/4

| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1967 |
|
SU195761A1 |
| А. В. Фролов, В. П. Брюханов, И П. Матвеев, К- Г. Федосеев, В. П. Старков, Г. И. Ходаковский, И. Ф. Герасин, Ю. К. Сысоев, А. И. Евсиков и В. М. ВласовЗая.витель Центральный научно-исследовательский и проектно-конструкторский институт механизации и энергетики лесной промышленности | 1967 |
|
SU201822A1 |
| Машина для бесчокерной трелевки леса | 1986 |
|
SU1399194A1 |
| Машина для бесчокерной трелевки леса | 1984 |
|
SU1229090A2 |
| МАШИНА ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 2004 |
|
RU2285388C2 |
| Устройство для захвата и трелевки деревьев | 1987 |
|
SU1404386A1 |
| Устройство для захвата и трелевки лесоматериалов | 1990 |
|
SU1761564A1 |
| Устройство для бесчокерной трелевки леса | 1986 |
|
SU1359176A1 |
| Лесозаготовительная машина | 1982 |
|
SU1128872A1 |
| УСТРОЙСТВО ДЛЯ БЕСЧОКЕРНОЙ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1993 |
|
RU2083391C1 |


Изобретение относится к лесотехническому транспортному машиностроению. Цель изобретения - улучшение эксплуатационных характеристик. Устройство для бесчокерной трелевки деревьев содерзкит самоходное шасси 1, шарнирно закрепленную на нем стрелу 2 с челюстным захватом 3. На шасси 1 закреплена шарнирно телескопическая балка с внутренней 7 и наружной 9 частями. Внутри балки установлен гид- роцилиндр выталкивания 11, шарнирно связанный с упорным щитом 8. На верху в средней части щита 8 выполнена выемка для укладки пачки деревьев. На внутренней поверхности щита 8 закреплен упор 6 с полуцилиндрической боковой поверхностью для взаимодействия с захватом 3. 1 з.п. ф-лы, 13 ил.
cpuai
Изобретение относится к лесозаго- товительной технике и может быть использовано в лесной промьшшенности.
Цель изобретения улучшение экс плуатационных характеристик.
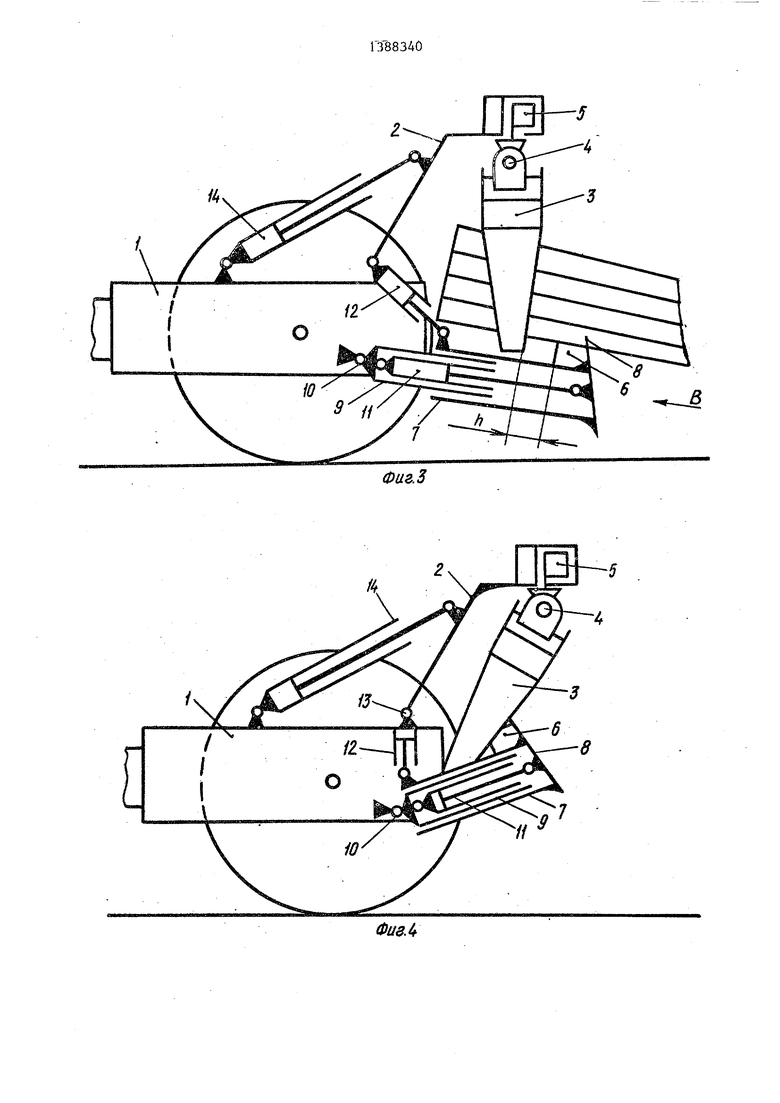
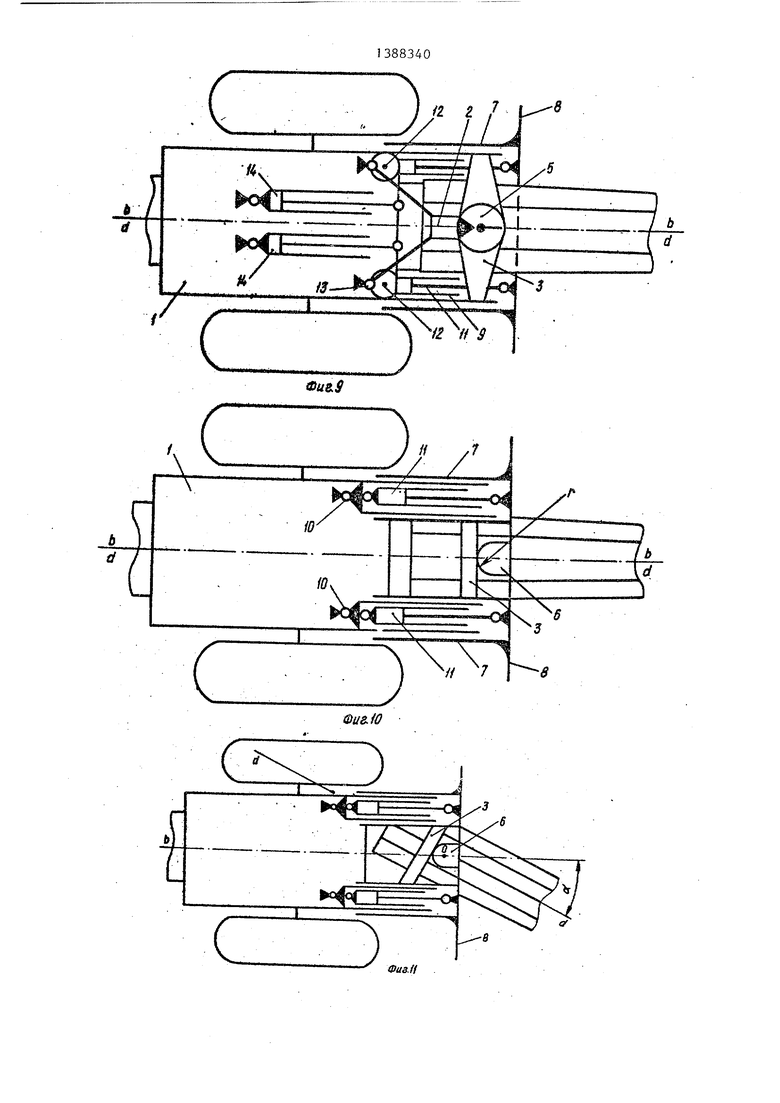
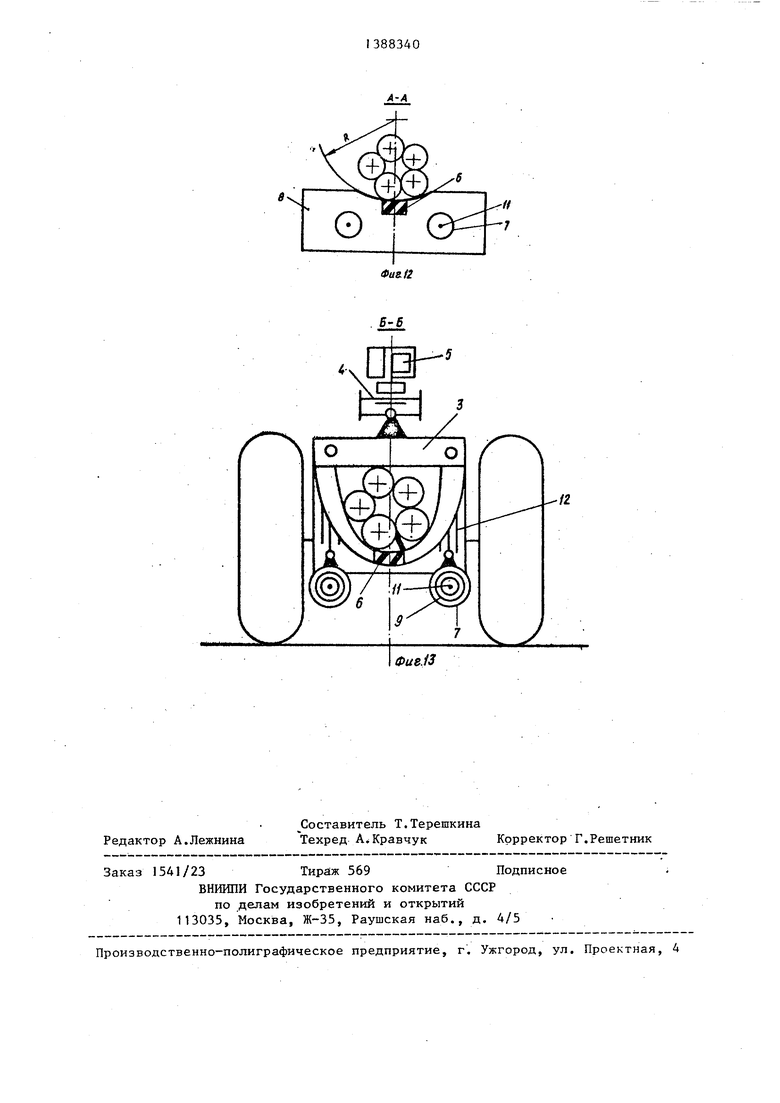
На фиг, показано устройство для бесчокерной трелевки древесины,, вид сбоку; на фиг.2 « то же, выравнива- ние торца пачки деревьев; на фиг.З то же, подвод упора на захват; на фиг.4 то же, транспортное положе ние при холостом ходе; на фиг.З - то же, начальный момент процесса са- МОвыталкивания; на фиг.6 - то же, второй этап процесса самовыталкива- ния; на фиг.7 то же, третий этап процесса самовыталкивания; на фиг.8 то же, четвертый этап цесса самовыталкивания; на фиг.9 - то же, вид сверху; на фиг.Ю - то же, вид снизу; на фиг. 11 - то же, вид снизу при повороте шасси; на фиг. 12 сечение на фиг.; на фиг. 13 се- чение Б-Б на фиг.3.
На задней части рамы 1 самоходно- го шасси смонтирована стрела 2 с че- люстным захватом 3, подвешенньм к стреле 2 с помощью универсального шарнира 4 и управляемым поворотным гидроцилиндром 5. Упор 6 предназна- чен для взаимодействия с клещами зах вата 3. На наружных трубах 7 телесно- пическ их балок жестко закреплен упор- ный щит 8. Внутренние трубы 9 телескопических балок связаны с задней полурамой 1 шарнирами 10. Гидроци- линдры 11 выталкивания расположены внутри телескопических балок. Штоки гидроцилиндров,11 шарнирно связаны с внутренними трубами 9. Гидроцилиндры 12 поворота в вертикальной продоль- ной плоскости балок установлены на задней полураме 1 с помощью шарни ров 13. Штоки гидроцилиндров 12 за креплены шарнирно на задней части на- ружных труб 7. Гидроцилиндры 14 пред- назначены для поворота в вертикаль- ной плоскости стрелы. Упор. 6 закреп- лен на верху средней чдсти щита 8, изготовлен из упругого материала, на- примерiрезины, и скруглен на боковой поверхности по радиусу г (фактический
45 захват 3. При таком укорачивании щит 8 скользит по пачке деревьев, двигаясь в направлении В. Задние колеса вращаются в направлении Г, самоходное шасси движется в направлении Д и производит трелевку пачки деревьев (рабочий ход). В процессе трелевки самоходное шасси иногда поворачивает и тогда между продольной осью bb шасси и осью пачки деревьев dd обра-
упор 6 вьшолнен в виде полуцилиндра).
На -верху средней части щита 8 сдела- сгзуется угол об . Щит 8 такому поворона выемка, скругленная по радиусу R,ту не мешает, он имеет выемку с раpaBHDt y диаметру пачки деревьев. Та-диусом R и перед щитом 8 находится
кая выемка (впадина) необходима длясвободное место, равное высоте упооблегчения поворота самоходного шас-ра 6. Захват 3 обкатывается по скруг0
5
0
Q
си. На поворотах 8 цит не мешает вра-- щению пачки деревьев вокруг точки (р (на угол об ) .
Устройство для бесчокерной трелев- ки леса работает следующим образом.
Гидроцилиндрами 11 и 12 раздвига- ют телескопические балки, опуская при этом щит В на грунт трелевочного волока. Заднее колесо вращается, самоходное шасси движется назад и выравнивает щитом 8 торец лежащей пачки деревьев. Если пачка деревьев расположена косо, то поворотным гидро цилиндром 5 устанавливают захват 3 поперек пачки деревьев. При этом захват 3 вращается вокруг вертикальной оси а-а. Самоходное шасси дает назад и. гидроцилиндрами 14 опускает стрелу 2 с открытым захватом 3 на пачку де- ревьев. При этом стрела 2 поворачивается вокруг шарнира 13 в вертикальной продольной плоскости. Затем закрывают захват 3 и поднимают пачку
5 деревьев, поворачивая стрелу 2. Манипулируя гидроцилиндрами 11 и 12, подводят щит 8 под пачку деревьев. Телескопические балки позволяют отводить щит 8 от задней полурамы 1, щит 8 упирается снизу и поддерживает пачку деревьев, разгружая таким образом стрелу 2. Блоки стара ются раз- .двигать побольше, с запасом, чтобы при подведении щита 8 не мешал зах-
5 ват 3. Между упором 6 и захватом 3 остается запас расстояния в форме зазора h.Нижняя часть захвата 3 из ка- . бины не видна (необозреваема), поэтому наличие зазора h облегчает подве0 дение щита 8 под пачку деревьев. Такое подведение производится интуитивно на ощупь. Далее гидроцилинд- рами 11 и 12 укорачивают балки, сводя зазор h до нуля и упирая упор 6 в
5 захват 3. При таком укорачивании щит 8 скользит по пачке деревьев, двигаясь в направлении В. Задние колеса вращаются в направлении Г, самоходное шасси движется в направлении Д и производит трелевку пачки деревьев (рабочий ход). В процессе трелевки самоходное шасси иногда поворачивает и тогда между продольной осью bb шасси и осью пачки деревьев dd обра-
0
/4
Л
сриг.2
Фиг. 2
Фае4
Фиг.5
Фие.6
Фиг.в
A
iZ Z
I f- I
у il
Фаз. ft
/-N
(0) / «
Фие.13
| Авторское свидетельство СССР № 1349141, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
