ff
IS S л 12
10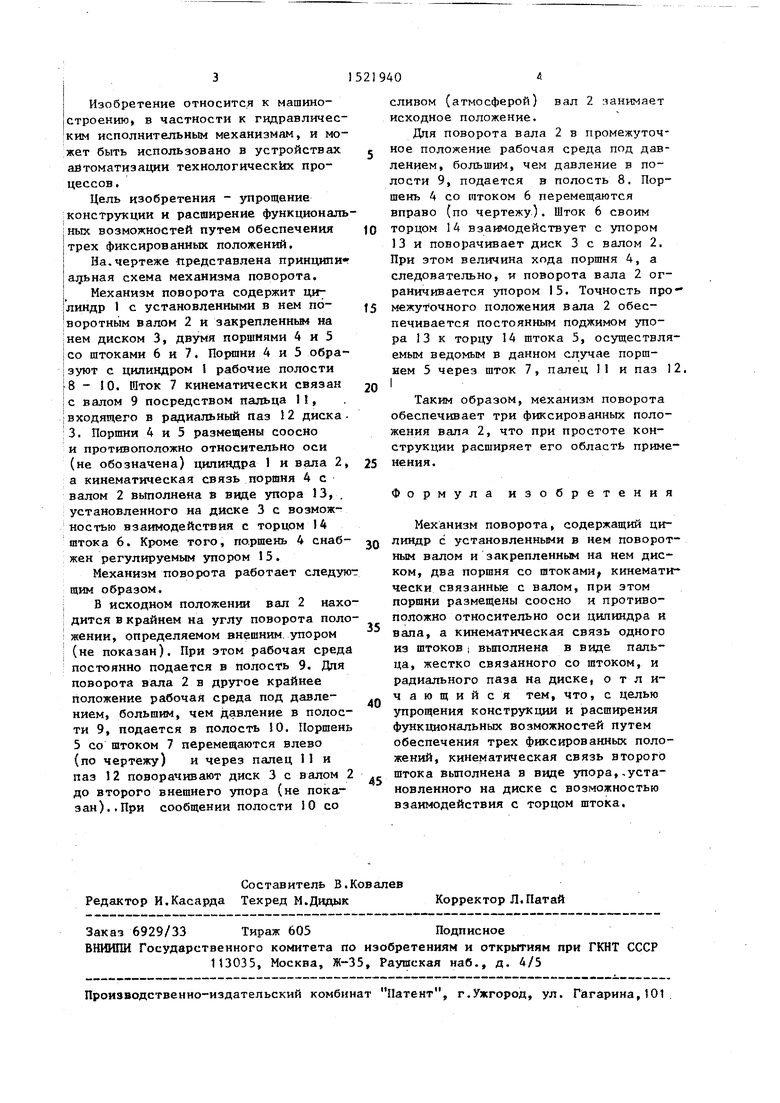
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Реверсивный храповой механизм | 1988 |
|
SU1634887A1 |
| Устройство для клеймения | 1980 |
|
SU897369A1 |
| МАШИНА ДЛЯ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ТАРЫ | 1969 |
|
SU244677A1 |
| Устройство для подачи ящиков с откидными крышками и их закрывания | 1985 |
|
SU1333612A1 |
| Многопозиционная инструментальная головка | 1990 |
|
SU1787696A1 |
| Пневматический двухпозиционный переключатель | 1980 |
|
SU966337A1 |
| МНОГОДИСКОВАЯ ФРИКЦИОННАЯ МУФТА-ТОРМОЗ | 1970 |
|
SU262557A1 |
| Станок для фрезерования непараллельных пазов | 1977 |
|
SU737138A1 |
| Устройство для намотки электрических катушек из полосы на ребре | 1976 |
|
SU608235A2 |
Изобретение предназначено для использования в устройствах автоматизации технологических процессов. Цель изобретения - упрощение конструкции и расширение функциональных возможностей путем обеспечения трех фиксированных положений. Механизм поворота содержит цилиндр 1 с установленными в нем поворотным валом 2, диском 3 и двумя поршнями 4,5 со штоками 6, 7. Поршни 4, 5 образуют с цилиндром 1 рабочие полости 8, 9, 10, при этом полость 9 постоянно связана с источником питания, а в полости 8, 10 поочередно подается рабочая среда под давлением, превышающим уровень давления в полости 9. Шток 7 кинематически связан с валом 2 посредством пальца 11, входящего в радиальный паз 12 диска 3. Кинематическая связь поршня 4 с валом 2 выполнена в виде упора 13, установленного на диске 3 с возможностью взаимодействия с торцом 14 штока 6. Ход поршня 4 ограничен регулируемым упором 15. Подачей и сбросом рабочей среды в полость 10 достигаются два крайних положения вала 2. Промежуточное положение вала 2 обеспечивается подачей рабочей среды в полость 8. Точность промежуточного положения вала 2 определяется постоянным поджимом упора 13 к торцу 14 штока 6, осуществляемым ведомым поршнем 5 через шток 7, палец 11 и паз 12. 1 ил.
Изобретение относится к машиностроению, в частности к гидравличес- |ким исполнительным механизмам, и может быть использовано в устройствах автоматизации технологических процессов .
Цель изобретения - упрощение ;конструкции и расширение функциональ 1ных возможностей путем обеспечения |трех фиксированных положений. I На.чертеже представлена принципи jajjbHaH схема механизма поворота.
Механизм поворота содержит щг- линдр 1 с установленными в нем п6- :воротным валом 2 и закрепленным на |нем диском 3, двумя поршнями 4 и 5 |со штоками 6 и 7. Поршни 4 и 5 обра- i зуют с цилиндром I рабочие полости 8 - 10. Шток 7 кинематически связан |С валом 9 посредством пальца П, i входящего в радиальный паз 2 диска :3, Поршни 4 и 5 размещены соосно и противоположно относительно оси (не обозначена) ципиндра 1 и вала 2, а кинематическая связь поршня 4 с валом 2 вьтолнвна в виде упора 13, . установленного на диске 3 с возможностью взаимодействия с торцом 14 штока 6. Кроме того, по.ршень 4 снабжен регулируемым упором 15.
Механизм поворота работает следую щим образом.
; В исходном положении вал 2 находится в крайнем на углу поворота положении, определяемом внешним упором (не показан). При этом рабочая среда постоянно подается в полость 9. Дпя поворота вала 2 в другое крайнее положение рабочая среда под давлением, большим, чем давление в полости 9, подается в полость 10. Поршень 5 со штоком 7 перемещаются влево (по чертежу) и через палец 1 1 и паз 12 поворачивают диск 3 с валом 2 до второго внешнего упора (не показан).. При сообщении полости 10 со
0
5
0
5
0
5
0
5
сливом (атмосферой) вал 2 занимает исходное положение.
Дпя поворота вала 2 в промежуточное положение рабочая среда под давлением, большим, чем давление в полости 9, подается в полость 8. Поршень 4 со штоком 6 перемещаются вправо (по чертежу). Шток 6 своим торцом 14 взаимодействует с упором 13 и поворачивает диск 3 с валом 2. При этом величина хода поршня 4, а следовательно, и поворота вала 2 ограничивается упором 15. Точность про межуточного положения вала 2 обеспечивается постоянным поджимом упора 1 3 к торцу 14 штока 5, осуществляемым ведомым в данном случае поршнем 5 через шток 7, палец 11 и паз 12, I
Таким образом, механизм поворота обеспечивает три фиксированных положения валя 2, что при простоте конструкции расширяет его область применения.
Формула изобретения
Механизм поворота, содержащий цилиндр с установленньми в нем поворотным валом и закрепленнЕ 1м на нем диском, два поршня со штоками кинематически связанные с валом, при этом поршни размещены соосно и противоположно относительно оси ципиндра и вала, а кинематическая связь одного иэ штоков i выполнена в виде пальца, жестко связанного со штоком, и радиального паза на диске, отличающийся тем, что, с целью упрощения конструкции и расширения функциональных возможностей путем обеспечения трех фиксированных положений, кинематическая связь второго штока вьтолнена в виде упора,,установленного на диске с возможностью взаимодействия с торцом штока.
| Тренажер радиотелеграфиста | 1985 |
|
SU1285515A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
