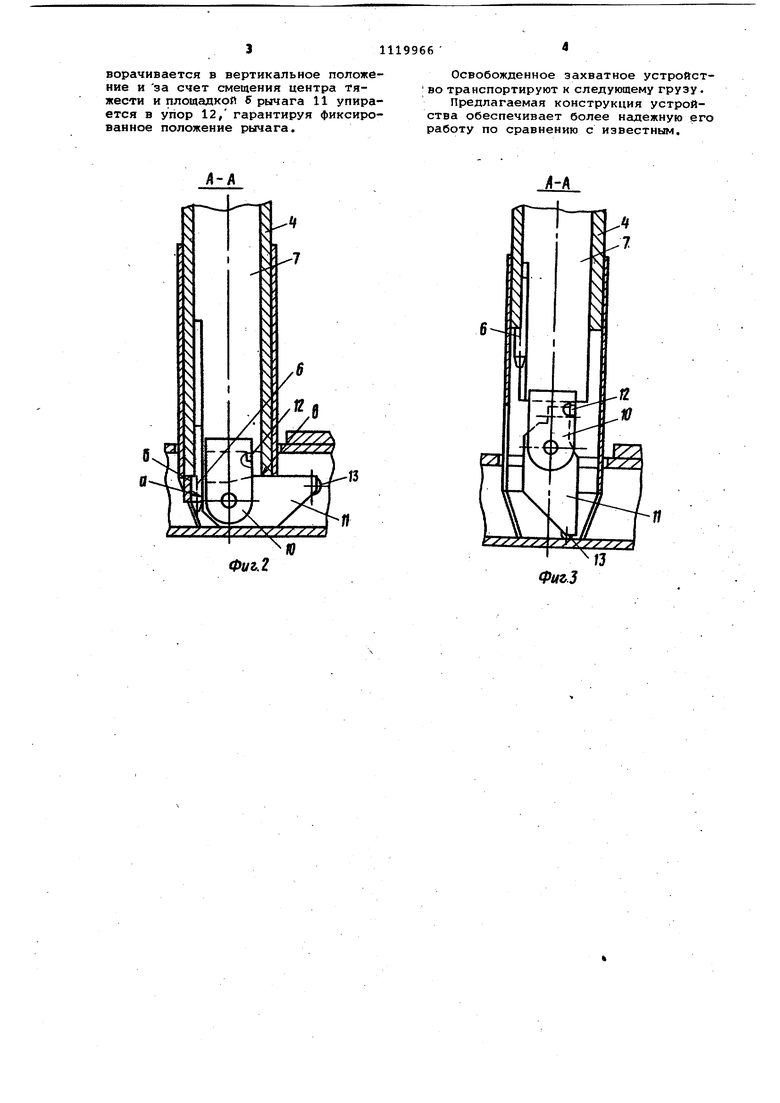
Изобретение относится к подъемно транспортному оборудованию, а именно к захватным устройствам для грузов с вертикальными отверстиями. Известно захватное устройство дл грузов с отверстиями, содержащее захватные органн, включающие в себя направляющие втулки, подвижно установленные в них стойки, неуравновешенные поворотные двуплечие рычаги и ролики , и навешиваемую на грузоподъемную машину траверсу, кинематически связанную с рамой с помощью механизма фиксации двуплечих рычагов Г1 . Недостатком указанного захвата я ляется возможность самопроизвольног захвата изделия при наличии сил ине ции Е опорном рычаге при снятии захвата с изделия. Цель изобретения - повьпнение надежности работы. Поставленная цель достигается тем,что в захватном устройстве для грузов с отверстиями, содержащем за хватные органы, включающие в себя направляющие втулки, подвижно установленные в них стойки, неуравновешенные поворотные двуплечие рычаги и ролики, и навешиваемую на грузоподъемную машину траверсу, кинемати чески связанную с рамой с помощью м ханизма фиксации двуплечих рычагов, направляющие втулки прикреплены к раме и снабжены стержнем; а стойки прикреплены к траверсе и на них с помощью проушин закреплены двуплечие рычаги, выполненные с отверстие в одном плече для захода стержня, при этом каждый ролик закреплен на другом плече двуплечего рычага с возможность.ю взаимодействия с горизонтальной поверхностью груза. На фиг.1 изображено захватное ус ройство, общий вид; на фиг.2 - сече ние А-А на фиг.1 положение захватного органа перед захватом и транспортировкой изделия); на фиг.З - се чение А-А на фиг.1. (положение захватного органа в момент снятия захвата с изделия); на фиг.4 - узел 1 на фиг.1 (механизм фиксации в закры том положении); на фиг.З - узел 1 .н фиг.1 (механизм фиксации в открытом положении). Захватное устройство содержит на вешиваемую на крюк грузоподъемного механизма траверсу 1, соединенную с Рс1мой 2 механизмом 3 фиксации. К раме 2 прикреплены направляющи втулки 4, связанные между собой перемычками 5. Нижней части втулок 4 жестко смонтированы стержни 6. Захватные органы включают в себя стой ки 7, расположенные во втулках 4 и соедийенные между собой попарно гру зовыми балками 8, которые снабжены полами направляющими 9. В нижней части стоек 7 на проушинах 10 шарнирно смонтированы неуравновешенные двуплечие рычаги 11 и размещены упоры 12. Двуплечий рычаг 11 на одном плече имеет отверстие « , а на другом плече эксцентрично оси поворота установлен ролик 13. Траверса 1 выполнена со штангами 14, расположенными в полых направляклцих 9 грузовой балки 8. Штанги 14 снабжены наконечниками 15. В центре траверсы 1 размещена направляющая 16 для механизма 3 фиксации. Механизм 3 фиксации содержит смонтированную на траверсе 1 направляющую 16, на которой жестко закреплены пальцы 17 и 18 и установлен поворотный стержень 19, снабженный штырем 20, взаимодействующим с пазом 21 проушин 22, жестко смонтированных на раме 2. В средней части стержень 19 имеет голо- ку 23 с фасонными торцовыми зубьями 24 и 25, которые смещены один относительно другого на 45. Захватное устройство работает следукяцим образом. К месту застропки груза устройство транспортируют с вертикальным поло.жением двуплечего рычага 11, который площадкой 5 опирается на упор 12, а механизм 3 фиксации находится в закрытом положении. При опускании захватных органов в отверстия груза двуплечие рычаги при помощи роликов 13 поворачивёцотся в горизонтальное положение и останавливают стойки 7. Рама 2 захвата продолжает двигаться вниз и своими стержнями 6 попадает в отверстия 01 рычагов 11, блокируя их со стойками 7, после чего втулки 4 упираются в верхнюю поверхность в рычагов 11, и рама останавливается,а траверса 1 продолжает двигаться до . тех пор, пока пальцы 17, взаимодействуя с зубьями 24 головки 23, не повернут стержень 19 на 45. При подъеме траверсы 1 вверх пальцы 18 взаимодействуют с зубьями 25 головки 23, поворачивают стержень 19 еще на 45, выводя штырь 20 из зацепления с лазом 21 проушин 22 рамы 2 и последняя остается на месте, а траверса, двигаясь вверх, наконечниками 15 штанг 14 захватывает грузовые балки 8 стоек 7 и вместе с ними изделие, которое транспортируется к месту назначения. После установки изделия и опускания траверсы 1 срабатывает механизм 3 фиксации в описанном вьоае порядке и производит блокировку рамы 2 с траверсой 1 за счет сцепления штыря 20 с пазом 21 проушины 22, что приводит к освобождению отверстия а рычага 11 от стержня 6, а рычаг 11 поворачивается в вертикальное положение и за счет смещения центра Тяжести и площадкой 6 рычага 11 упирается в упор 12, гарантируя фиксированное положение рычага.
Освобожденное захватное устройст во транспортируют к следующему грузу.
Предлагаемая конструкция устройства обеспечивает более надежную его работу по сравнению с известным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для груза с проушиной | 1989 |
|
SU1735194A1 |
| УСТРОЙСТВО для ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ | 1968 |
|
SU220456A1 |
| Захват для изделий с центральным отверстием | 1986 |
|
SU1409572A1 |
| Захват-кантователь | 1983 |
|
SU1137056A1 |
| Грузозахватная система | 1985 |
|
SU1414753A1 |
| Захватное устройство для барабанов с отверстием | 1981 |
|
SU1024406A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для контейнеров | 1988 |
|
SU1705226A1 |
| Захват для грузов с отбортовкой | 1990 |
|
SU1766820A1 |

ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ jГРУЗОВ С ОТВЕРСТИЯМИ, содержащее захватные органы, включающие в себя направляющие вТулки, подвижно установленные в них стойки, неуравновешенные поворотные двуплечие рычаги и ролит ни, и навешиваемую на грузоподъемную машину траверсу, кинематически связанную с рамой с помордью механизма фиксации двуплечих рычагов, отличающееся тем, что, с целью повышения надежности работы, направляюгаие втулки прикреплены к раме и снабжены стержнем, а стойки прикреплены к траверсе и на них с помощью проушин закреплены двуплечие рычаги, выполненные с отверстием в одном плече для захода стержня, при этом каждый ролик закреплен на другом плече двуплечего рычага с возможностью взаимодействия с горизонтальной поверхностью груза.
Л-А
0ut.2
И
ФиъЗ
i
/
/ /
14
18
r -
-Ф
NJ
19
-гг
-21
:
Фиг.
Фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
