Изобретение относится к строительному машиностроению, в частности отделочным манипуляторам и агрегатам, и может быть иснользовано в строительстве для механизации и автоматизации работ.
Цель изобретения - снижение габаритов и металлоемкости, а также повышение надежности.
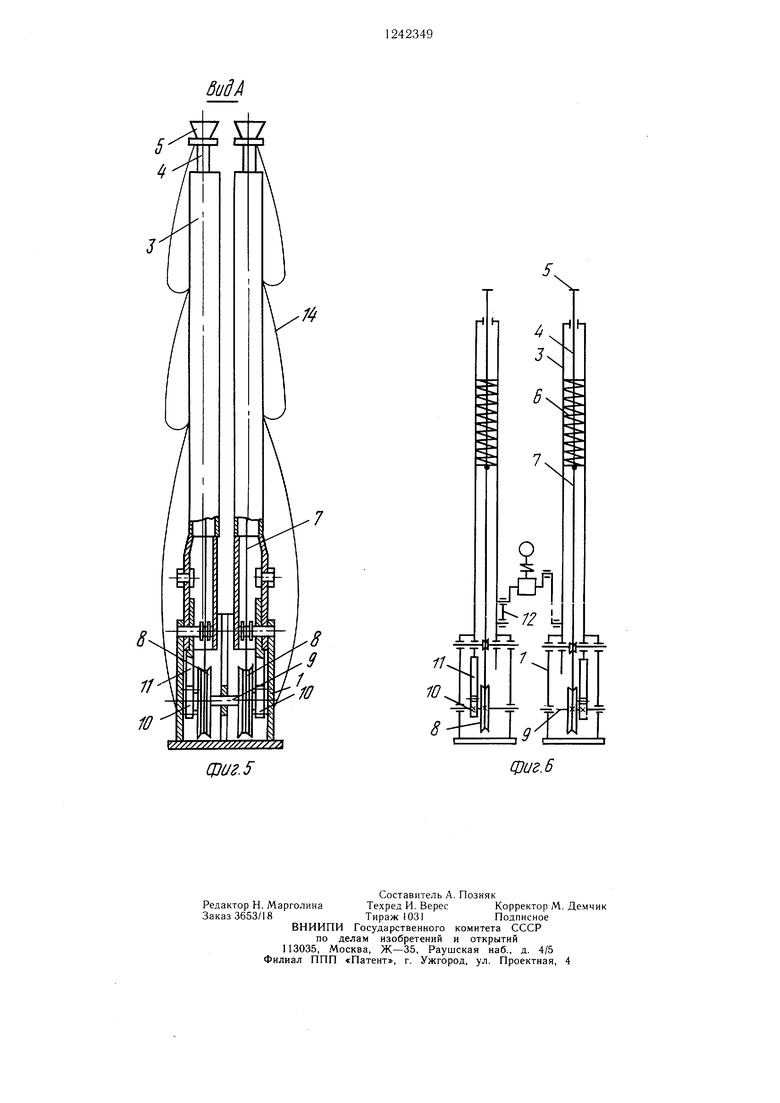
На фиг. 1 изображен манипулятор, об- .щий. вид; на .фиг. 2 и 3 - кинематическая с.хема одной руки манипулятора; на ,фиг. 4 - рука манипулятора, общий вид; на фиг. 5 - вид А на фиг. 4; на фиг. 6 - кинематическая схема с двумя руками.
Манипулятор содержит станину 1 и качающиеся руки 2.
Каждая рука манипулятора имеет корпус 3, внутри которого установлена выдвижная штанга 4, несущая рабочий орган, например форсунку 5. Штанга 4 пружиной 6 поджата к верхней части корпуса 3. На конце штанги 4 закреплен гибкий элемент 7 (например, трос), запассованный на барабан 8, на одном валу 9 с которым установлено зубчатое колесо 10, взаимодействующее с зубчатым сектором 11. Вал 9 смонтирован на станине 1. Сектор 11 жестко закреплен на конце штанги 4, которая
посредством щатуна 12 связана с кривошипом 13 привода качания. К форсунке 5 покрасочный материал подается по шлангу 14.
Манипулятор работает следующим образом.
В исходном вертикальном положении руки пружина 6 внутри корпуса 3 сжата и штанга 4 находится в нижнем положении. При движении корпуса руки под
действием кривошипа 13 привода качания в крайнем положении сектор 1 i через колесо 10 приводит во вращение барабан 8 с тросом 7. Трос 7, сматываясь с барабана 8, постепенно освобождает щтангу 4, которая под действием пружины 6 выдвигается из корпуса 3, обеспечивая перемещение форсунки 5 по прямой линии вдоль обрабатываемой поверхности. При движении корпуса 3 в обратном направлении трос 7, наматываясь на барабан 8, сжимает пружину 6 и втягивает штангу 4 внутрь корпуса руки.
С целью уменьшения динамики конструкции манипулятор может иметь две качающиеся руки (фиг. 4), движущиеся в противоположных направлениях и приводимые в движение от одного привода качания.
За счет использования одного привода для перемещения двух рук повышается производительность и снижается энергоемкость.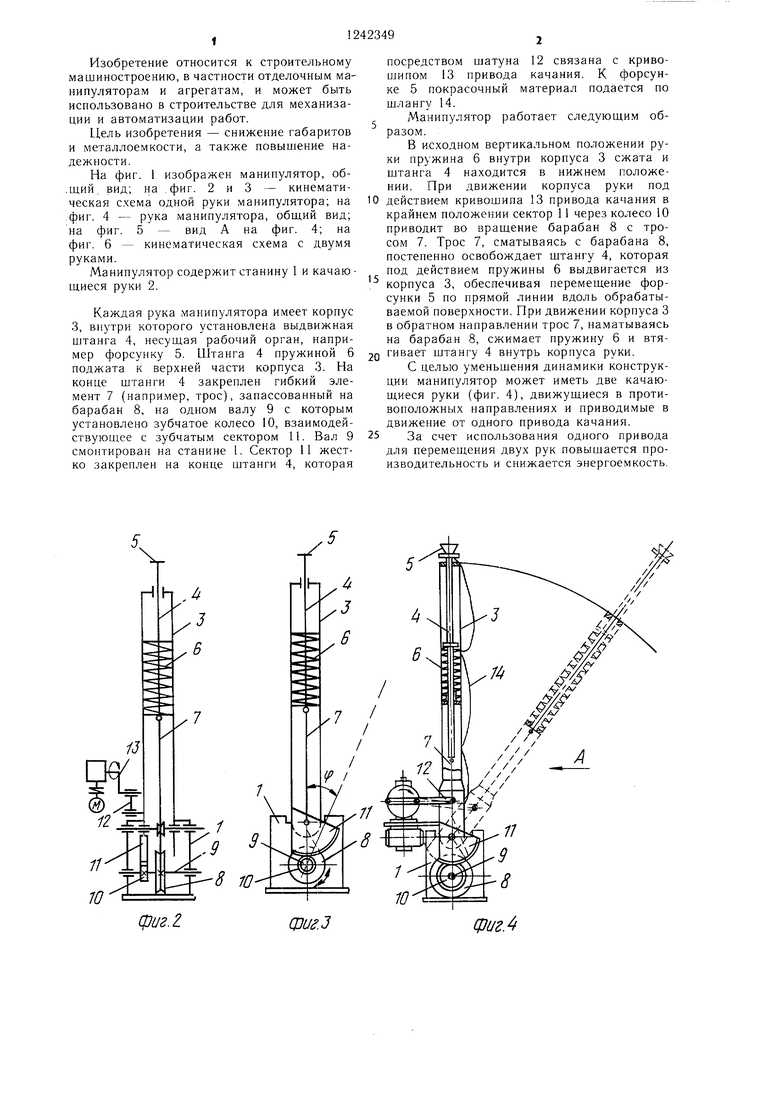
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1521588A1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 1996 |
|
RU2108486C1 |
| Манипулятор | 1985 |
|
SU1281400A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| АВТОМАТИЧЕСКИЙ ПРИВОД МЕХАНИЧЕСКИХ НАРУЧНЫХ ЧАСОВ, МЕХАНИЗМ НАРУЧНЫХ ЧАСОВ С АВТОМАТИЧЕСКИМ ПРИВОДОМ, МЕХАНИЧЕСКИЕ НАРУЧНЫЕ ЧАСЫ С АВТОМАТИЧЕСКИМ ПРИВОДОМ И СПОСОБ АВТОМАТИЧЕСКОГО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МЕХАНИЧЕСКИХ НАРУЧНЫХ ЧАСОВ | 2013 |
|
RU2533339C1 |
| Установка для индукционного нагрева деталей | 1985 |
|
SU1458396A1 |
| "Устройство для шлифования гнутых деталей из древесины "Адзура" | 1990 |
|
SU1776223A3 |
| Станок для обработки оптических деталей | 1981 |
|
SU1028479A1 |

фиг. 2.
фиг.З
фиг А
14
10
5
фиг. 5
| Промышленный робот | 1982 |
|
SU1085803A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
