Изобретение относится к полиграфии, в частности к листорезальным ротационным маыинам.
Цель изобретения - упрощение устройства, повышение точности позиционирования, расширение области применения за счет устранения неопределенности между значениями действительной координаты и положения перемещаемого объекта при каждом новом включении устройства, увеличение количества точек позиционирования, т.е. перемещения объекта при позиционировании.
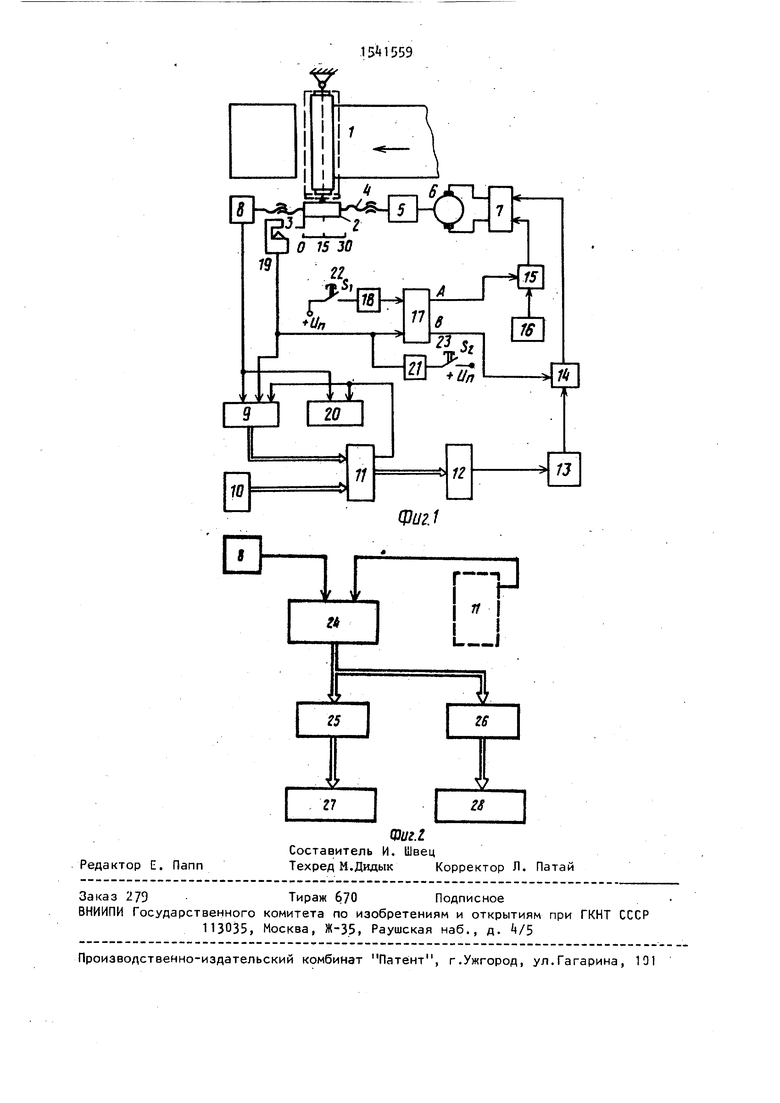
Па фиг. 1 приведена функциональная схема устройства; на фиг. 2 - функциональная схема блока индикации.
Устройство содержит механизм 1 резания, гайку 2, заслонку 3 винт 4, редуктор 5, двигатель 6, реверсивный
регулятор 7 скорости двигателя, импульсный датчик 8 частоты вращения винта (перемещения механизма резания), реверсивный счетчик 9 импульсов, цифрокодовый блок 10 задания перемещения механизма резания, сумматор-вычи- татель 11, преобразователь 12 код-напряжение, усилитель 13, блоки 1 и 15, коммутации, блок 16 задания нулевого положения механизма резания, управляющий блок 17, дифференцирующий элемент 18, фотоэлектрический датчик 19 фиксации нулевого положения объекта (механизма резания), блок 20 индикации, дифференцирующий элемент 21, кнопки 22 S, и 23 S2.
Блок индикации содержит реверсивный десятичный счетчик 2k дешифраторы 25 и 26, индикатор 27 действительСП
-U
СД СП
QD
315
но отработанного числа импульсов, индикатор 28 действительного перемещения объекта.
Импульсы датчика 8 частоты вращения поступают на реверсивный счетчик 9, из выхода которого результат в виде двоичного кода подается на один из входов сумматора-вычитателя 11, где вычитается из кода, который поступает от цифрокодового блока 10 задания перемещения гайки 2. Результат с выхода сумматора-вычитателя 11 подается на вход преобразователя 12 код-напряжение. Сигнал переноса из старшего разряда сумматора-вычитателя 11 управляет режимом работы реверсивного счетчика 9 (сложение, вычитание).
Если гайка 2, а соответственно, механизм 1 резания находятся в исход- ном положении и на выходе блока 10 присутствует определенный код, то счетчик 9 работает в режиме сложения и на выходе преобразователя 12 код- напряжение получаем сигнал положитель ной полярности, который усиливается усилителем 13 и через блок Т коммутации поступает на первый вход регулятора 7 скорости привода 6, который вращает винт k через редуктор 5 до тех пор, пока сигналы с выхода счетчика 9 и цифрокодового блока 10 заДания не сравняются, и на выходе сумматора получим нуль.
10
5
0 5
0
жет представлять собой источник отрицательного напряжения). Сигнал с блока 16 задания нулевого положения отрицательной полярности поступает на второй вход регулятора 7 скорости и секция резания возвращается в исходное состояние.
В имеющихся подобных устройствах на точность отработки задания на перемещение большое влияние имеет точность установки в исходном состоянии. В данном случае на точность работы устрой-г ства этот фактор не влияет. Это достигается за счет введения в устройство фотоэлектрического датчика 19, который устанавливается так, что при прохождении гайкой 2 нулевой точки зас лонка 3 перекрывает излучатель датчика 19, который работает, например в проходящем свете. Сигнал с выхода фотоэлектрического датчика 19 поступает на вход Сброс реверсивного счетчика 9 импульсов и одновременно на второй вход управляющего блока 17, при этом на его выходе А появляется сигнал низкого уровня, а на выходе В - высокого уровня. На блок 1k коммутации поступает сигнал с выхода В блока 17 на разрешение прохождения сигнала от усилителя 13 на вход регулятора 7 скорости, а сигнал с блока 16 задания нулевого положения отключается .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| Устройство компенсации постоянной составляющей фотоэлектрического датчика | 1981 |
|
SU960888A1 |
| Устройство контроля массы металла, прошедшего через вакуумкамеру при вакуумировании | 1990 |
|
SU1786114A1 |
| Устройство управления позиционированием | 1987 |
|
SU1462248A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Цифровая система регулирования электропривода | 1980 |
|
SU930246A1 |
| АДАПТИВНОЕ ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2517322C1 |
| Устройство позиционирования | 1990 |
|
SU1781673A1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ И ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2515215C1 |
Изобретение предназначено для изменения угла поворота механизма резания при изменении формата в процессе реза бумаги с рулона на листы листорезальных ротационных машин. Для этого в устройство введены фотоэлектрический датчик фиксации нулевого положения, блок задания нулевого положения, первый и второй блоки коммутации, управляющий блок, блок индикации. Кроме того, в устройство входит цифро-кодовый блок задания перемещения механизма резания, сумматор-вычитатель, импульсный датчик частоты вращения, реверсивный счетчик импульсов. Данное устройство позволяет повысить точность отработки задания, т.к. на перемещение не влияет точность установки в исходном состоянии. 3 ил.
После снятия напряжения питания
устройства гайка 2 и, соответственно, подвижный конец механизма 1 резания остановятся в любом положении, а счетчик 9 теряет истинное значение координаты. Поэтому при возобновлении работы устройства необходимо гайку 2 вернуть в исходное (нулевое) положение. Это осуществляется следующим образом. При нажатии кнопки 22 , Пуск которая может быть совмещена с кнопкой подачи питания на машину, на вход дифференцирующего элемента 18 подается напряжение питания устройства положительной полярности. С выхода дифференцирующего элемента 18 сигнал поступает на один из входов блока 17 управления и на его выходе В появляется сигнал низкого уровня, а на выходе А - сигнал высокого уровня, который дает команду на блок 15 коммутации о разрешении прохождения сигна- |ла от блока 16 задания нулевого положения механизма 1 резания (который мо
Поскольку на входе Сброс счетчика 9 импульсов присутствует сигнал высокого уровня от фотоэлектрического датчика 19, то на выходе его сигнал равен нулю, а так как на цифрокодовом блоке 10 задания перемещения набрано определенное значение, то на вход регулятора 7 скорости будет подаваться сигнал положительной полярности и соответственно пайка 2 начнет перемещаться вправо. Сигнал на входе Сброс счетчика 9 импульсов будет присутствовать до тех пор, пока гайка 2, а соответственно, подвижный конец механизма 1 резания не пересекут нулевую точку, если он по инерции при возврате в исходное положение остановился немного левее нулевой точки. При прохождении гайкой 2 нулевой точки сигнал на выходе датчика 19 исчезает и счетчик работает в режиме сложения, что обеспечивает точность отработки задания даже при остановке гайки 2 не точно в нулевом положении.
Если во время работы на машине меняется формат реза и необходимо повернуть механизм резания вправо от предыдущего положения, т.е. напротив хода бумажной ленты (фиг. 1), набирают на блоке 10 новое значение, которое соответствует требуемому формату, а одновременно и углу поворота резальной секции. На выходе суммато- ра-вычитателя 11 появляется сигнал разбаланса и двигатель поворотом червяка перемещает гайку 2 в заданное положение. Если необходимо повернуть механизм резания 1 влево по отношению к предыдущему положению, то, изменив соответственно набор на блоке 10, на выходе сумматора-вычитателя 11 получают код, который после преобразования в напряжение дает отрицательный сигнал и двигатель 6 начинает вращать винт k через редуктор 5 в обратном
20 управления позиционным приводом и при перемещениях больших в десятки раз, чем в данном конкретном случае, и с сохранением точности позиционирования без наращивания разрядности сумматора-вычитателя 11 и преобразователя 12 код-напряжение. Эта цель достигается тем, что в устройство введена кнопка 23 5г Стоп,которая соединена с входом дифференцирующего элемен25
направлении, а сигнал с выхода переноса старшего разряда сумматора устанавливает счетчик 9 импульсов в режим Вычитание, и винт вращается до тех пор, пока на выходе сумматора-вычитателя 11 не получают нулевой сигнал, т.е. пока не будет отработано задание. Сели же механизм резания по инер-30 та 21, сигнал с выхода которого пос- ции проскакивает точное значение по- тупает на второй вход управляющего зиционирования в любую из сторон, вле- блока 17 и одновременно на вход во или вправо от набранного значения на блоке 10, происходит автоматическое переключение режима работы реверсивно- Если очередная точка позициониро- го счетчика 9 импульсов,а соответст- вания выходит за пределы максимально- венно, и полярности сигнала, поступа- го перемещения данного поддиапазона ющего из преобразователя 12 код-напряжение через блоки 13 и 1k на регулятор
Сброс реверсивного счетчика 9 импульсов.
(фиг. 3) , которое можно осуществить при данном порядке разрядности блоков
7скорости.
На выходах А и В управляющего блока 17 появляются сигналы высокого уровня попеременно по переднему фронту подающегося сигнала на соответствующий вход, причем если на выходе А сигнал высокого уровня, то на выходе
8- низкого, и такая картина сохраняется до прихода сигнала на другой вход, тогда на выходе В появляется сигнал высокого уровня, на выходе А - нуль.
Для контроля за правильной и точной работой устройства служит блок 20 индикации. Импульсы от датчика 8 поступают на реверсивный счетчик 9 им пульсов и одновременно на счетчик 2ч, с выхода которого сигнал в виде кода подается на дешифраторы 25 и 26. Режимом работы счетчика 2k также управ
ляет сигнал переноса из старшего разряда сумматора-вычитателя 11. С выхода дешифратора 25 сигнал поступает на индикатор 27 действительно отработанного числа импульсов при вращении винта Ц, ас выхода дешифратора 26 пре образованный код поступает на индикатор 28 действительного перемещения
Q объекта, в предлагаемом устройстве механизма резания в миллиметрах, с точностью, например, до 0,01 мм. Точность перемещения зависит от дискретности датчика 8 и шага винта k (нап5 ример, если импульсный датчик 8 выдает 100 - 1000 имп./об и шаг винта 1 мм, точность позиционирования бу-i дет 0,01-0,001 мм).
Устройство можно использовать для
0 управления позиционным приводом и при перемещениях больших в десятки раз, чем в данном конкретном случае, и с сохранением точности позиционирования без наращивания разрядности сумматора-вычитателя 11 и преобразователя 12 код-напряжение. Эта цель достигается тем, что в устройство введена кнопка 23 5г Стоп,которая соединена с входом дифференцирующего элемен5
0 та 21, сигнал с выхода которого пос- тупает на второй вход управляющего блока 17 и одновременно на вход - Если очередная точка позициониро- вания выходит за пределы максимально- го перемещения данного поддиапазона
та 21, сигнал с выхода которого пос- тупает на второй вход управляющего блока 17 и одновременно на вход Если очередная точка позициониро- вания выходит за пределы максимально го перемещения данного поддиапазона
Сброс реверсивного счетчика 9 импульсов.
та 21, сигнал с выхода которого пос- тупает на второй вход управляющего блока 17 и одновременно на вход Если очередная точка позициониро- вания выходит за пределы максимально- го перемещения данного поддиапазона
(фиг. 3) , которое можно осуществить при данном порядке разрядности блоков
9-12, например 12 разрядов, то, нажимая кнопку 23 5 Стоп, подают импульс положительной полярности на вход Сброс счетчика 9 и второй вход .управляющего блока 17. Сигналы на вы- ходах блока 17 не меняются, счетчик 9 обнуляется и данная точка позиционирования становится нулевой, исходной точкой для следующего поддиапазона, от которой уже будет вестись отсчет дальше вправо и т.д.
Блок 20 индикации отражает суммарное количество импульсов, которые поступают за весь путь перемещения, и сам путь перемещения, выраженный в миллиметрах или сантиметрах в зависимости от необходимой точности.
Если же нужно очередную точку позиционирования задать такую, которая находится левее нулевой точки данно
го поддиапазона, т.е. при выставлении на блоке 10 кода О не достигнуто нужной точки, то нажимая кнопку 22
5,, воздействуют на первый вход управляющего блока 17, который открывает блок 1JJ коммутации, а блок
И коммутации закрывается, и сигнал,
который поступает от блока 16 на
вход регулятора 7 скорости двигателя
6,перемещает объект позиционирования влево. Контроль ведут по блоку индикации. При прохождении объектом требуемой точки нажимают кнопку 23 Стоп и точка, где остановится объект будет нулевой для поддиапазона, в который будет входить требуемая точка позиционирования. Имея на индикаторе действительнее перемещение объекта
по отношению к нулевой точке всего диапазона, можно определить, какое значение необходимо набрать на блоке 10, чтобы переместить объект в требуемую точку позиционирования.
Формула изобретения
Устройство для управления механизмом резания листорезальной машины, с0 держащее цифрокодовый блок задания перемещения механизма резания, выход которого соединен с первым входом сумматора-вычитателя, реверсивный счетчик импульсов, преобразователь код-напряжение, выходом подключенный к входу усилителя, двигатель, вал которого механически связан с импульсным датчиком частоты вращения, о тличающееся тем, что, с келью расширения области применения, повышения точности позиционирования и упрощения устройства, в него введены блок индикации, фотоэлектрический датчик фиксации нулевого положения, блок задания нулевого положения, первый и второй блоки коммутации, управляющий блок, кнопки Пуск и Стоп, которые через дифференцирующие элементы соединены соответственно с первым и вторым входами управляющего блока, первый выход которого подключен к управляющему входу первого коммутатора, второй выход - к управляющему входу второго коммутатора, информационный вход которого соединен с выходом усилителя, а выход - с первым входом электропривода, второй вход которого подключен к выходу первого коммутатора, информационный вход которого соединен с выходом блока задания нулевого положения, выход реверсивного счетчика импульсов соединен с вторым входом сум- матора-вычитателя, выход переноса . старшего разряда которого соединен с входом выбора режима работы реверсивного счетчика и с первым входом блока индикации, второй вход которого подключен к выходу импульсного датчика частоты вращения и к информационному входу реверсивного счетчика, вход сброса которого соединен с выходом фотоэлектрического датчика и с вторым входом управляющего блока, а информационный выходсумматора-вычитателя подключен к входу преобразователя код-напряжение.
11
Редактор С. Папп
ОЗиг.1
Составитель И. Швец
Техред М.Дидык Корректор Л. Патай
12
18
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
