Изобретение относится к электротехнике, а именно к электроприводам, и может быть использовано в установках с периодически изменяющейся перемещаемой массой, требующих линейного перемещения и точного позиционирования, например в промышленных роботах.
Цель изобретения - повышение точности позиционирования исполнительного органа.
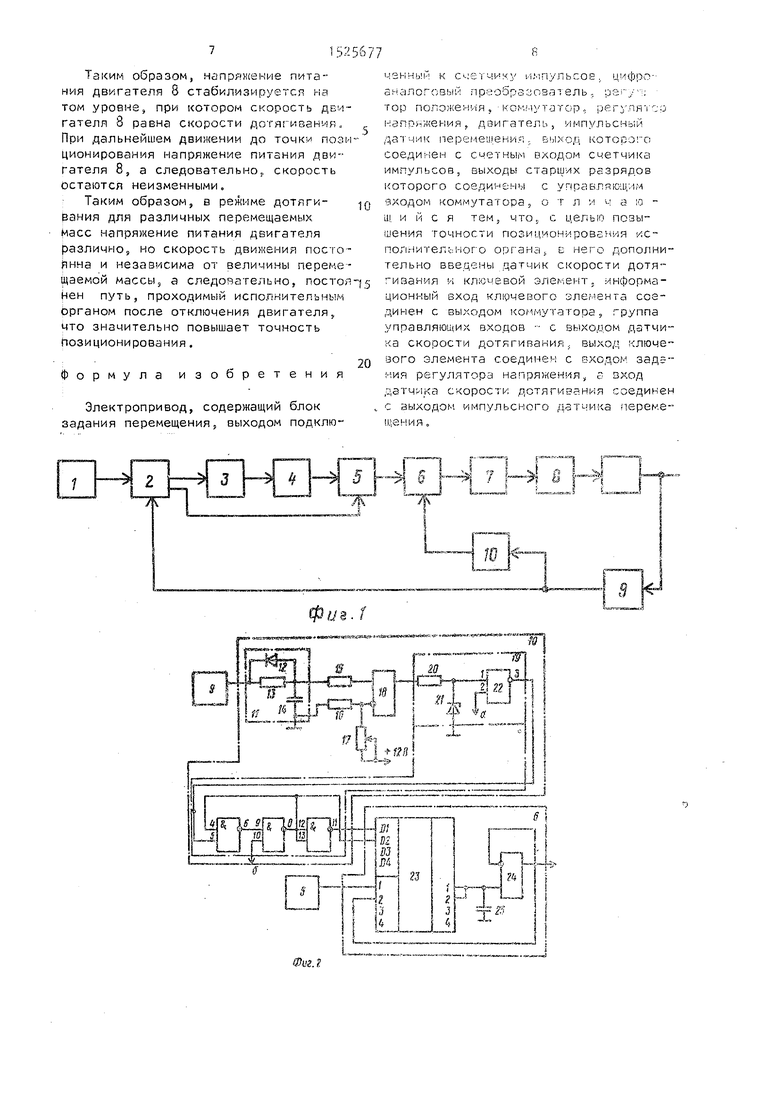
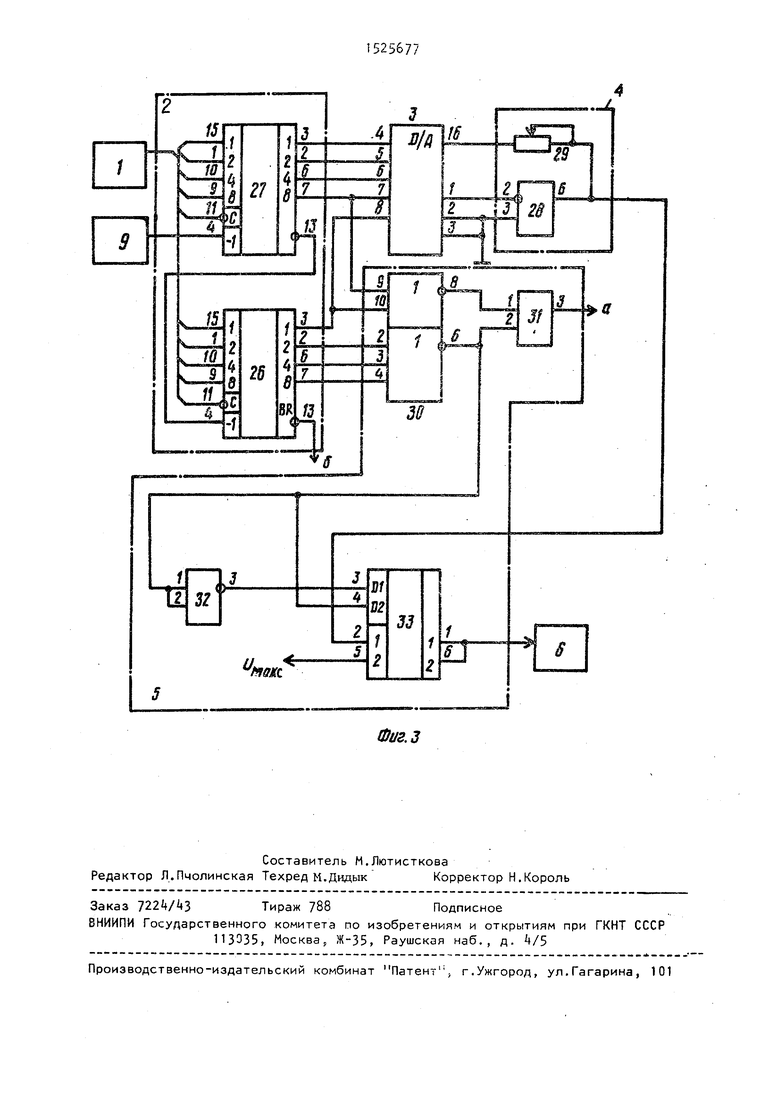
На фиг. 1 показана функциональная схема электропривода; на фиг.2 приведена принципиальная электрическая схема ключа и датчика скорости дотягивания; на фиг. 3 - принципиальмая электрическая схема счетчика им- пульсоз, цифроаналогсвого преобразователя, регулятора положения и коммутатора ,
Электропривод содержит блок I задания, счетчик импульсов 2, цифроанал говый преобразователь За регулятор k положения, коммутатор 5, ключевой зяемент 6, регулятор 7 напряжения, двигатель 8, импульсный датчик 9 перемещения и датчик 10 скорости дотягивания,
; Датчик 10 скорости дотягивания с|одержит интегрирующую цепочку 11} состоящую из шунтирующего диода 12, резистора 13 и конденсатора , резисторы 15 - 17, компаратор 18, согласующую цепь 19, состоящую из ре- .aJHCTopa 20, стабилитрона 21 и элемента И-НЕ 22.
Ключевой элемент 6 образуют коммутатор 23, усилитель 2 и конденсатор 25.
Счетчик импульсов содержит счетчик 26 старших разрядов и счетчик 27 младших разрядов.
Регулятор положения образуют услитель 28 и переменный резистор 29 обратной связи.
Коммутатор 5 состоит из элементов ИЛИ-НЕ 30, элемента И 31, элемента И-НЕ и ключа 33.
Сигнал а разрешает срабатывание элемента И-НЕ 22 для исключения ложного срабатывания элемента И-НЕ 22 при разгоне двигателя 8, когда скорость двигателя 8 равна скорости дотягивания. Сигнал сброса б формируется в виде О на выходе счетчика 27 младших разрядов при достижени исполнительным органом требуемой точки позиционирования,
В режиме дотягивания на низкой скорости до точки позиционирования скорость не зависит от величины перемещаемой массы. Последнее условие достигается тем, что напряжение питания, поступающее на двигатель 8 с регулятора 7 напряжения, стабилизируется на том уровне, при котором скорость двигателя 8 равна скорости дотягивания.
При достижении точки позиционирования двигатель В отключается, но исполнительный орган продолжает двигаться и проходит путь, определяемый кинематической энергией и силой сопротивления движению (при
отсутствии спец альных устройств):
1ормозных
8 тУг/2F,
5
0
5
0
5
0
5
0
5
-де
m -
FC V
путь, проходимый исполнительным органом от момента отключения двигателя 8 до полной остановки; перемещаемая масса;, сила сопротивления движению; скорость исполнительного орга на в момент отключения питания двигателя.
При использованиУ цилиндрического линейного двигателя (асинхронного) с установкой подвижного вторичного элемента на подшипники скольжения связь между силой сопротивления движению F и перемещаемой массой m можно выразить через коэффициент трения в подшипниках опор f:
.
Таким образом, сила сопротивления да.жению F пропорциональна перемещаемой массе т, следовательно, остановочный путь S определяется скоростью исполнительного органа в момент отключения двигателя.
Электропривод работает следующим образом.
Из блока 1 задания величина требуемого перемещения в виде цифрового двоичного кода передается на вход предустановки счетчика 2 импульсов. Запись производится кратковременным импульсом в виде О, подаваемым на вход счетчиков 2б и 27 мл.адших и старших разрядов. При реализации электропривода предварительно задаются расстояния, при которых должны срабатывать коммутатор 5 и элемент И-НЕ22. В данном примере эти расстояния сое-. тавляют соответственно 31 и 7 импульсов до точки остановки,
Сигнал о том, что расстояние до точки позиционирования меньше или равно 31, в виде 1 формируется на выходе элемента ИЛИ-НЕ 30, на вход которого подаются старшие разряды счетчика 2 импульсов. Сигнал а в виде 1 появляется на аыходе элемента И 31, если расстояние до точки позиционирования меньше или равно 7.
Младшие пять разрядов счетчика 2 импульсов (дающие максимальное число ЗО подключены на входы цифроана- логозого преобразователя 3 Выходы
цифроаналогового преобразователя 3 сединены с входами регулятора k положения. Коэффициент передачи, регулятора положения определяется переменным резистором 29 обратной связи.
Пои задании больших перемецений (больше 31 импульса) на выходе элемента ИЛИ-НЕ 30 присутствует О, так выходе по меньшей мере одного из старших разрядов счетчика 2 импульсов (выходы счетчика 27 старших разрядов) присутствует 1. При этом на цифровом входе ключа 33 присутствует О, на аналоговом входе ключа 33 присутствует максимальный сигнал управляющего напряжения.
При малых перемещениях (меньше 31 импульса) на выходе элемента ИЛИ-НЕ 30 присутствует 1, Этот сигнал инвертируется элементом И-НЕ 32 и в виде О поступает на вход ключа 33. В результате на выход ключа 33 пропукается аналоговый сигнал с регулятора положения, поступающий на вход ключа 33 Величина этого сигнала пропорциональна расстоянию, оставшемуся до точки позиционирования. Далее сигнал управления с выхода коммутатора 5 поступает на вход ключа б (вход коммутатора 23).
Схема датчика 10 скорости дотягивания, выходные сигналы которого поступают на цифровые входы D1 и D2 коммутатора 23 ключевого элемента, обеспечивает прохождение сигнала управления с коммутатора 5 через ключевой элемент вход регулятора 7 напряжения. При этом на входе D1 коммутатора 23 присутствует О, а на входе D2 - 1. Из регулятора 7 напряжения напряжение питания поступает на двигатель 8 и он начинает перемещаться. При этом импульсный датчик 9 перемещения формирует импульсы отработки перемещения, количество которых определяет пройденный путь, а длительность каждого импульса характеризует скорость движения в данный момент. Импульсы с импульсного датчика 9 перемещения поступают на счетный вход счетчика 2 импульсов (вход счетчика 27 младших разрядов), в результате чего числовой код на выходе счетчика 2 импульсов в каждый момент времени соответствует расстоянию до точки позиционирования. До срабатывания коммутатора 5 (в данном случае при рас
0
5
стоянии более 31) двигатель 8 управляется максимальным напряжением (c« поступающим на вход ключа 33 После срабатывания коммутатора 5 напряжение на двигателе 8 определяется сигналом, поступающим из регулятора А положения, который соответствует числовому коду на выходе счетчика 2 импульсов. Следовательно, при приближении к точке позиционирования напряжение питания двигателя 8 уменьшается и скорость также уменьшается. Длительность импульсов, формируемых импульсным датчиком 9 перемещения, с уменьшением скорости увеличивается. Импульсы с выхода импульсного датчика 9 перемещения поступают на вход датчика 10 скорости дотягивания. При этом в течение длительности импульса заряжается конденсатор 1, а следовательно, растет напряжение на неинвертирующем входе компаратора 18. За время паузы конденсатор 1 быстро разряжается через шунтирующий ди- од 12.
При снижении скорости двигателя 8 до скорости дотягивания длительность, импульса становится достаточной для того, чтобы напряжение на конденсаторе И возросло до величины, превышающей напряжение уставки на инвертирующем входе компаратора 18,. На выходе компаратора 18 появляется 1. При этом на выходе элемента И-НЕ 22 появляется О, который блокируется через обратную связь, В дальнейшем нулевой сигнал на выходе 8 элемента И-НЕ 22 не изменяется в течение всего времени движения до точки позиционирования .
В момент появления .на выходе элемента И-НЕ 22 сигнала О срабатывает ключевой элемент 6, в котором на цифровых входах D1 и D2 коммутатора 23 меняются сигналы управления. В результате один аналоговый вход коммутатора 23 закрывается, а другой соединяется с выходом усилителя 24 и далее через усилитель 2Ц поступает на вход регулятора 7 напряжения. Поскольку вход коммутатора 23 соединен с выходом усилителя 24, то на регулятор 7 напряжения в дальнейшем поступает сигнал, равный последнему значению сигнала, поступившего из регулятора 4 положения перед срабатыванием ключевого элемента 6.
0
5
0
0
5
7152
Таким образом, напряжение питания двигателя 8 стабилизируется на том уровне, при котором скорость двигателя 3 равна скорости дотягивания., При дальнейшем двиншнии до точки пози ционирования напряжение питания двигателя 8, а следовательно,, скорость остаются неизменными.
Таким образом, в режиме дотяги- рания для различных перемещаемых масс напряжение питания двигателя различно, но скорость движения постоянна и независима от величины перемещаемой массы, а следовательно, постоя йен путь, проходимый исполнительным органом после отключения двигателя., мто значительно повышает точность позиционирования.
Формула изобретения
Электропривод, содержащий блок задания перемещения, выходом подклю5
67
JQ fg
0
8
Ч2ННЫЙ К С1.;етчику импульсов цифро-аналоговый преобрззозатель, psiv ; тор положения ,-ком/.утатор , pery.nH i --; j напряжения , дтзигатель , импульсный датчик перемеи ения; выход которо -о соединен с сметным входом счетчика импульсов, выходы старш-их разрядов которого соединены с управляЮ Щим входом коммутатора, о т л и ч а ю - ш, и и с я тем, что,, с целью повышения точности позиционировБния исполнительного органаJ в него дополнительно введены датчик скорости дотягивания и ключевой элемент, информационный вход кл19чевого элемента соединен с выходом коммутатора, группа управляющих входов с вьзходом датчика скорости дотягивания, выход ключевого элемента соединен с входом задг- ни,ч регулятора напряжения, 5 вход датчика скорости дотягивания соединен с выходом импульсного датчика г.ереме- щения„
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмом резания листорезальной машины | 1988 |
|
SU1541559A1 |
| Система управления для электропривода | 1987 |
|
SU1464275A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Цифровой позиционный электропривод | 1978 |
|
SU773881A1 |
| Устройство управления позиционированием | 1987 |
|
SU1462248A1 |
| Электропривод постоянного тока | 1986 |
|
SU1365325A1 |
| Электропривод | 1988 |
|
SU1656652A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВОЙНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2037263C1 |
| Устройство для программного счета витков из гибкого материала | 1985 |
|
SU1298783A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
Изобретение относится к электротехнике, а именно к электроприводу, и может быть использовано в установках с периодически изменяющейся перемещаемой массой, осуществляющих линейное перемещение и точное позиционирование. Целью изобретения является повышение точности позиционирования исполнительного органа. Электропривод содержит блок задания, счетчик импульсов, цифроаналоговый преобразователь, регулятор положения, коммутатор, регулятор напряжения, двигатель и импульсный датчик перемещения, выход которого соединен со счетным входом счетчика импульсов, выходы старших разрядов которого соединены с управляющим входом коммутатора. В электропривод дополнительно вводятся ключевой элемент и датчик скорости дотягивания, причем ключевой элемент установлен между коммутатором и регулятором напряжения, к группе управляющих входов ключевого элемента подключен выход датчика скорости дотягивания, а к его информационному входу подключен выход коммутатора, входом датчика скорости дотягивания является выход импульсного датчика перемещения. Изобретение может быть использовано в электроприводах промышленных роботов. 3 ил.
Фиг. 1
Фиг. 2
| Батоврин А.А | |||
| Цифровые системы управления электроприводами | |||
| - Л.: Энергия, 1977, с | |||
| Насос | 1917 |
|
SU13A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Башарин А.А | |||
| и др | |||
| Управление электроприводами | |||
| - Л.: Энергия, 1982, с | |||
| Способ нагрева эквипотенциального катода в электронных вакуумных реле | 1921 |
|
SU266A1 |
| ГРОМКО - ГОВОРЯЩИЙ ТЕЛЕФОН | 1920 |
|
SU723A1 |
| . | |||
