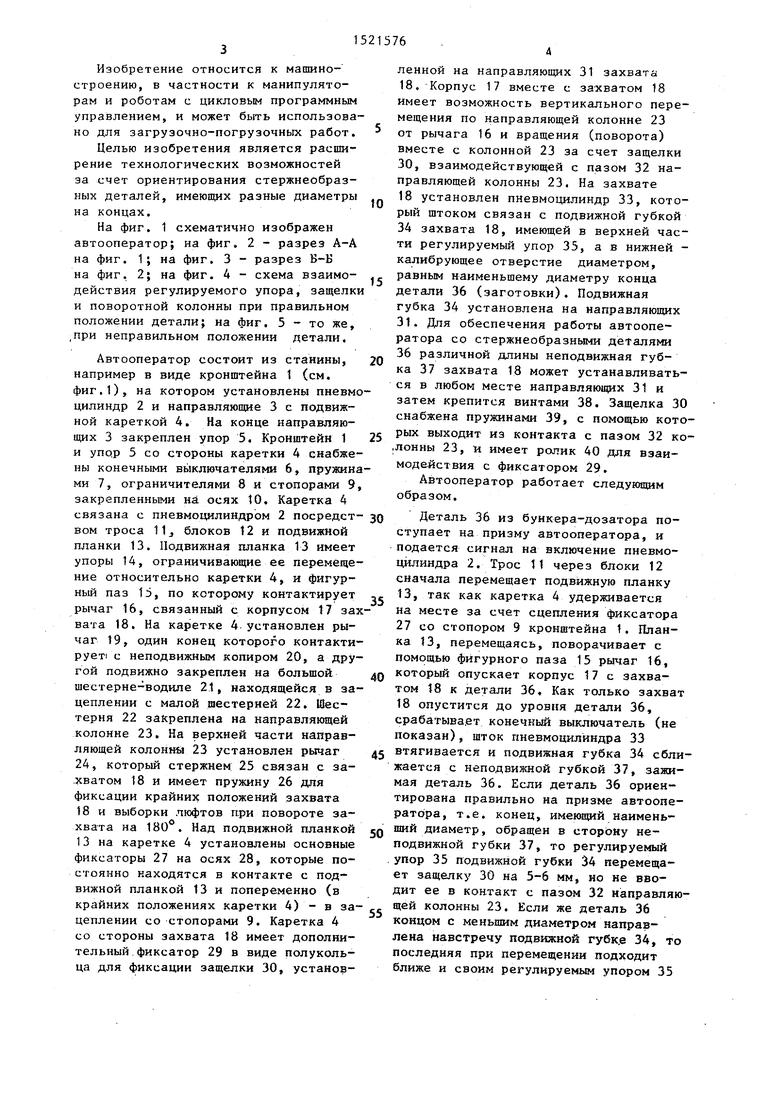
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1982 |
|
SU1033288A1 |
| Автооператор | 1988 |
|
SU1576271A2 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Моечно-сушильная установка | 1986 |
|
SU1430124A1 |
| Автооператор | 1983 |
|
SU1144842A2 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Манипулятор для кантования корпусных деталей | 1990 |
|
SU1750941A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
Изобретение относится к машиностроению, в частности к манипуляторам и роботам с цикловым программным управлением, и может быть использовано для загрузочно-погрузочных работ. Целью изобретения является расширение технологических возможностей за счет ориентирования стержнеобразных деталей, имеющих разные диаметры на концах. Для этого на верхней части направляющей колонны установлен рычаг 24, который стержнем 25 связан с захватом 18 и имеет пружину 26 для фиксации крайних положений захвата 18 и выборки люфтов при повороте захвата на 180°. На каретке 4 со стороны захвата 18 имеется дополнительный фиксатор 29 в виде полукольца для фиксации защелки 30, установленной на направляющих 31 захвата 18. Корпус 17 вместе с захватом 18 имеет возможность вертикального перемещения по направляющей колонне от рычага 16 и вращения (поворота) вместе с колонной за счет защелки 30, взаимодействующей с пазом 32 напраляющей колонны. На подвижной губке 34 захвата 18 в верхней части закреплен регулируемый упор 35, а в нижней выполнено калибрующее отверстие диаметром, равным наименьшему диаметру конца детали 36. Защелка 30 снабжена пружинами 39, с помощью которых выходит из контакта с пазом направляющей колонны и имеет ролик 40 для взаимодействия с фиксатором 29. 1 з.п. ф-лы, 5 ил.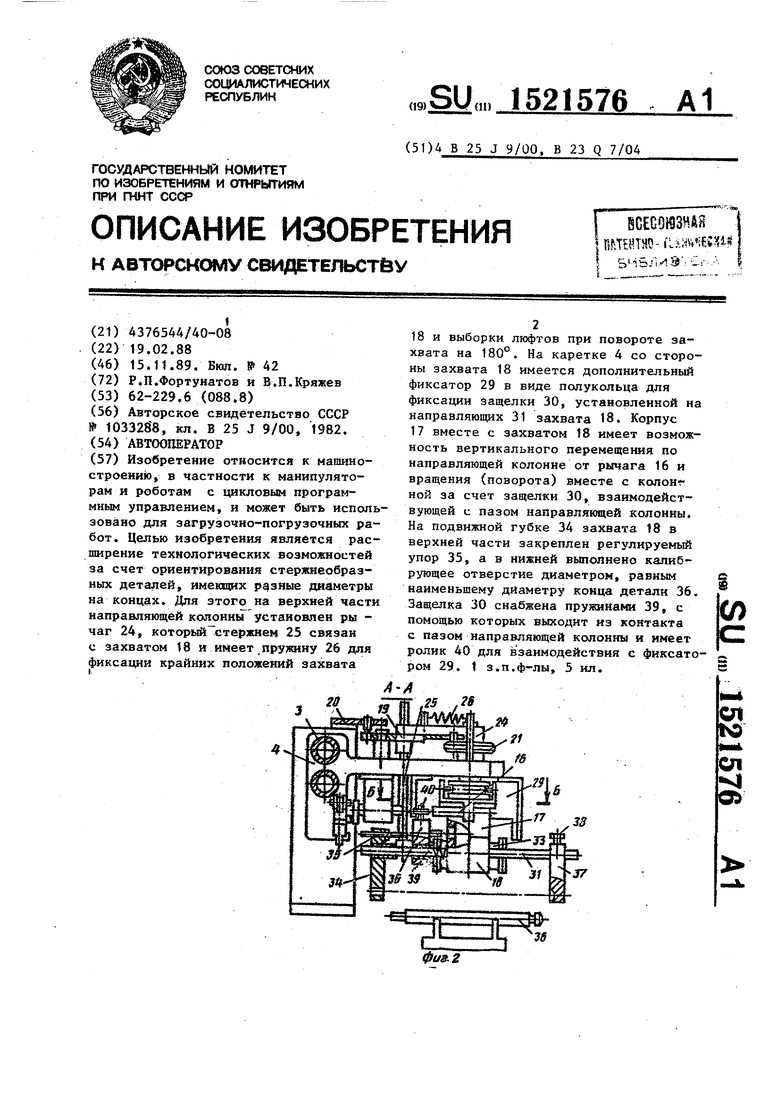
крайних положениях каретки 4) - в за- ,, щей колонны 23. Если же деталь 36 цеплении со стопорами 9. Каретка 4 концом с меньшим диаметром направ- со стороны захвата 18 имеет дополнительный фиксатор 29 в виде полукольца для фиксации защелки 30, установлена навстречу подвижной губк.е 34, последняя при перемещении подходит ближе и своим регулируемым упором
щей колонны 23. Если же деталь 36 концом с меньшим диаметром направ-
лена навстречу подвижной губк.е 34, то последняя при перемещении подходит ближе и своим регулируемым упором 35
вводит защелку 30 в паз 32 направляющей колонны 23. Происходит соединение захвата 18 с приводом поворота на 180. Во время захвата детали 36 фигурный паз /15 на подвижной планке 13 имеет горизонтальный участок для обеспечения выдержки захвата 18 в нижнем положении. Перемещаясь далее,- под вижная планка 13 поднимает захват 18 с деталью 36 в исходное положение В конце своего движения подвижная планка 13 поворачивает фиксатор 27 на оси 28 за счет ухода из-под его нижнего торца, освобождает каретку 4 от стопора 9 и упорами 14 перемещает ее на следующую позицию. При движении каретки 4 по направляющим 3 рычаг 19, перемещаясь по неподвижному копиру 20, через шестерню-водило 21 поворачивает на 180° малую шестерню 22 с направляющей колонной 23, а если с последней взаимодействует защелка 30, то и захват 18 с деталью 36, После того, как каретка 4 подходит к месту укладки детали 36, фиксатор 27 (взведенный в начале хода подвижной планкой 13) входит в контакт со стопором 9, и конечный выключатель 6 дает сигнал на переключение движения пневмоцилиндра 2. Подвижная планка 13 начинает перемещаться в обратную сторону. Рычаг 16, перемещаясь по фигурному пазу 15, опускает захват 18 с деталью 36 в рабочую зону станка. В крайнем нижнем положении захвата 18 срабатывает конечный выключатель (не показан), пневмоцилиндр 33 -отводит подвижную губку 34, разжимая и освобождая деталь 36. Если защелка 30 взаимодействует с направляющей колонной 23, то отходе подвижной губки 34 ролик 40 соприкасается с ограничителем и не дает защелке 30 выйти из зацепления с пазом 32. Подвижная планка 13, продолжая перемещение, поднимает захват 18, выводит из зацепления со стопором 9 фиксатор 27 с одной стороны каретки 4 и устанавливает в рабочее положение фиксатор 27 со стороны кронштейна 1. Упор 14 подвижной планки 13 контактирует с кареткой 4 и перемещает ее в исходное положение с обратным поворотам направляющей колонны 23 на ISO. В конце перемещения фиксатор 27 входит в зацепление со стопором 9, а конечный выключатель 6 отключает пневмоцилиндр 2. Следующий цикл работы происходит после подачи новой детали 36 из дозирующего бункера на призму автооператора.
Формула изобретения
1« Автооператор, содержащий станину с направляющими, каретку, размещенную на этих направляющих, привод перемещения каретки, закрепленный на станине, направляющую колонну, установленную на каретке, корпус захвата, размещенный на направляющей колонне с возможностью продольного перемещения и поворота, и захват, выполненный в виде двух губок,а также упоры и
основные фиксаторы, отличающийся тем, что, с целью расширения технологических возможностей за счет ориентирования стержнеобраз- ных деталей, имеющих разные диаметры
на концах, он снабжен защелкой с роликом на конце и дополнительным фиксатором, при этом на направляющей колонне выполнен продольный паз, а защелка установлена подпружиненно на корпусе захвата с возможностью взаимодействия с продольным пазом направляющей колонны, причем дополнительный фиксатор выполнен в виде полукольца, один конец которого закреплен на
каретке со стороны захвата, а другой конец предназначен для взаимодействия с роликом защелки.
/
// J9 гВ ///J 25
2 3 6 7 / / / / /
/
фиг.1
т.Ъ
Л
31
0«г
Фиг.5
| Автооператор | 1982 |
|
SU1033288A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
