(Л
СЛ N3 СП
О 4 СП
Изобретение относится к транспортному машиностроению, а конкретно к устройст- нам для бесчокерной трелевки леса.
Цель изобретения - новышение иро- и июдип-льности.
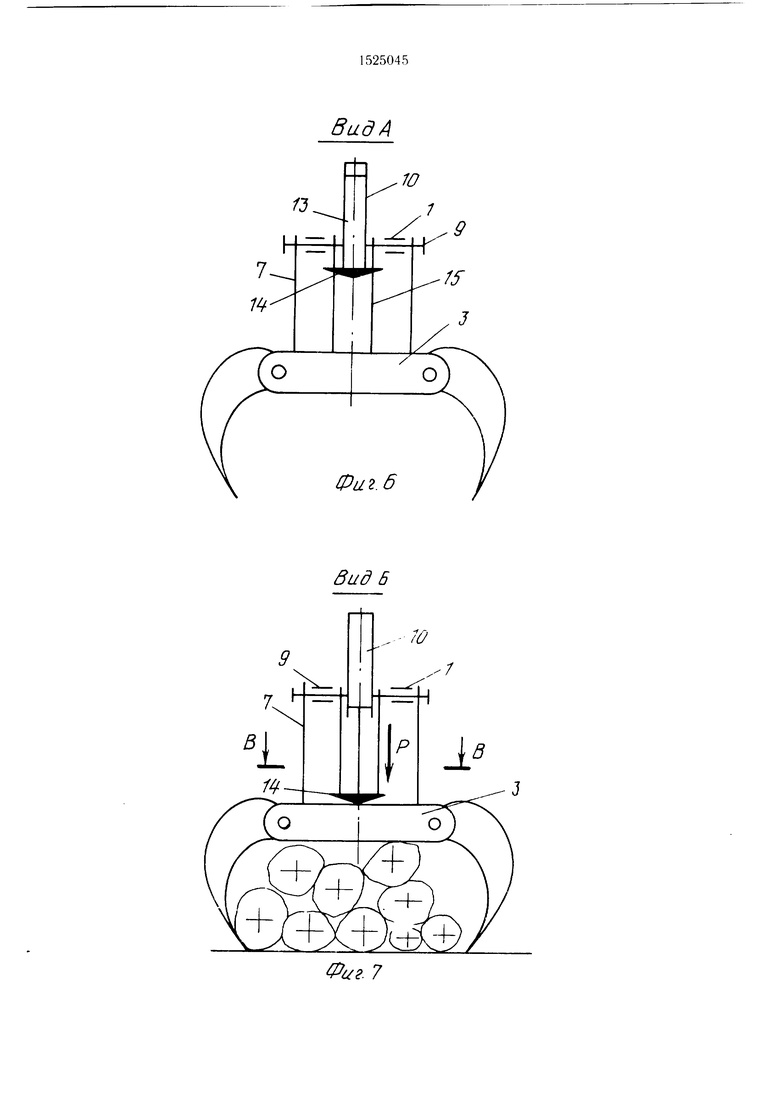
На фи1 1 ноказано устройство для песчокерной трелевки леса при подъезде к пачке деревьев, вид сбоку; на фиг. 2 - уст- poiicTBo при подборе пачки деревьев; на фиг. Лустройство, когда пачка дереHhi ii поднята; на фиг. 4 - устройство, когда пачка деревьев нодве1пена на ролике а|)ки; на фиг. о - устройство, вид сверху; на (|)иг. 6вид А на фиг. 1; на
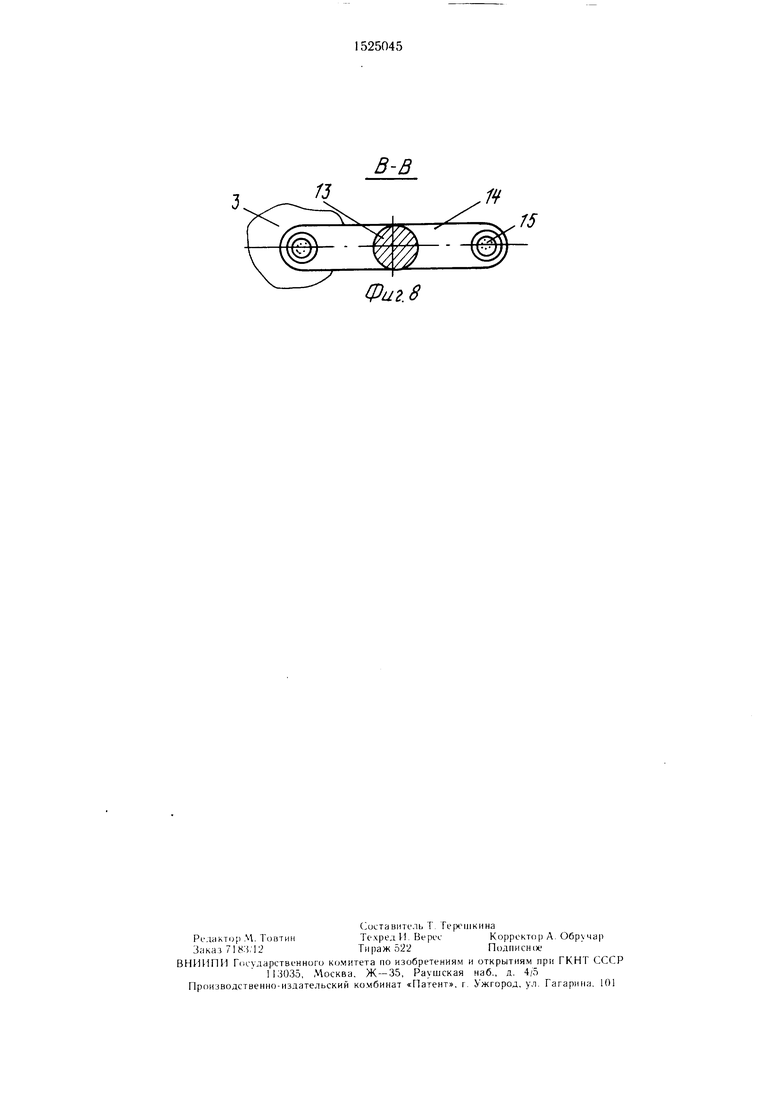
фп1. 7 вид Б на фиг. 2; на фиг. 8 - ра ;рсз Б В на фиг. 7.
N cipoiicriio содержит арку 1 с гидроци- .11пд|) 2 привода шшорота ее в верти- .bsi()ii продольной н.,юскости, за.хват 3, i u.iHK 4 арки 1, канат 5, закрепленные на раме самоходного шасси 6. Захват 3 иод- Ш ПК Н к I с помощью основной гиб- 1ч1)|| снязи 7, нап|1имер, канатов, которые раз- | лчч пы в поперечной плоскости и симмет- рич.К расио.южепы относительно оси подвески (ахвага 3. Канат 5 запасован па бара- I MHC .к бедки 8, nponyniCH по ролику 4 и t.iKpfii.ieii па захвате 3. На арке 1 с по- ммпп.и) цап()) 9 горизонтального осевого iMip.i па11()влен допо, 1пите;1ьный гидроци- Miiri) iO с иозможностью поворота в нродоль- ;ii.(, pi 1;ка.11)П011 плоскости, подпружинен- ||ьг,1 11р жипо11 11. Один копсп иружины 11 чоедпнеп с ко|)пусом дополните:1ьпого 1Ч1дро- мп.1ипд)а 10, а через дополнитель- ПЫ11 канал 12 с канатом 5 лебедки 8. lllioK 13 дополни гельного гидропилипд|)а 11) снабжен упором 14 с двумя отверстиями, RMHM которые нропушены дополните: ь- пыс гибкие связи 15, соединенными конца- л с цапфами горизонтального осевого шарнира п с захватом 3. Дополнительные гибкие связи 15 соеди} яют захват 3 с аркой 1 и разиесепь в поперечной плоскости и рас- по.южены симмегрично относительно оси подвески захвага 3. Доно.чнительные гибкие связи 15 намного гоньн.е основных гибких ч иязен 7, поутому осиовная сила от массы laxnara 3 и пачки деревьев передается нерез ocHOBHiiie гибкие связи 7, повышая акпм образом надежность в работе допол- liHKMbHoro гидропилиндра И). Дополпитель- г:ая гибкая связь 15 предназначена для на- :равл1 ния допо.лнительного гидропилиндра 10 па захват 3. Унор 14 выполнен пи- .1пид 1ическ(И1 формы, его продольная ось )ас- П(1, ожена is плоскости поворота челюстс й (ахиата 3.
cT)oiicTBo работает следующим образом.
И граисиоргиом по.южении канат 5 на- и захваг 3 висит на ролике 4, а оснонпая и дополнительная гибкие связи 7 : 15 п«)|-пугы дуюй. lUTOK 13 и упор 14
находятся в верхнем положении, а пружина 11 посредством дополнительного каната 12 натянулась и повернула дополнительный гидроцилиндр 10 вперед до упора в арку
1. Самоходное шасси 6 подъезжает к пачке деревьев в направлении Г. Барабан лебедки 8 устанавливают в положение самопроизвольного разматывания каната 5 (фиг. 1). Захват 3 нод действием своей массы опускается, натягивает основную и до полнительную гибкие связи 7 и 15 и поворачивает дополнительный гидроцилиндр 10 в направлении И в вертикальное положение. Открывают челюсти захвата 3 и, опуская арку 1, опускают открытый захват 3
5 на пачку деревьев. Одновременно выдвиг-а- ют niTOK 13 с унором 14 из дополнительного гидропилиндра 10. Скользя по натя}1у- тым дополнительным гибким связям 15, упор 14 точно попадает в захват 3 (фиг. 8) и арка 1 через пток 13 давит
0 сверху вниз на захват 3 с силой Р (фиг . 2). Захват 3 принудительно врезается в грунт, клеши рас1кхпагают ниже пачки деревьев, затем клепги сжимаются и захватывают всю пачку. IIJTOK 13 с унором 14 втягивают
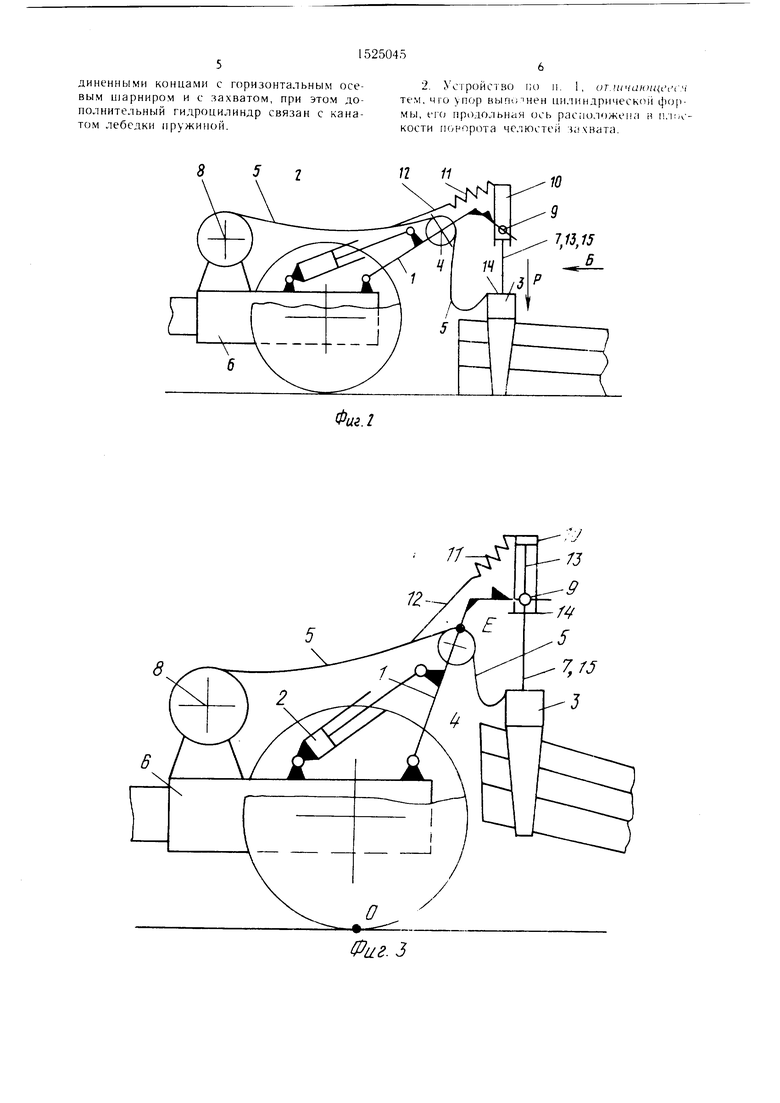
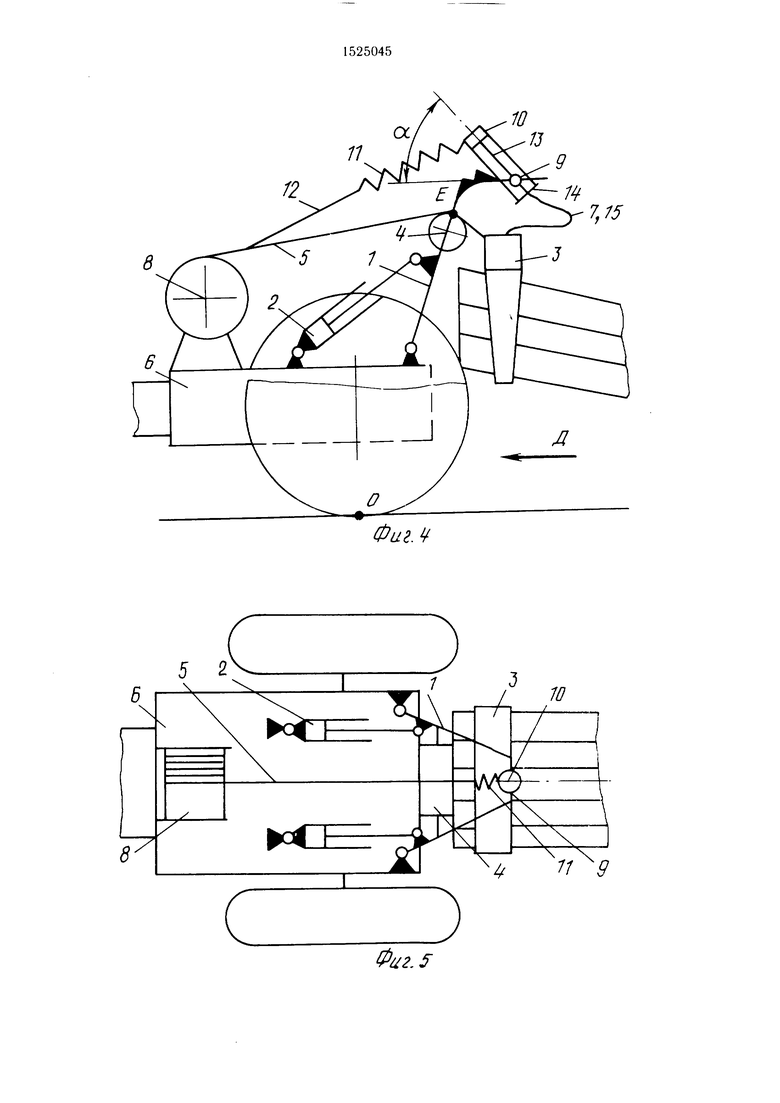
5 в дополнител1)НЫЙ 1 идроцилиндр 10 и аркой 1 поднимают захват (фиг. 3). При этом пачка деревьев висит па цапфах 9 осевого niapiinpa. Л.ебедкой 8 натягивают канаты 5 и 12 и пачка деревьев повисает на ролике 4 в точке Е, а основная п доп(хч0 нительпая ибкие связи 7 и 15 ослабляются и дугообразно изгибакися (4 иг. 4). Пружина 11 сжимаегся и поворачивает на цапфах 9 дополнительны гидроци.1нд) 10 в паирав. Ж на (),:i а (45), ри- жимая ) к I. Устройство из леса
5 движегся в на равлен 1 1 Д па верхний склад. Г1оров ЯВ 1 К Ь СО нтабелем леса захват i5 открьцза от. начка деревьев ; ада1М в пгг-ь бель леса, захват 3 закрывают i усгройст- во движется в .есосеку за следу(.мцей ач- кой леса.
0
(1 орму.2а II:()( ретен1 ч
1. Устройство . 1,. бесч()ке)но трелевки леса, содержа1 1ее самоход ое шасси, шаркир- но закре ленную ia его ра.ме с возмож 1ОСТЬЮ Г ОВОрОТа в ВерТ каЛЬНОЙ р(.. плоскости арку, закрепленный на арке посредством гибких связей захват. г 1дроци- привода 1 оворота а)кп и ;;ебедку с капатом, кои))ый за1 асова 1 через ролик, закренленнь Й ia арке i соеди 1е 1 с захватом, огличиющеесн тем, что, с целью 1овы- производительное , оно снабжено дополните; ьн1..М идро и.индром, которого нрикре1 ле1 горизонтальным осевым 1 арпиро.м к арке, закре 1ленным па птоке. до 1олнительного гидроцилиндра уноро.м для вза 1модействия с захватом и донолнитель- 1ыми г 1бкими связями, пронущенными через .1) в уноре отверстия и сое
диненными концами с горизонтальным осевым шарниром и с захватом, при этом дополнительный гидроцилиндр связан с канатом лебедки пружиной.
2. Устройство ПС) п. 1, oT.ui4aKni((. i CH тем, чго упор вып .;тнен цилиндрической формы, ег(; продольная ось расположена в n,-i:ic- кости п(ророта челюсте;) з; хвата.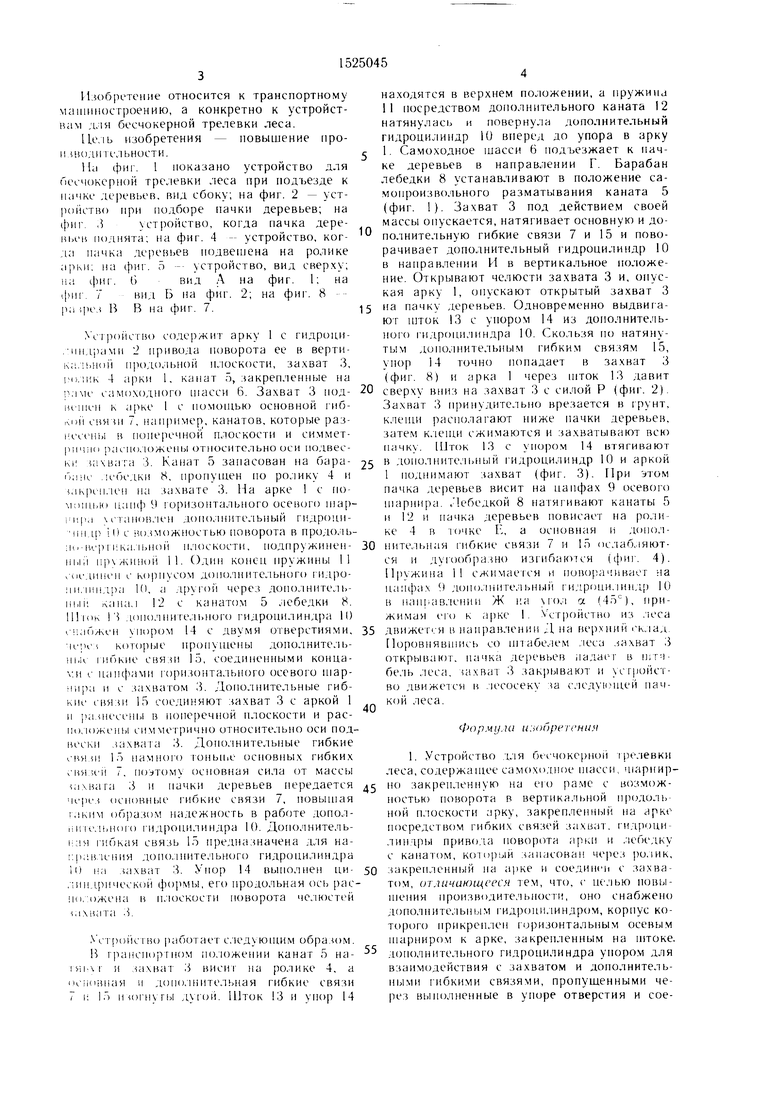
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для трелевки деревьев | 1982 |
|
SU1082649A1 |
| Устройство для бесчокерной трелевки леса | 1986 |
|
SU1359176A1 |
| Устройство для бесчокерной трелевки деревьев | 1987 |
|
SU1428624A1 |
| Устройство для бесчокерной трелевки деревьев | 1986 |
|
SU1388340A1 |
| Грузоподъемное устройство трелевочного трактора | 1980 |
|
SU1047749A1 |
| Транспортное средство для трелевки древесины | 1988 |
|
SU1528676A1 |
| Устройство для трелевки деревьев | 1981 |
|
SU983028A1 |
| Трелевочное оборудование | 1980 |
|
SU905132A1 |
| Машина для бесчокерной трелевки деревьев в полуподвешенном состоянии | 1981 |
|
SU948713A1 |
| Навесное оборудование для бесчокерной трелевки леса | 1980 |
|
SU1036676A1 |
Изобретение относится к транспортному машиностроению. Цель изобретения - повышение производительности. Устройство содержит арку 1, шарнирно закрепленную на раме самоходного шасси 6. На арке 1 закреплен основными и дополнительными гибкими связями 7 и 15 захват 3. Арка 1 связана с гидроцилиндрами 2 ее поворота. На раме шасси 6 закреплена лебедка 8 с канатом 5. Канат 5 пропущен через ролик 4, закрепленный на арке 1, и соединен с захватом 3. Захват 3 соединен с дополнительным гидроцилиндром 10, закрепленным при помощи цапф 9 горизонтального осевого шарнира на арке 1. Гидроцилиндр 10 соединен с пружиной 11 через канат 12 с канатом 5. На штоке 13 гидроцилиндра 10 закреплен упор 14 с отверстиями, в которые пропущены связи 15, соединеные с цапфами 9. Упор 14 выполнен цилиндрической формы и его продольная ось размещена в плоскости челюстей захвата 3. 1 з.п. ф-лы, 8 ил.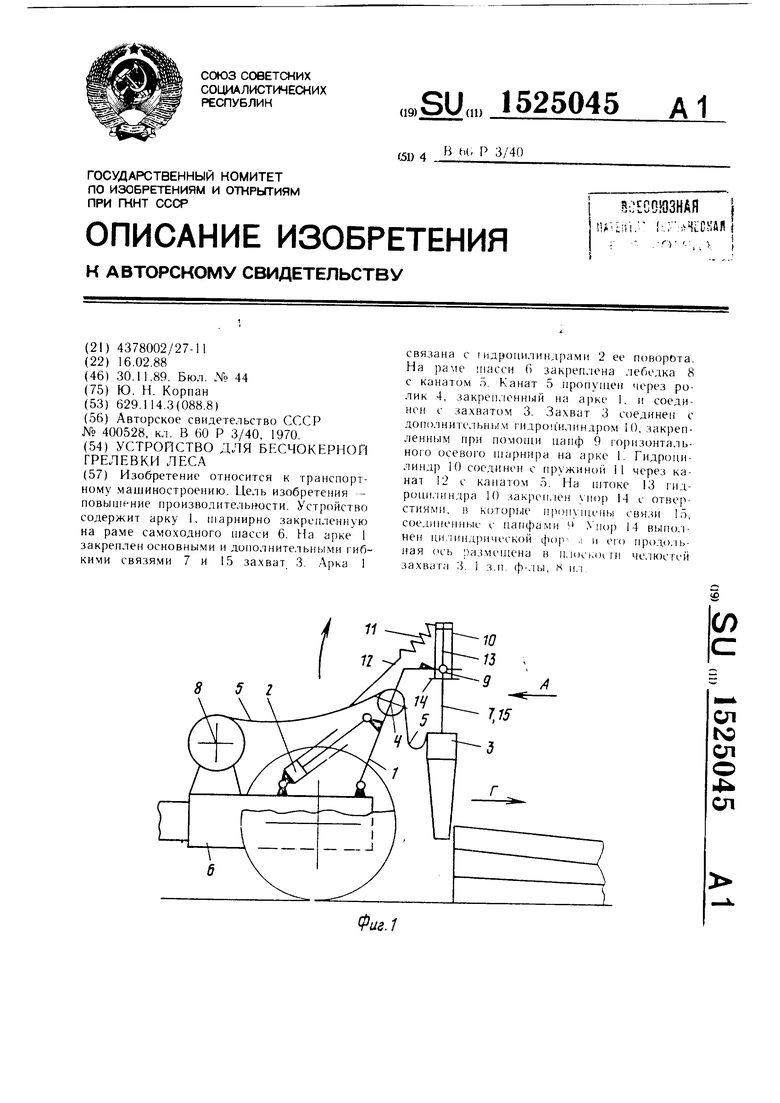
П 11
. J
12
10
/J
1
7,75
Фаг.
11 ff
.5В ад А
1
вид Б
Фиг 7
Фи2.8
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИ ЛЕСА | 0 |
|
SU400528A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
