114
Изобретение относится к весоизмерительной технике.
Цель изобретения - повышение точности.
На фиг. 1 показана структурная схема устройства; на фиг. 2 - вариан выполнения блока управления; на фиг. 3 - вариант выполнения перестраиваемого фильтра; на фиг. 4 - графики, поясняющие работу устройства.
Устройство для взвешивания железнодорожных вагонов в движении содер- жит встроенные в железнодорожный пут 1 весовые модули 2, укрепленные на фундаментных блоках 3 с помощью струнок 4 и опирающиеся на силоизмери- тельные преобразователи 5, Расположение модуля 2 под одним рельсом пути 1 показано в условном разрезе (фиг. 1), второй модуль 2 (не показан) расположен под другим рельсом. Силоизмерительные преобразователи 5 модулей 2 соединены параллельно и через перестраиваемый фильтр 6 подключены к аналого-цифровому преобразователю (АЦП) 7, информационные выходы которого, как и выходы блока 8 управления взвешиванием, скоммути- рованы с шинами 9 микропроцессорного
блока 10 вычисления, в состав которого входит центральный процессор 11, оперативное запоминающее устройство (ОЗУ) 12, постоянное запоминающее
Фильтр 6 (фиг. 3) содержит операционные усилители 29 и 30, включенные по схеме интеграторов с помощью интегрирующих цепочек R1C3, R2C5. Ключ 19, состоящий из полевого транзистора Т и резистора R4, замыкает
устройство (ПЗУ) 13, интерфейс 14 ин- , при срабатывании схемы 18 совпадения
45
дикации и регистрации, выходы которого соединены с терминальным устройством 15. Наезд на модули 2 колеса 16 железнодорожного объекта (вагона или локомотива) воспринимает- 40 ся силоизмерительными преобразователями 5 и компаратором 17, связанным через схему 18 совпадения и ключ 19 с управляющим входом перестраиваемого фильтра 6.
Блок 8 (фиг. 2) содержит, например, путевые датчики 20 и 21, расположенные на одном из рельсов пути 1 на расстоянии 1950 мм по обе стороны от весовых модулей 2, схемы И 22, триггеры 23 направления, коммутатор 24, инвертор 25, регистры подъезда 26 и въезда 27 тележки (объемом в две единицы каждый) и триггер 28 Вагон (В).
На выходе триггеров 23 направления после начала взвешивания формируется сигнал направления движения (Н1 и Н2, левое и правое) в зависи50
55
емкость С4 на землю, так что дополнительно включается в работу фильтрующая цепочка из резисторов R1, R3 и емкости С4.Частота среза фильтра 6 при выключенном ключе 19 100 Гц, а при включенном на порядок ниже.
Устройство для взвешивания железнодорожных вагонов в движении работает следующим образом.
При наезде в момент t колеса 16 на весовые модули 2 выходной сигнал, силоизмерительных преобразователей 5 резко возрастает и имеет вид импульсов (фиг. 4) продолжительностью до 0,4 с и менее.
Плоские плато импульсов А - В характерны вследствие колебаний кузовов вагонов на рессорах наличием сильных низкочастотных помех (частотой 3-7 Гц, конкретной для данного вагона), модулированных колебаниями меньшей амплитуды, но большей частоты (40 Гц, летом меньше, зимой выше)
0
$
0
5
0
мости от взаимного расположения путевых датчиков 20 и 21. С верхнего коммутатора 24 снимается сигнал (фиг. 2, Д1) того путевого датчика 20 и 21, который срабатывает первым по ходу движения состава.
Сигнал датчика Д1 используется для формирования признаков .Тележка подъехала (ТП) и Тележка въехала (ТВ). Признак ТП означает, что первая ось тележки вагона подъехала к весовым модулям 2 на расстояние 100 - 150 мм. Признак ТВ означает, что последняя ось тележки вагона (сколько бы осей не имела тележка - две, три или четыре) въехала на весовые модули 2.
Формируемый триггером 28 признак В означает, что взвешивается вагон (а не локомотив или иной подвижный объект, не обладающий идентификационными признаками - межосевыми расстояниями в тележке до 1800 - 1850 мм). За время взвешивания любого вагона признак В появляется дважды (при взвешивании первой и второй тележки).
Фильтр 6 (фиг. 3) содержит операционные усилители 29 и 30, включенные по схеме интеграторов с помощью интегрирующих цепочек R1C3, R2C5. Ключ 19, состоящий из полевого транзистора Т и резистора R4, замыкает
5
0
0
5
емкость С4 на землю, так что дополнительно включается в работу фильтрующая цепочка из резисторов R1, R3 и емкости С4.Частота среза фильтра 6 при выключенном ключе 19 100 Гц, а при включенном на порядок ниже.
Устройство для взвешивания железнодорожных вагонов в движении работает следующим образом.
При наезде в момент t колеса 16 на весовые модули 2 выходной сигнал, силоизмерительных преобразователей 5 резко возрастает и имеет вид импульсов (фиг. 4) продолжительностью до 0,4 с и менее.
Плоские плато импульсов А - В характерны вследствие колебаний кузовов вагонов на рессорах наличием сильных низкочастотных помех (частотой 3-7 Гц, конкретной для данного вагона), модулированных колебаниями меньшей амплитуды, но большей частоты (40 Гц, летом меньше, зимой выше)
, и,., так как практически должен
вызванных колебаниями колесных пар, балласта и рельсов. Кроме того, низ кочастотные колебания модулированы нестационарными помехами, вызванными неровностями пути или торможениями и часто имеющими вид выбросов (мо мент времени ti, фиг. 4в).
На фиг, 4 показаны импульсы, соответствующие наезду колеса 16 порож него вагона (а) и груженного вагона (б) .
Выбрав соответствующий уровень У компарации компаратора 17 и переключая фильтр 6 на узкую полосу по достижении этого уровня (фиг. 4а), . можно добиться небольшой потери времени обработки. Однако при установке на компараторе 17 уровня У (фиг.4а и б), соответствующего порожнему вагону, (например, равного половине осевого усилия - 2,5 тс - для порожних вагонов), переходный процесс для груженого вагона, заканчивающийся в момент времени t4 (фиг. 4б), значи тельно сокращает интервал обработки b,- t длиться Зс/.
Предлагаемое устройством решение состоит в том, что переключение фильтра 6 на узкую полосу происходит в точке А, т.е. на вершине импульса наезда.
Таким образом, все время до t 4 и от t до времени, соответствующего точке А плато, ключ 19, состоящий из резистора R4 и полевого транзистора Т, разомкнут и операционные усилители 29 и 30 работают как интеграторы с постоянным времени, определяемым цепочками R1C3 и R2C5 соответственно, что обеспечивает фильтру 6 частоту среза 100 Гц (в зависимости от конкретных условий и соответственной настройки).
Для осуществления переключения АЦП 7 с большой частотой (10 кГц) производит измерение сигнала преобразователей 5, а блок 10 вычисления по программе, записанной в ПЗУ 13, вычисляет скорость изменения сигнала, например, путем определения текущей разности предыдущих и последующих замеров.
Поскольку преобразователи 5 практически безинерционны и наезд происходит скачком, то скорость изменения сигнала преобразователей 5 на участке О - А (фиг. 4в) на два по10
15
20
25
30
35
40
45
50
55
рядка отличается от средней скорости изменения сигнала на плато А - В. При выходе сигнала в точку А блок 10 фоомирует сигнал Переключение (П) и, поскольку сигнал У компаратора 17 сформирован ранее, включается схема 18 совпадения, ключ 1.9 и фильтр 6 переходят на узкую полосу. При этом (фиг. 3) транзистор Т замыкается, включается в работу резистивно-ем- костной фильтр с постоянной времени (R1+R3)C4, что обеспечивает частоту среза фильтра 6 10 Гц (в зависимости от условий работы настройки).
Условием снятия сигнала П является выезд колеса 16 с модулей 2, так что фильтр 6 остается включенным на узкую полосу в течение всего времени существования импульса наезда (фиг. 4в). Только в момент времени t-, когда сигнал на входе фильтра 6 становится меньше уровня У, компаратор 17 изменяет состояние одного из входов схемы 18 совпадения и ключ 19 переключает фильтр 6 на широкую полосу.
Примерный вид импульса на выходе фильтра 6 изображен на фиг. 4г. В результате сужения полосы пропускания в выходном импульсе (фиг. 4г) оказываются отфильтрованными составляющие колебаний необрессоренных масс вагона (частотой 40 Гц) и подавлены нестационарные выбросы сигнала (в момент tz). Дальнейшая обработка этого сигнала (фиг. 4г) производится в цифровой форме блоком 10 вычисления, например, следующим образом.
Эквидистантные дискретизации AJ выходного сигнала фильтра 6, вырабатываемые АЦП 7, загружаются процессором 11 в ОЗУ 12. По программе, записанной в ПЗУ 13, процессор 11 производит перебор дискретизаций, определяет экстремальные значения Э; (фиг, 4г) и производит цифровое интегрирование сигнала на участках Э1 - Э2, Э2 - 33 и т.д. Интегральное значение сигнала на каждом таком участке является само по себе результатом.
Полученные интегралы по всем (п-1) участкам (фиг. 4г) могут быть, например, просуммированы, чем реализуется определение интеграла за целое число периодов помехи (в данном случае полупериодов, так как измерение производится не вслепую, а с дополнительным знанием фазы - экстремума - помехи). Кроме того, полученные интегралы могут быть подвергнуты робастной обработке, простейшим случаем которой является удаление из интегральной суммы выбросов, т.е. результатов, сильно отли
чающихся от среднего.
В результате аналоговой обработки сигнала преобразователей 5, последующей дискретизации АЦП 7 и цифровой обработки блоком 10 масса каждой оси объекта М; вычисляется и запоминается в ОЗУ 12.
Блок 8 управления взвешиванием |(фиг. 2) работает следующим образом. I При наезде первого колеса 15 пер- Uoro объекта в составе на путевой , датчик 20 (или 21) срабатывает один из триггеров 23 направления, вырабатывающих сигнал направления движе- ния Н1 (или Н2), сохраняющийся на все время взвешивания данного состав и отменяемый сигналом Сброс (С), подаваемым вручную или автоматически известными способами. Вследствие срабатывания одного из триггеров 23 (другой при этом блокируется) с верхней схемы коммутатора 24 снимаются сигналы Д1, соответствующие срабатыванию того путевого датчика 20 (21), который сработал первым.
Поскольку путевые датчики 20 (21) формирующие сигналы Д1, расположены от весовых модулей 2 на расстояни 1950 мм, а типовое межосевое расстояние тележек большинства подвижных объектов составляет 1800 - 1850 мм, то при подъезде тележки к весовому модулю 2 соответствующий путевой датчик 20 (21) срабатывает 2 раза, прежде чем колесо 16 наезжает на модули 2.
Выход регистра 26 (объемом две единицы), подсчитывающего сигналы Д1, выдает признак ТП и возбуждает триггер 28 признака В.
Межосевое расстояние локомотивов составляет 2100 - 2200 мм, так что признак ТП формируется только при подъезде вагона, но не локомотивов.
Аналогичным образом регистром 27 (объемом также в две единицы) путем подсчета количества импульсов У компаратора 17 формируется признак ТВ означающий , что на модули 2 вы0
5
0
5
ехало последнее колесо 16 взвешиваемой тележки.
Триггер 28 признака В устанавливается признаком ТВ в исходное положение.
Таким образом, за время взвешивания каждого вагона признак В появляется дважды, после взвешивания соответственно первой и второй тележек.
Процессор 11 контролирует по программе, записанной в ПЗУ 13, четность признака В и на каждом втором признаке В выдает команду на суммирование всех масс осей, обработанных и запомненных в ОЗУ 12 за время существования первого и второго признаков В.
Результат, т.е. масса четырех-, шести- или восьмиосного вагона через интерфейс 14 индикации и регистрации передается в терминальное устройство 15 для отображения на табло и печати.
Таким же образом взвешиваются и регистрируются все остальные объекты. При этом не имеет значения и не нарушает алгоритма работы осность взвешенных объектов, их взаимное рас- 0 положение, наличие в составе в любом порядке и количестве локомотивов и иных нерегистрируемых объектов.
По окончании взвешивания вручную или автоматически, например путем подсчета количества импульсов Д2 ( (фчг. 2) после взвешивания последнего объекта, подается команда С, приводящая устройство в состояние готовности к взвешиванию очередного состава.
5
0
Формула изобретения
Устройство для взвешивания желез- подорожных вагонов в движении, содержащее весовые модули с силоизме- рительными преобразователями, соединенными через фильтр с входом аналого-цифрового преобразователя, выход которого подключен к одному входу блока вычисления, к другому входу которого подключен выход блока управления, а к одному выходу - терминальный блок, отличающееся тем, что, с целью повышения точности, в него введены компаратор, схема совпадения и ключ, а фильтр выполнен перестраиваемым, причем вход компаратора подключен к выходу си
лоизмерительных преобразователей, а выход компаратора соединен с входом блока управления и одним входом схемы совпадения, другой вход которой
соединен с другим выходом блока вычисления, а выход схемы совпадения через ключ соединен с управляющим входом фильтра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для потележечного взвешивания вагонов в движении | 1982 |
|
SU1027530A1 |
| Способ поосного взвешивания железнодорожных вагонов в движении | 1989 |
|
SU1749719A1 |
| Устройство для потележечного взвешивания железнодорожного подвижного состава | 1985 |
|
SU1285324A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1983 |
|
SU1078256A1 |
| Устройство для взвешивания движущихся железнодорожных составов | 1982 |
|
SU1089427A1 |
| Устройство для взвешивания железнодорожного подвижного состава | 1984 |
|
SU1234728A1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| Устройство для динамического взвешивания | 1983 |
|
SU1137330A1 |


Изобретение относится к весоизмерительной технике. Динамическое усилие от вагонов воспринимается весовыми модулями 2, встроенными в ж.д. путь 1. Весовые модули 2 имеют силоизмерительные преобразователи 5, аналоговый сигнал с которых через фильтр 6 поступает на аналого-цифровой преобразователь 7, преобразуется в цифровое значение и затем обрабатывается в микропроцессорном вычислительном блоке 10. Для повышения точности устройства за счет подавления низкочастотных колебаний необрессоренных частей вагонов фильтр 6 выполнен перестраиваемым, а управляющий сигнал на него поступает от компаратора 17 через схему совпадения 18 и ключ 19, при этом вход компаратора подключен к выходу силоизмерительных преобразователей 5. 4 ил.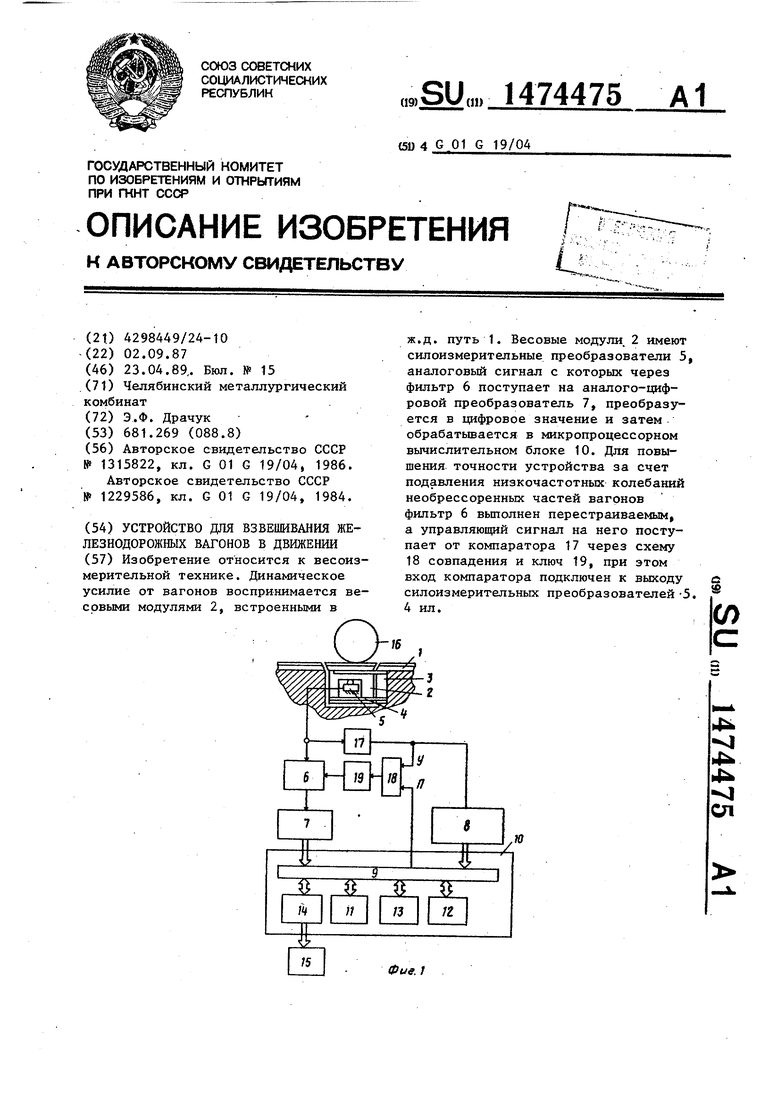
#1 фие-3
HSf f В
Фие.2
tjtzЈ3 ty
tlt3
ФигМ
л-в
| Устройство для поосного взвешивания подвижного состава | 1986 |
|
SU1315822A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для поосного взвешивания железнодорожного состава в движении | 1984 |
|
SU1229586A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
