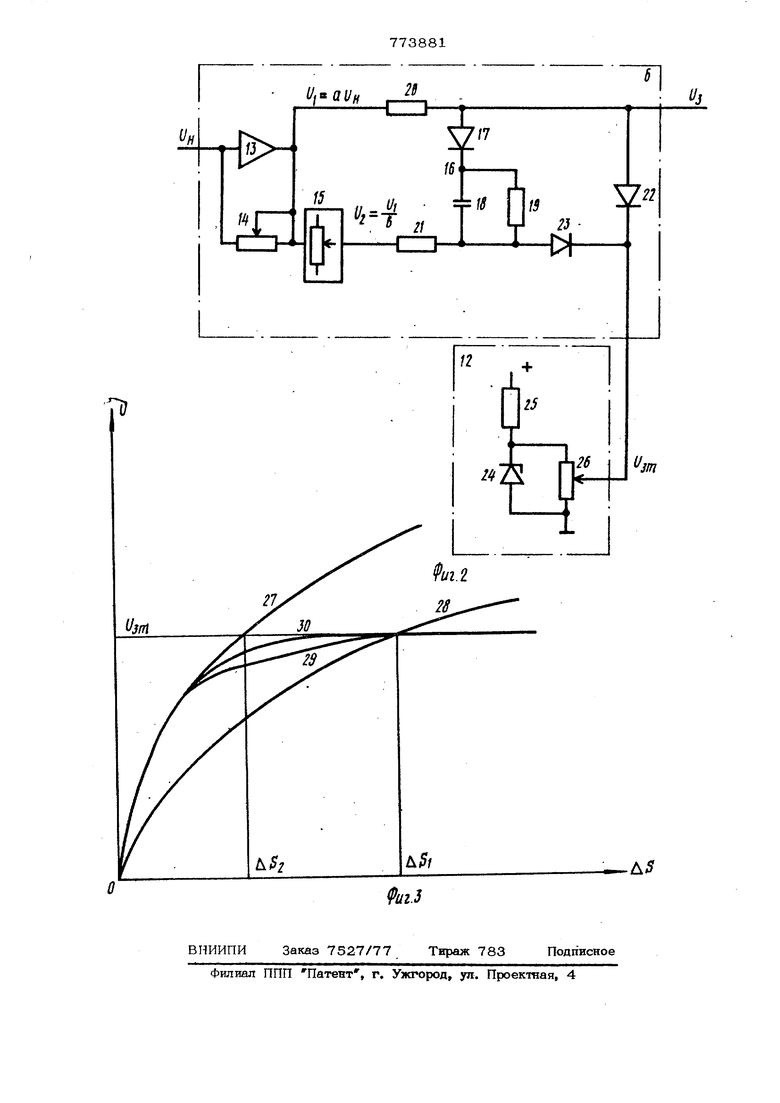
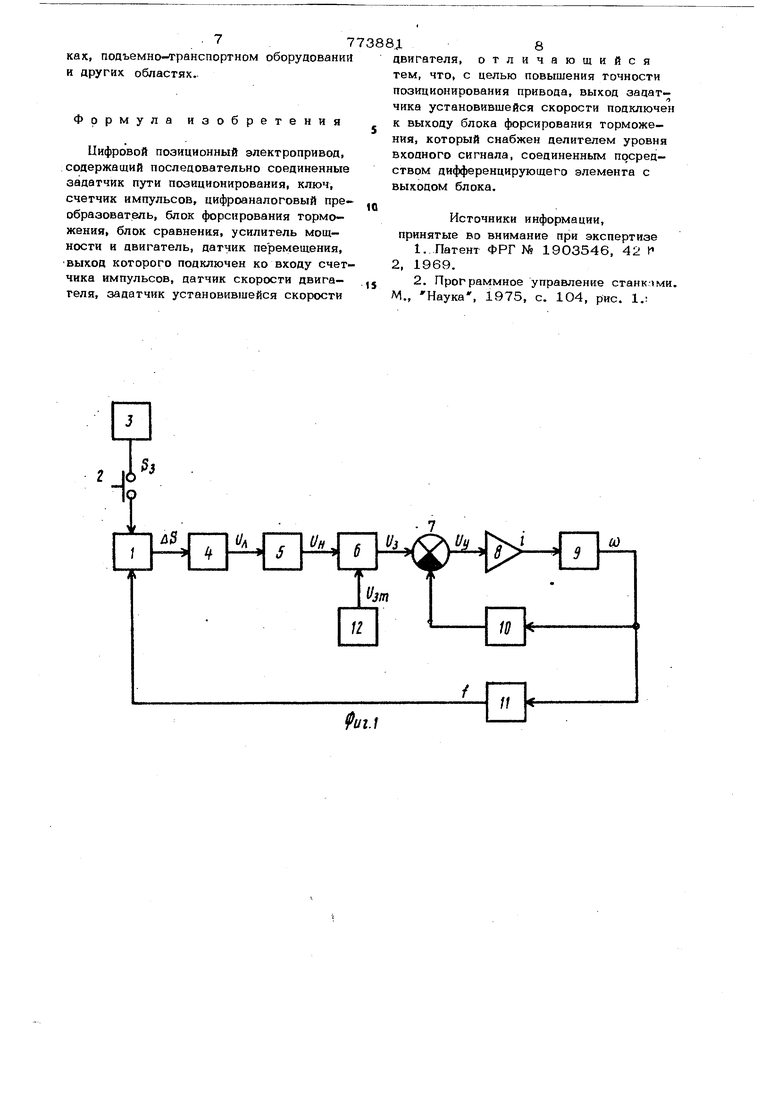
Изобретение относится к автоматизированному электроприводу и может быть использовано в приводах, осуществляющих позиционирование различных объектов, например в приводах подачи материала автоматических линий попереч ного раскроя рулонного проката. Известен цифровой позиционный элект ропривод, содержащий счетчик импульсов цифрраналоговый преобразователь, регу лируемый двигатель и включенный на вход счетчика импульсов датчик импульсов перемещения, функциональный нелинейный преобразователь и задатчик усганоЁившейся скорости двигателя .Ш . В этом приводе не учитывается инерционность нарастания тормозного тока двигателя, вызывающая расхождение меж ду кривой,задаваемой функциональным не линейным преобразователем, и действи- тельной кривой снижения скорости двигателя. Наиболее близким по технической сущ ности является цифровой позиционный электропривод, содержащий последовательно соединенные задатчик пути позиционирования, ключ, счетчик импульсов, цифроаналоговый преобразователь, функциональный нелинейный преобразователь, блок форсирования торможения, блок сравнения, усилитель мощности и двигатель 21 Блок форсирования торможения представляет собой источник постоянного напряжения, направленный встречно сигналу с выхода функционального нелинейного преобразователя. При работе двигателя на установившейся скорости источник встречного напряжения отключен. Он включается в начальной точке пути замедления, когда скорость, задаваемая функциональным нелинейным преобразователем становится ниже уровня установившейся скорости. При его включении создается скачок напряжения, обеспечивающий форсированное нарастание фронта тормозного тока, которое ускоряет переход двигателя в тормозной режим. Однако резкое возрастание тормозного момента двигателя про- является как уаар, действующий на приводимый объект. Такой уаар сам по себе может быть недопустимым, например, в приводах пассажирских лифтов. Кроме того, при ударе возникают кратковременные повышенные упругие деформации в механической передаче, которые служат источником появления в приводе различных механических колебаний, снижающих гочност поаиционирования. Для обеспечения точности применяют дотягивание привода на пониженной скорости, но это свяаано со значительными потерями времени. Цель изобретения - повышение плавности перехода в тормозной режим, повышение точности позиционирования и снижение потерь времени при торможении привода. Эта цель достигается тем, что в известном цифровом позиционном приводе выход задатч 1ка установившейся скорости подключен к выходу блока форсирования торможения, который снабжен делителем уровня входного сигнала, соединенным посредством дифференцируюшего элемента свыходом блока. На фиг. 1 изображена функциональная схема привода; на фиг. 2 - схема блока форсирования торможения и задатчика скорости двигателя; на фиг. 3 -.графики зависимостей от остатка пути перемещения напряжений, имеющихся в приводе. К входу ввода чисел счетчика 1 импульсов через ключ 2 присоединен задагчик 3 пути позиционирования. К выходу счетчика 1 импульсов последовательно друг за другом присоединены цифроана- логовый преобразователь 4, функциональный нелинейный преобразователь 5, блок б форсирования торможения, схема 7 сравнения, усилитель 8 мощности и регулируемый двигатель 9. Соединенный с валом последнего тахогенсратор 10 подключен ко второму входу схемы 7 срав- нения. Механически связанный с двигателем 9 датчик 11 импульсов перемещения включен на вычитающий вход счетчика 1 импульсов. К блоку 6 форсирования торгможения- присоединен задатчик 12 установившейся скорости двигателя. Блок 6 форсирования торможения включает в себя усилитель 13 входного сигнала с регу лятором 14 коэффициента усиления, вклю ченный на вход усилителя 13 делитель 15 входного сигнала и дифференцирующий элемент содержащий диод 17, конденсатор 18 и резистор 19 и подключен ный через резисторы 20 и 21 к выходам усилителя 13 и делителя 15, а также че pea рааделительные вентили 22 и 23 к выходу зодатчнка 12 установившейся скорости двигателя. Узел соединения диода 17, резистора 2О и вентиля 22 является также выходным выводом блока 6. Задатчик 12 установившейся скорости двигателя состоит из источника опорного напряжения , выполненного на стабилитроне 24 и резисторе 25, и потенциометре 26, движок которого соединен с .выходным выводом задатчика 12. Работа цифрового позиционного электропривода осуществляется следующим образом. В исходном состоянии ключ 2 разомкнут, число Д5 на выходе счетчика 1 равно нулю. Также равны нулю напряжения -U - на выходе цифроаналогового преобразователя 4, У -на выходе функционального нелинейного преобразователя 5, Uj- на выходе блока 6 форсирования торможения, (in - на выходе схемы 7 сравнения. Равен нулю ток ч на выходе усилителя 8 мощности. Вал двигателя 9 неподвижен, равны нулю его угловая скорость СО и напряжение U ц на выходе тахогенератора 10. Также равна нулю и частота импульсов на выходе датчика 11 импульсов перемещения. На выходе задатчика 12 установившейся скорости двигателя присутствует напряжение U , установленное движком потенциометра 26, но оно изолировано направленными встречно вентилями 22 и 23 блoкa 6. Кратковременным замыканием ключа 2вводят в счетчик 1 из задатчика 3число 5 равное задаваемому пути перемещения приводимого двигателем 9 объекта. На выходе счетчика 1 появляется число , которое преобразуется цифроаналоговым : преобразователем 4в линейно зависимое от д6 напряжение О д . Это напряжение поступает в не- линейный преобразователь 5. С выхода последнего напряжение Уц поступает в блок 6, где усиливается усилителем 13. Задаваемое перемещение S з значительно превышает путь торможения, поэтому вначале напряжение (J на выходе усилителя 13 превышает напряжение . При этом напряжение на выходе блока 6 I а разность напряжений падает на резисторе 2О. Напряжение (J 15 до величины снижается делителем 15 до ® Вначале -т- , где в м.. оначале также а разность этих наггряжений падает на резисторе 21. Ток через диод 17 и резистор 19 не протекает, напряжение на конденсаторе 18 равно нулю. Напряжение U.j- с выхода блока б проходит через схему 7 сравнения и поогупаег на вход усилителя 8. Двигатель 9 начинает разгоняться. Разгон прекращается, когда на пряжение тахогенератора 10 Ud . вычит ясь в схеме 7 сравнения из напряжения ЪТ оТран11чит подводимый к двигателю 9 ток i от усилителя 8. Наступает уст;ановившийся режим работы двигателя при котором его скорость со постоянна и равна установившейся скорости, задаваемой зацатчиком 12. Величина установившейся скорости определяется требованиями, предъявляемыми к приводу пере- мешаемым объектам. Во время вращения вала двигателя 9 датчик 11 вырабатывает импульсы, частота которых i. пропорциональна угловой скорости СО вала двигателя, а количест- во - пути перемещения объекта. Импульсы поступают в счетчик 1,Где вычитаются из введенного в него числа S э На выходе счетчика 1 число uS Sj-Srf где 5й - пройденный действительно путь, равный числу поступивших от датчика 11 импульсов. Остаток д5 пути перемещения непрерывно уменьшается, соответственно уменьшаются и напряжения и и Ц 2 , но пока они превышают величину U о .J- , перемещение происходит с установившейся скоростью. С момента, когда остаток пути перемещения становится меньше (см. фиг. 3), начинается процесс замедления и остановки привода, На фиг. 3 кривая 27 изображает зависимость и от Д5 , кривая 28 - зависимость и 2 от д 5 I кривая 29 - зависимость .соответствующего . задаваемой скорости напряжения U о от iS и кривая 30 - зависимость соответствующего дей ствительной скорости напряжения Urf от iS, Начиная с точки , напряжение U 2 становится меньше напряжения а напряжение (J еще остается равным у. Начинает протекать через диод 17 ГОК заряда конденсатора 18, а также и ток, протекающий в резисторе 19, но последним током можно пренебречь ввиду большого сопротивления резистора 19. Протекающий через диод 17 ток создает на резисторе 20 дополнительное падение напряжения, снижающее напряжение U. KOTQpoe становится меньше Urf- . На выходе схемы 7 сравнения появляется напряжение и и с отрицательным знаком. Ток 4 на выкоде усилителя 8 меняет направление, и двигатель 9 начинает тормозиться. Ввиду инерционности процесса изменения направления и величины тока, питающего двигатель, во время этого изменения действительная скорость двигателя отстает от задаваемой (кривые 2.9 и 30 на участке между точками Л5 и &&2 ) Разность напряжений ( U2 непрерывно увеличивается при перемещении от точки iiS до точки Ъу а затем при снижении (J ниже уровня Ьзт начинает уменьшаться. Соответственно этому- вначале непрерывно протекает ток заряда конденсатора 18, снижающий кривую 29, а затем этот гок прекращается и кривая 29 сливается с кривой 27. Примерно в той же точке должен установиться тормозной ток и кривая 30 должна также слиться с кривой 27. Этого достигают регулировкой расстояния д5 -А52С помощью делителя 15. В дальнейшем торможение продолжается при установившемся тормозном токе и действительная скорость непрерывно равна заданной, которая изменяется в зависимости от Д 5 в соответствии с изменением напряжения Ujf . Диод 17 предотвращает разряд конденсатора 18 на резистор 2О и нежелательное отклонение кривой 29 от кривой 27 в конце пути торможения. Разряд конденсатора 18 происходит через резистор 19. Функциональный нелинейный преобразователь 5 придает кривой 27 форму, соответствующую оптимальному по быстродействию и точности позиционирования процессу торможения. Регулятор 14 коэффициента усиления усилителя 13 изменяет наклон кривых 27 и 28 и этим изменяет величину пути торможения и следовательно, величину замедления при торможении. Так как разность на пряжений U - появляется и увеличивается плавно, также плавно нарастает и ток заряда конденсатора 18, плавно снижается напряжение Ua и плавно нарастает тормозной ток. Удара в момент начала торможения не происходит. Плавность процесса торможения позволяет повысить точность позиционирования и сократить потерн времени при торможения. Эти показатели являются основными для позиционного привода, широко применяемого в прокатном и кузнечно-штамповочном оборудовании, в стан- ках, подъемно-транспортном оборудований и других областях. Формула изобретения Цифровой позиционный электропривод, содержащий последовательно соединенные задатчик пути позиционирования, ключ, счетчик импульсов, цифроаналоговый преобразователь, блок форсирования торможения, блок сравнения, усилитель мощности и двигатель, датчик перемещения, выход которого подключен ко входу счетчика импульсов, датчик скорости двигателя, задатчик установившейся скорости 7 .J.8 двигателя, отличающийся тем, что, с целью повышения точности позиционирования привода, выход задат- чика установившейся скорости подключен к выходу блока форсирования торможения, который снабжен делителем уровня входного сигнала, соединенным посредством дифференцирующего элемента с выходом блока. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 1903546, 42 t 2, 1969. 2. Программное управление станками. М., Наука, 1975, с. 104, рис. 1.;
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный привод | 1978 |
|
SU822151A1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Цифровая система для позиционногоРЕгулиРОВАНия | 1979 |
|
SU824147A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Устройство для управления механизмом поворота экскаватора | 1989 |
|
SU1744209A1 |
| Способ старт-стопного управления шаговым двигателем | 1986 |
|
SU1363417A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |
| Устройство для программного управления | 1977 |
|
SU734620A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |