Изобретение относится к машиностроению, а именно к захватным устройствам манипуляторов, роботов, обслуживающих станочное оборудование, например прессы.
Известен схват промышленного робота, содержащий корпус, губки, шарнирно прикрепленные к корпусу, привод перемещения губок, причем на корпусе схвата укреплен механизм досылки деталей в радиальном направлении, содержащий толкатель, шарнирно связанный с корпусом схвата и предназначенный также для захвата и транспортирования одной детали.
Наиболее близким к предлагаемому по технической сущности является захват манипулятора, содержащий корпус с захватными рычагами, копирным устройством и приводом, причем в корпусе выполнены пазы, а захватные рычаги снабжены опорами, помещенными в эти пазы, копирное устройство выполнено в виде охватывающей захватные рычаги и установленной с возможностью поворота вокруг продольной оси захвата обоймы, внутренняя поверхность которой представляет собой копир, а на поверхности захватных рычагов выполнены выступы, предназначенные для взаимодействия с этим копиром.
Недостатком известного захвата манипулятора является то, что он предназначен для захвата и транспортирования только одной детали.
Цель изобретения обеспечить одновременную установку закладных деталей в гнезда матрицы двухместной пресс-формы.
Для этого многопозиционное захватное устройство манипулятора, содержащее схват с корпусом и захватными рычагами, имеющими возможность взаимодействия с копиром, смонтированным на внутренней поверхности втулки, охватывающей захватные рычаги и имеющей возможность поворота от привода вокруг вертикальной оси схвата, при этом в кинематической цепи привода имеется зубчатая пара; снабжено смонтированным на руке манипулятора основанием и дополнительным схватом, а захватные рычаги каждого схвата снабжены губками в виде гофр из листового упругого материала, при этом копир каждого схвата выполнен из листового упругого материала и снабжен фиксаторами его положения относительно втулки, кроме того корпуса схватов смонтированы на основании, а зубчатая пара каждого схвата выполнена в виде зубчатой рейки, смонтированной на подвижном элементе привода и зубчатого венца, выполненного на наружной поверхности втулки.
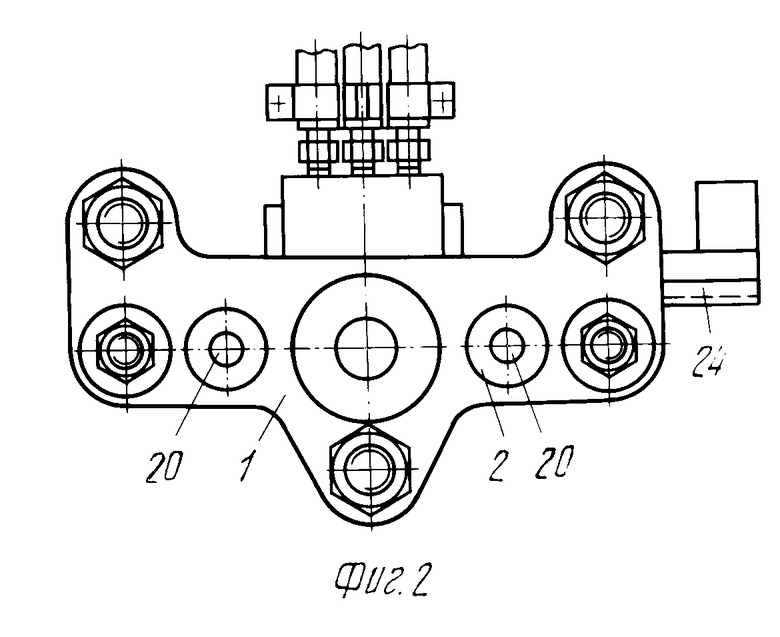
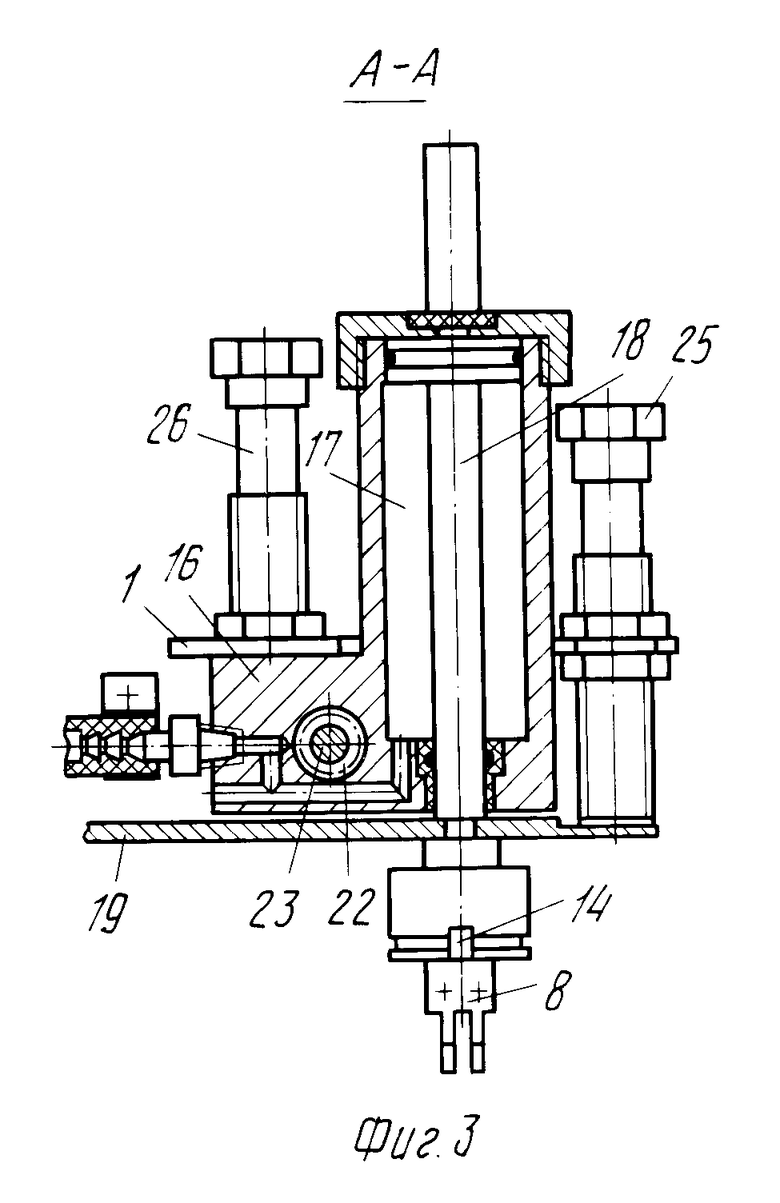
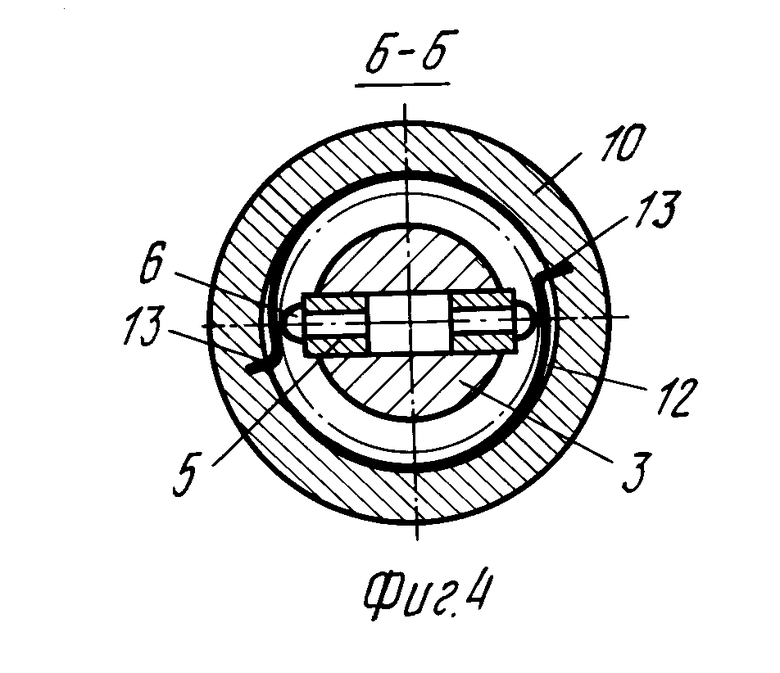
На фиг.1 изображен схват, вид сбоку; на фиг.2 то же, вид сверху; на фиг. 3 разрез А-А на фиг.1; на фиг.4 сечение Б-Б на фиг.1; на фиг.5 сечение В-В на фиг.1.
Многопозиционное захватное устройство манипулятора содержит основание 1, снабженное бобышками 2 и несущее жестко прикрепленные к нему корпусы 3. На каждом корпусе 3 установлены с возможностью качания на осях 4 захватные рычаги 5, несущие выступы 6, установленные над осью 4, и выступы 7, установленные ниже оси 4, а также губки 8, снабженные гофрами 9, выполненными из листового упругого материала.
На корпусе 3 установлены с возможностью вращения втулки 10, снабженные с наружной поверхности зубчатыми венцами 11, а с внутренней копирами 12, выполненными из листового упругого материала. Каждый копир 12 снабжен фиксатором 13, исключающим его вращение относительно втулки 10, и фиксатором 14, исключающим перемещение копира 12 вдоль вертикальной оси 15.
К основанию 1 прикреплен корпус 16 силового цилинда 17, шток 18 которого присоединен к руке 19 манипулятора (не показан).
Рука 19 снабжена направляющими колонками 20, а основание 1 подпружинено пружинами 21.
В корпусе 16 силового цилиндра 17 помещен силовой цилиндр 22, шток 23 которого несет зубчатые рейки 24, зацепляющиеся с зубчатыми венцами 11.
Для автоматического управления работой силового цилиндра 17 (предназначенного для опускания оcнования 1) используется бесконтактный торцовый выключатель 25, а для управления работой силового цилиндра 22, предназначенного для зажима-разжима транспортируемых деталей (не показаны) предусмотрены бесконтактные торцовые выключатели 26.
На чертежах показано многопозиционное захватное устройство с опущенным основанием 1 (пружины 21 сжаты). Захватные рычаги 5 сжаты. На чертеже не показаны питатель, периодически подающий закладные детали, и матрица пресс-формы.
Многопозиционное захватное устройство манипулятора работает следующим образом.
Исходное положение: при захвате закладных деталей захватные рычаги 5 разведены.
При работе силового цилиндра 17 основание 1 опускается на находящиеся на питателе (не показан) ориентированные закладные детали (не показаны). Силовой цилиндр 22 перемещается на зажим закладных деталей, вследствие чего втулки 10 получают вращательное движение вокруг оси 15.
При вращении втулок 10 копиры 12 также вращаются, вследствие чего выступы 6, расположенные под осью 4, скользят по поверхности копира 12, принуждая захватные рычаги поворачиваться вокруг оси 4, осуществляя зажим закладных деталей губками 8, после чего основание 1 поднимается в верхнее положение пружинами 21 и рука 19 поворачивается к матрице пресс-формы (не показана). Достигнув матрицы пресс-формы, силовой цилиндр 17 вступает в работу, вследствие чего основание 1 вновь опускается и закладные детали достигают гнезда матрицы, после чего срабатывает силовой цилиндр и зубчатые рейки 24, перемещаясь, поворачивают через зубчатые венцы 11 втулки 10 в противоположную сторону. Вследствие чего по поверхности копира 12 скользят уже выступы 7, принуждая захватные рычаги 5 поворачиваться вокруг оси 4, разжимая губками 8 закладные детали.
После чего вновь вступают в работу пружины 21, поднимая основание 1 в верхнее положение. Рука 19 возвращает многопозиционное захватное устройство в исходное положение.
Предлагаемое изобретение позволяет исключить ручной труд по установке закладных деталей в матрицы пресс-формы, что увеличивает производительность прессовых работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1979 |
|
SU806407A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Схват промышленного робота | 1988 |
|
SU1583287A2 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1984 |
|
SU1162534A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |

Использование: машиностроение, а именно схваты манипуляторов роботов, обслуживающих станочное оборудование, например прессы. Сущность изобретения: устройство содержит основание 1, несущее корпусы 3 схватов, на которых на осях 4 установлены захватные рычаги с выступами, установленными над осью 4, и выспупами, установленными ниже оси 4. Губки рычага снабжены гофрами 9. На корпусы 3 установлены с возможностью вращения втулки 10, снабженные с одной стороны зубчатыми венцами 11, а с другой - копирными устройствами, каждое из которых выполнено из упругого листового материала и снабжено фиксаторами. К основанию 1 приклеплен корпус силового цилиндра 17, шток которого присоединен к руке манипулятора. Рука снабжена направляющими колонками 20, а основание 1 подпружинено пружинами 21. Шток силового цилиндра несет рейки 24, зацепляющиеся с зубчатыми венцами 11. 5 ил.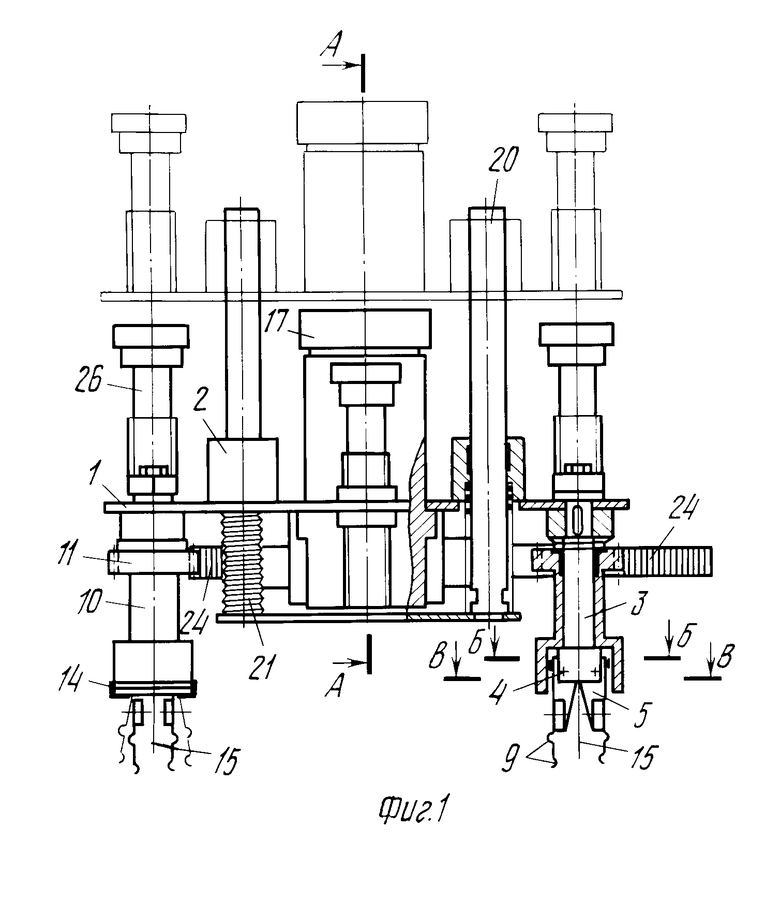
МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА, содержащее схват с корпусом и захватными рычагами, имеющими возможность взаимодействия с копиром, смонтированным на внутренней поверхности втулки, охватывающей захватные рычаги и имеющей возможность поворота от привода вокруг вертикальной оси схвата, при этом в кинематической цепи привода имеется зубчатая пара, отличающееся тем, что оно снабжено смонтированным на руке манипулятора основанием и дополнительным схватом, а захватные рычаги каждого схвата снабжены губками в виде гофр из листового упругого материала, при этом копир каждого схвата выполнен из листового упругого материала и снабжен фиксаторами его положения относительно втулки, кроме того корпуса схватов смонтированы на основании, а зубчатая пара каждого схвата выполнена в виде зубчатой рейки, смонтированной на подвижном элементе привода, и зубчатого венца, выполненного на наружной поверхности втулки.
| Захват манипулятора | 1979 |
|
SU806407A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
