Изобретение относится к обработке металлов резанием и может быть использовано в металлорежущих станках.
Цель изобретения - повышение производительности и обеспечение удобства обслуживания за счет устранения ручного механизма управления.
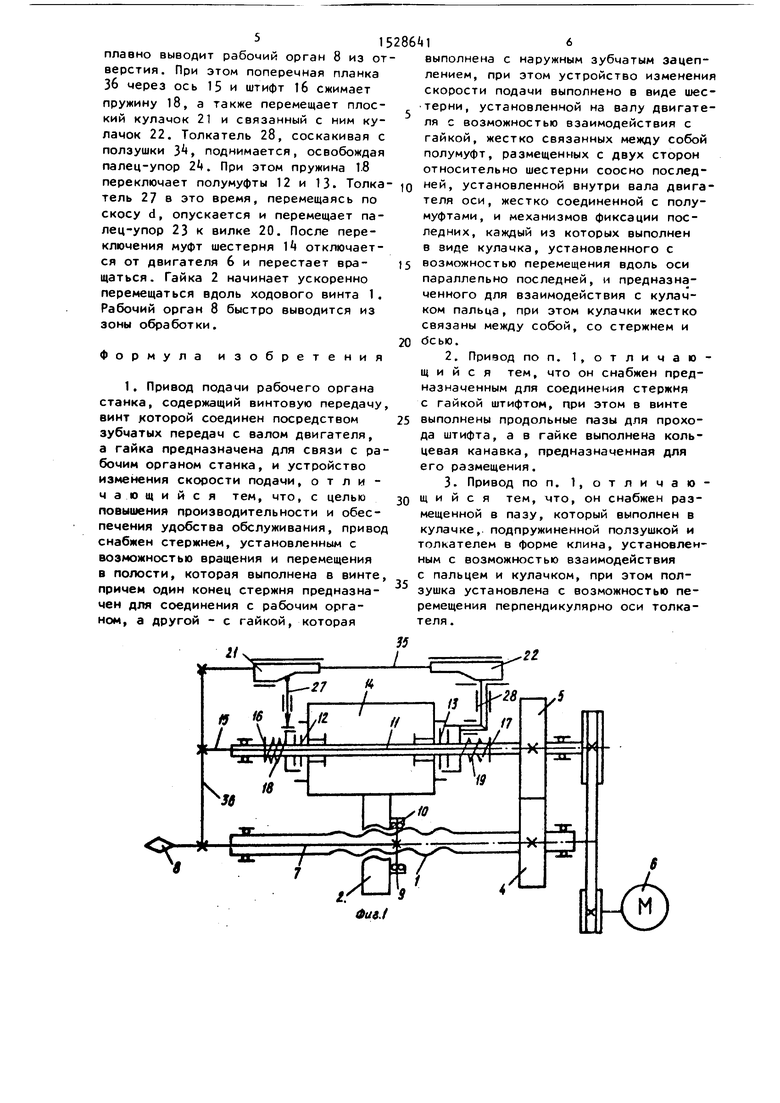
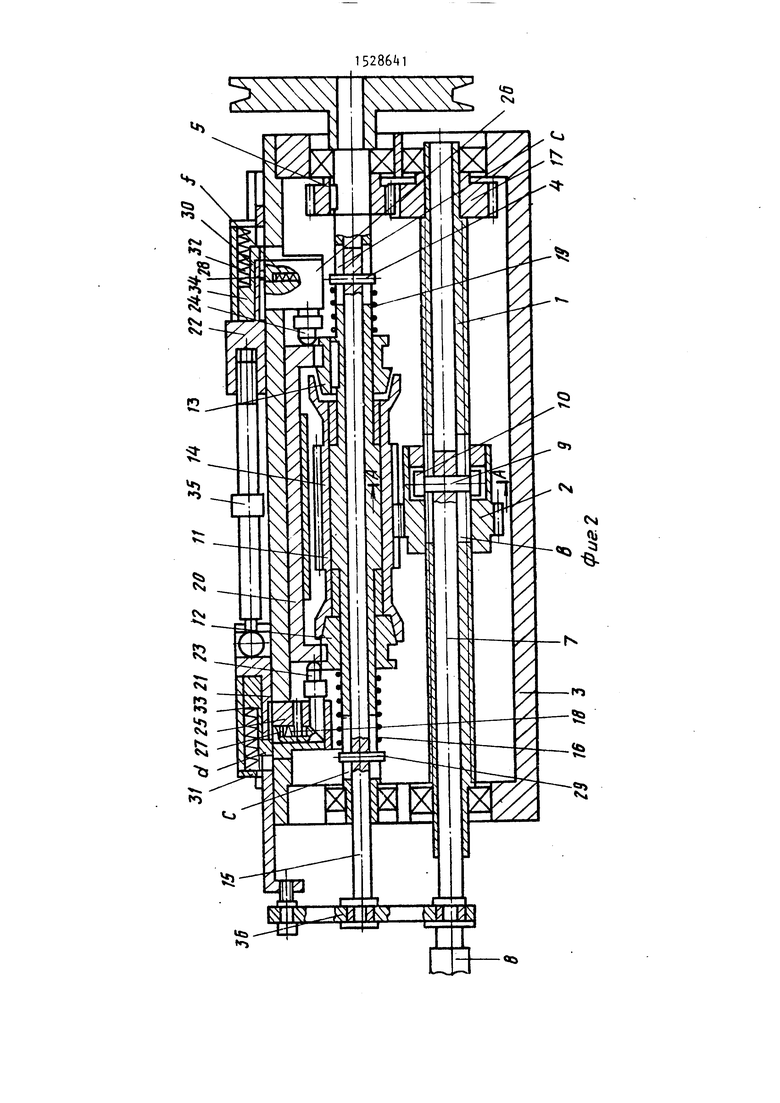
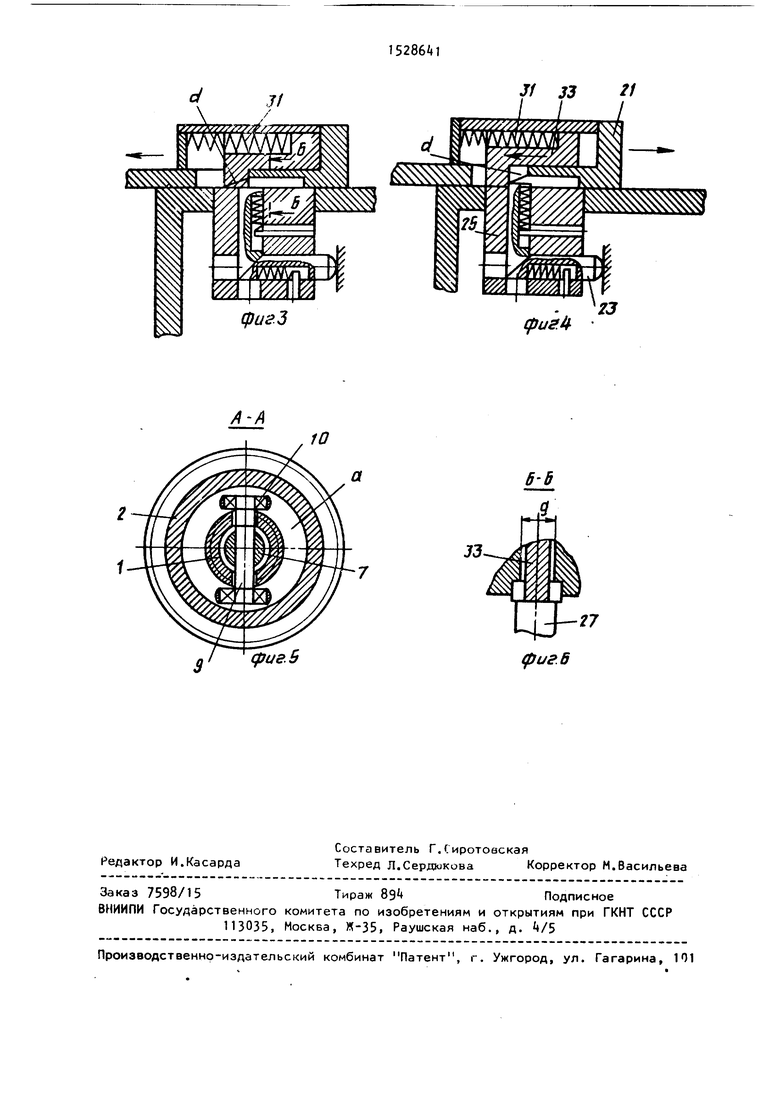
На фиг. 1 изображен привод подачи рабочего органа станка, кинематическая схема; на фиг. 2 - то же, продольный разрез; на фиг. 3 - механизм фиксации полумуфты; на фиг. i - то же, при отводе кулачка от ползушки; на фиг. 5 - разрез А-А на фиг. 2; на фиг. 6 - разрез Б-Б на фиг. 3.
Привод подачи рабочего органа станка содержит ходовой винт 1 с гайкой 2. Ходовой винт 1 установлен в станине 3 и через шестерни i и 5 связан с двигателем 6. Ходовой винт
1 выполнен полым и в нем установлен стержень 7. Один конец стержня 7 соединен с рабочим органом 8, а другой с гайкой 2. Для этого в стержне 7 запрессован штифт 9, концы которого закреплены в гайке 2. Для свободного вращения иг ифта 9 в гайке 2 выполнена кольцевая канавка а, имеющая обкатные ролики 10, мемаду которыми установлен штифт 9. Для обеспечения розможности осевого перемещения штиф : та 9 в стенках винта 1 выполнены диаметрально противоположные пазы Ъ, Гайка 2 выполнена с наружным зубчатым зацеплением.
На валу Т1 двигатели 6 между двумя конусными полумуфтами 12 и 13 установлена шестерня 1, входащая в зацепление с гайкой 2. Ответные части полумуфт J2 и 13 выполнены за цело
с шестерней 14. Внутри вала 11 уста
новлена с возможностью осевого перемещения ось 15. С обеих сторон полумуфт в оси 15 запрессованы штифты 1б и 17. Полумуфты 12 и 13 подпружинены относительно штифтов 1б и 17 пружинами 18 и 19. В корпусе вала 11 для свободного перемещения штифтов 1б и 17 выполнены пазы с. По;1умуфты 12 и 13 жестко соединены вилкой 20.
Каждая полумуфта снабжена механизмом фиксации, который выполнен из двух основных частей - установленного с возможностью перемещения вдоль оси вала плоского кулачка 21 (22) и взаимодействующего с ним пальца-упо- ра 23 (2М.
Пальцы-упоры 23 и 2 расположены с обеих сторон вилки 20 и направлены навстречу друг другу. Каждый из них установлен в корпусе 25 (2б) , закрепленном на станине 3, и взаимодейству с плоским кулачком 21 (22) через толкатель 27 (28), который поджат к ку- лачку 21 (22) пружиной 29 (30) . Контактирующие поверхности 27 (28) и пальца-упора 23 (2) выполнены в виде клиньев.
Плоский кулачок имеет профильную поверхность со скошенными участками d, f. В пазу g кулачка установлена с возможностью перемещения перпендикулярно оси толкателя 27 (28) подпружиненная пружиной 31 (32) ползушка 33 (З ), меняющая профиль кулачка 21( 22) (профиль с плавным скосом на ступенчатый); толкатель 27 (28) шире паза g.
Кулачки 21 и 22 соединены между собой горизонтальной тягой 35. Стержень 7. ось 15 и плоский кулачок 21 жестко соединены поперечирй планкой 36.
Устройство работает следующим образом.
В начальный момент работы правая полумуфта 13 выключена из сцепления с шестерней 1. Толкатель 27 находится в крайнем нижнем положении, а толкатель 28 - в крайнем верхнем по- .г1Ьжении. При включении двигателя 6 через шестерни i и 5 осуществляется вращение ходового .винта 1, которое
обеспечивает поступательное движение гайки 2. Последняя, в свою очередь, через штифт 9 и стержень 7 осуществляет быстрый подвод рабочего органа в зону обработки.
0
5
0
0
5
5
0
5
0
5
Одновременно со стержнем 7 перемещается влево поперечная планка 36, которая тянет за собой ось 15 со штифтами 1б и 17 и плоский кулачок 21, а также связанный с ним кулачок 22. При этом перемещение штифта 1б освобождает пружину 18, а штифт 17 сжимает пружину 19. Пальцы-упоры 23 и 2 удермивают полумуфты 12 и 13 в исходном положении до тех пор, пока не происходит изменение положения толкателей 27 и 28.
Кулачок 21, перемещаясь относительно толкателя 27, освобождает его в тот момент, когда последний выходит с.з контакта с ползушкой 33 (фиг. ). Соскакивая с ползушки 33 под действием пружины 29, толкатель 27 поднимается. Кулачок 22 в это же время опускает толкатель 28, который, отжимая ползушку З вправо, перемещает- ,ся по скосу f профильной поверхности кулачка 22. После выхода толкателя 28 со скоса f (когда он занимает крайнее нижнее положение) пружина 32 возвращает ползушку З в исходное положение.
Подъем толкателя 27 освобождает палец-упор 23; смещаясь влево, он перестает фиксировать вилку 20. При этом пружина 19, возаращаясь в исходное состояние, переключает полумуфты
12и 13. При этом резкое перемещение пальца упора 23 вследствие ступенчатой профильной поверхности кулачка 21 обеспечивает надежное переключение полумуфт (щелчком). Полумуфта
13входит в зацепление с шестерней И. При этом палец-упор 23, смещенный к вилке 20 при опускании толкателя 28, фиксирует ее в этом положении.
При сцеплении полумуфты 13 с шестерней Ц вращение от двигателя 6 передается шестерне 1Ц, которая, в свою очередь, находясь в зацеплении с гайкой 2, приводит ее во вращение, перемещая в направлении, обратном направлению перемещения гайки от ходового винта 1. Скорость продольного перемещения гайки 2 снижается - она равна разности скоростей перемещения гайки от ходового винта 1 и от шестерни И. В этот момент гайка 2 осуществляет микроподачу рабочего органа станка.
При реверсе двигателя 6 происходит обратный процесс. Гайка 2, медленно перемещаясь в обратном направлении.
г.
Фиг.
««S CSJ
| название | год | авторы | номер документа |
|---|---|---|---|
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Механизм обрезки нитей на швейной машине | 1980 |
|
SU962368A1 |
| Устройство для контроля жидкости в прозрачных ампулах | 1985 |
|
SU1453262A1 |
| ТОКАРНАЯ СИЛОВАЯ ГОЛОВКАт~—^~"I | 1972 |
|
SU346033A1 |
| Автомат для изготовления пружин | 1988 |
|
SU1595612A1 |
| Устройство для отбора пробы жидкости из резервуара | 1986 |
|
SU1364948A1 |
| Поворотно-делительный стол | 1982 |
|
SU1068263A1 |
| Автомат для маркирования деталей краской | 1981 |
|
SU1061879A1 |
| Устройство для обработки ленточного материала | 1988 |
|
SU1516199A1 |
| РЕВОЛЬВЕРНЫЙ СУППОРТ С ВЕРТИКАЛЬНОЙ ОСЬЮ РЕВОЛЬВЕРНОЙ ГОЛОВКИ | 1973 |
|
SU376177A1 |
Изобретение относится к области обработки металлов резанием и может быть использовано в металлорежущих станках. Цель изобретения - повышение производительности и обеспечение удобства обслуживания за счет устранения ручного механизма управления. Ходовой винт, установленный в станине, выполнен полым, и в нем установлен стержень, один конец которого соединен с рабочим органом, а другой при помощи штифта - с гайкой. Последняя выполнена с наружным зубчатым зацеплением. На валу между двумя конусными полумуфтами, подпружиненными относительно штифтов, установлена шестерня, входящая в зацепление с гайкой. Каждая полумуфта снабжена механизмом фиксации, выполненным из двух основных частей: установленного с возможностью перемещения вдоль оси вала плоского кулачка и взаимодействующего с ним пальца-упора. 2 з.п. ф-лы, 6 ил.
UJ
(рие.В
J/ 33
6-6
(риг. В
| Привод для перемещения подвижного органа станка | 1981 |
|
SU1115882A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| (З) ПРИВОД ПОДАЧИ РАБОЧЕГО ОРГАНА СТАНКА | |||
