1
Изобретение относится к усторйствам контроля устойчивости судов и касается повышения безопасности мореплавания и научно-исследовательских целей.
Известны измерители собственной частоты и коэффициента демпфирования бортовой качки судна, содержащие датчик относительного крена, смещенный по вертикали от центра тяжести судна. Однако они не могут обеспечить получение достоверных данных ири любых условиях эксплуатации. Им присущи значительные ощибки в тех случаях, когда резонансная для данного судна составляющая обладает малой энергией, так как при этом средний период качки существенно отличается от периода свободных колебаний.
Целью изобретения является обеспечение возможности замеров на произвольном волнении и постоянного масщтаба измерения.
Для этого в предлагаемый измеритель введены еще один датчик относительного крена, смещенный по вертикали от центра тяжести судна на расстояние, отличное от смещения первого, электронно-лучевая трубка с двумя горизонтально и двумя вертикально отклониющими пластинами, а также два операционных усилителя и два инвертора, причем датчики относительного крена выполнены каждый в виде короткопериодного кренометра, механически связанного с потенциометрическим
преобразователем угла, содержащим двил{ок, соединенный на выходе каждый со своим подстроечным резистором, при этом оба подстроечных резистора через первый конденсатор соединены с входом первого операционного усилителя, в цепи обратной связи которого установлен свой резистор, причем выход первого операционного усилителя соединен с одной из горизонтально отклоняющих пластин электронно-лучевой трубки и через первый инвертор с другой пластиной, к тому же выход первого инвертора соединен и с регулируемыми конденсатором и резистором, связанными на выходе между собой, с выходами обоих резисторов датчиков крена и через второй конденсатор с входом второго операционного усилителя, имеющего в цепи обратной связи свой резистор, при этом выход второго операционного усилителя соединен с одной из вертикально отклоняющих пластин электронно-лучевой трубки и через второй инвертор с другой пластиной.
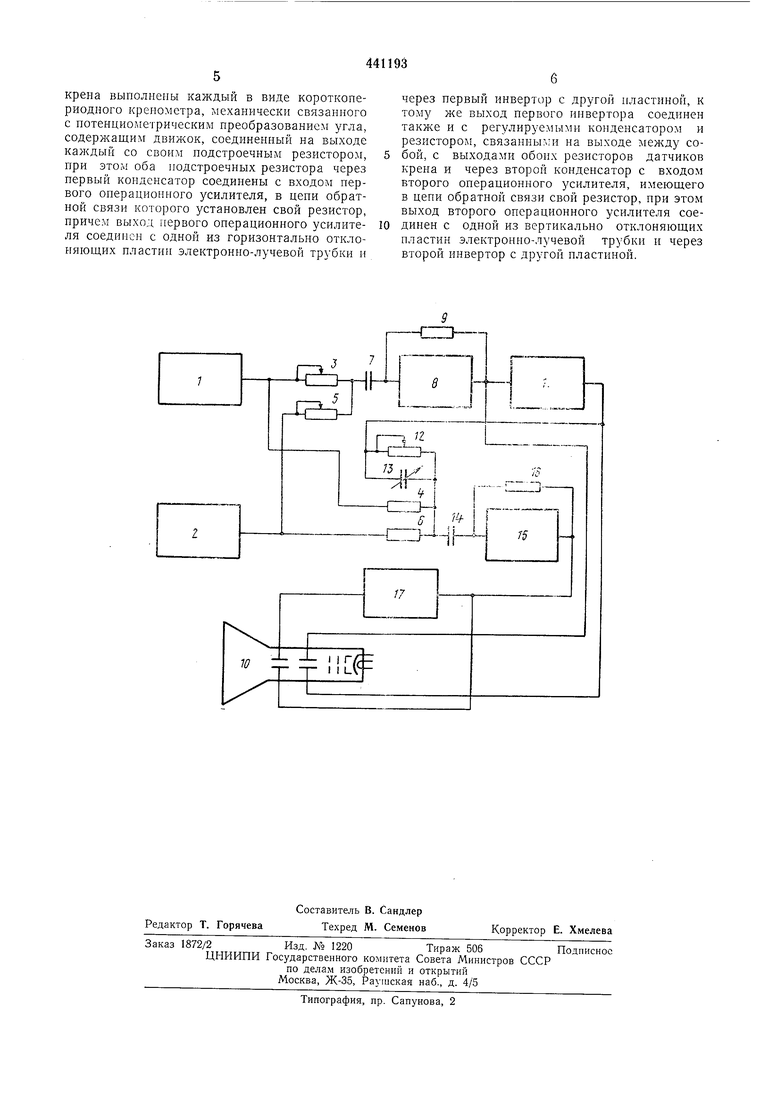
На чертел е показана структурная электрическая схема описываемого измерителя.
Датчики 1 и 2 относительного крена представляют собой короткопериодвые кренометры, механически связанные с потенциометрическими преобразователями угла. потенциометра датчика 1 соединен с подстроечным резистором 3 и резистором 4, а движок
потенциометра датчика 2 - с подстроенным резистором 5 и резистором 6. Подстроенные резисторы 3 и 5 нерез конденсатор 7 соединены с входом операционного усилителя 8, в цепи обратной связи которого стоит резистор 9. Выход усилителя 8 соединен с горизонтально отклоняющей пластиной электронно-луневой трубки 10, а нерез инвертор 11 - с второй горизонтально отклоняющей пластиной. С выходом инвертора 11 соединены также регулируемые резистор 12 и конденсатор 13, включенные совместно с резисторами 4 и 6 нерез конденсатор 14 на вход операционного усилителя 15, в цепи которого стоит резистор 16. Одна вертикально отклоняющая пластина электронпо-луневой трубки 10 непосредственно соединена с выходом усилителя 15, а другая пластина - нерез инвертор 17.
Сигналы датчиков 1 и 2 связаны с относительным углом канки выражениями
д;, 9 - а - - (8), g
а - -15- в,
X, g
где Xi я Xz - сигналы датников 1 и 2,
Г} и Г2 - расстояния по вертикали датчиков 1 и 2 от центра тяжести судна, в, в - угол крена судна и его вторая
производная, а - угол поверхностного волнового
склона,
g - ускорение силы тяжести. В уравнении бортовой качки, помимо главной части возмущающего момента, учитывается также составляющая, пропорциональная скорости изменения угла волнового склона
0 + 239 -f №0 в - 28а -f шоя,
где б - коэффициент демпфирования бортовой канки,
«о - собственная частота бортовой качки. Тогда сигналы датчиков 1 и 2 можно записать в следующем виде:
ri
Гг
х, (1 + шо) (в-а)+ (в -а);
о
f 1 + u)ol (9 а) -f 23 (в - а).
X. g /g
Измеритель работает следующим образом.
При наличии бортовой качки судна сигналы с датчиков 1 и 2 поступают с разными знаками на вход сумматора, образованного операционным усилителем 8, резистором 9 обратной связи и подстроечными резисторами 3 и 5. При этом коэффициент, с которым суммируется сигнал датчика 1, с помощью подстроенного резистора 3 устанавливается пропорциональным расстоянию по вертикали датчика 2 от центра тяжести судна, а коэффициент, с которым суммируется сигнал второго датчика, с помощью подстроенного резистора 5 устанавливается пропорциональным расстоянию от первого датчика до центра тяжести судна. Конденсатор 7 отфильтровывает постоянную составляющую. В этом случае сигнал YI на выходе усилителя 8 равен
У , - Г.Х., - (r.j - г,) (0 - а).
Сигнал с выхода усилителя 8 поступает на горизонтально отклоняющую пластину электронно-лучевой трубки 10, а через инвертор 11 - на вторую горизонтально отклоняющую пластину. Одновременно сигналы с датчиков 1 и 2 через входные резисторы 4 и 6 поступают с разными знаками на вход онерационного усилителя 15, куда также поступает через регулируемый резистор 12 с коэффициентом К. передачи сигнал с выхода инвертора 11, а через регулируемый конденсатор 13 с коэффициентом передани его производная. Тогда сигнал на выходе усилителя 15 определяется следующим образом:
7, : л:, - , + К, 7, + KJ, (г, - /-,) X
2
X-(e-a)-/rЛl-.)(в--.)+
5
+ -(г.- г,) (9 - а) - К (г, - г,) (в - а)&
Полученный сигнал с выхода усилителя 15 и инвертора 17 поступает на вертикально отклоняющие пластины. Лун выписывает на экране электронно-луневой трубки 10 замкнутые кривые относительно некоторой линии, наклоненной под углом к горизонтальной оси. Далее осуществляется поиск таких значений коэффициентов /Ci и Кч передачи, нри которых кривые сл имаются в линию и угол наклона становится равны.м нулю. При этом
А- - 26
У, О И /,
А 2 -
В этом случае по щкале, связанной с резистором 12, может отсчитываться значение собственной частоты, а по шкале, связанной с конденсатором 13, - значение коэффициента демпфирования.
Предмет изобретения
Измеритель собственной частоты и коэффициента демнфирования бортовой качки судна, содержащий датчик относительного крена, смещенный по вертикали от центра тяжести
судна, отличающийся тем, что, с целью обеспечения возможности замеров на произвольном волнении и постоянного масштаба измерения, в измеритель введены еще один датчик относительного крена, смещенный но вертикали от центра тяжести судна на расстояние, отличное от смещения первого, электронно-лучевая трубка с двумя горизонтально и двумя вертикально отклоняющими пластинами, а также два операционных усилителя и
два инвертора, причем датчики относительного
креиа выполнены каждый в виде короткопериодного кренометра, механически связанного с нотенциометрическим преобразованием угла, содержащим движок, соединенный на выходе каждый со своим подстроечным резистором, при этом оба нодстроечных резистора через первый конденсатор соединены с входом первого операционного усилителя, в цепи обратной связи которого установлен свой резистор, причем выход первого операционного усилителя соединен с одной из горизонтально отклоняющих пластин электронно-лучевой трубки и
через первый инвертор с другой пластиной, к тому же выход первого инвертора соединен и с регулируемыми конденсатором и резистором, связанныг ;и на выходе между собой, с выходами обоих резисторов датчиков крена и через второй конденсатор с входом второго операционного усилителя, имеющего в цепи обратной связи свой резистор, при этом выход второго операционного усилителя соединен с одной из вертикально отклоняющих нластин электронно-лучевой трубки и через второй инвертор с другой пластиной.

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ИЗМЕРИТЕЛЬ СОБСТВЕННОЙ ЧАСТОТЫ БОРТОВОЙ КАЧКИ СУДНАВПТБЛ(^!!Л ^?!П.~Г'^т;^^ Ji ^'bni\. ^.;Ь.ГиГ й^Й | 1971 |
|
SU428980A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОБСТВЕННОЙ ЧАСТОТЫ БОРТОВОЙ КАЧКИ СУДНА | 1973 |
|
SU394258A1 |
| Устройство для определения динамических наклонений морского судна на качке | 1987 |
|
SU1525461A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПОСАДКИ АВАРИЙНОГО ПОДВОДНОГО ОБЪЕКТА В НАДВОДНОМ ПОЛОЖЕНИИ В УСЛОВИЯХ КАЧКИ | 1997 |
|
RU2116929C1 |
| АКТИВНЫЙ УСПОКОИТЕЛЬ БОРТОВОЙ КАЧКИ СУДНА | 2015 |
|
RU2616505C1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| Корректор угла крена для успокоителя бортовой качки судна | 1974 |
|
SU468831A1 |
| Судовой электронный кренодифферентометр | 2023 |
|
RU2817308C1 |
| Устройство для амортизирующего крепления надстройки к корпусу судна | 1986 |
|
SU1311998A1 |
| Устройство для измерения углов бортовой и килевой качки судна | 1986 |
|
SU1434254A1 |
ir
w zz
ггэ-ЧН «
f
