1
(21)4396235/25-11
(22)22.03.88
(46) 23.12.89. Бюл. № 47
(71)Специальное проектно-конструкторское и технологическое бюро по промышленным электровозам Днепропетровского электровозостроительного завода
(72)Е. А. Москвичев и В. Р. Денисенко (53) 629.423.1(088.8)
(56) Авторское свидетельство СССР № 1219424, кл. В 60 L 5/16, 1984.
(54) ТОКОПРИЕМНИК-ПРОМЫШЛЕННОГО ЭЛЕКТРОВОЗА ДЛЯ БОКОВОГО ТОКОСЪЕМА
(57) Изобретение относится к электрифицированному железнодорожному транспорту, а более конкретно к электровозам с боковым токосъемом. Цель изобретения - повышение надежности. Токоприемник содержит полоз I, соединенный шарнирно с тягой 2, которая шарнирно соединена с основанием 3 механизма подъема и связана с ним пружиной 4. Основание 3 болтами 5 прикреплено к флан
| название | год | авторы | номер документа |
|---|---|---|---|
| Токоприемник для электрифицированного промышленного железнодорожного транспорта с боковым токосъемом | 1982 |
|
SU1102692A1 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2368513C1 |
| Токоприемник для транспортного средства | 1985 |
|
SU1283127A1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОЕЗДОВ | 2004 |
|
RU2272720C1 |
| Токоприемник железнодорожного транспортного средства с боковым токосъемом | 1981 |
|
SU994313A1 |
| Верхний узел токоприемника электровоза | 1981 |
|
SU1039754A1 |
| Токоприемник электроподвижного состава | 1984 |
|
SU1234247A1 |
| ФРЕЗЕРНО-СКРЕБКОВЫЙ ОЧИСТИТЕЛЬ ГОЛОЛЕДА НА КОНТАКТНОМ ПРОВОДЕ | 2024 |
|
RU2839204C1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2194631C2 |
| Способ управления токоприемным устройством вагона метро и токоприемное устройство для реализации способа | 2018 |
|
RU2701300C1 |
Изобретение относится к электрифицированному железнодорожному транспорту, а более конкретно к электровозам с боковым токосъемом. Цель изобретения - повышение надежности. Токоприемник содержит полоз 1, соединенный шарнирно с тягой 2, которая шарнирно соединена с основанием 3 механизма подъема и связана с ним пружиной 4. Основание 3 болтами 5 прикреплено к фланцу гайки 6 механизма поворота. Гайка 6 установлена в корпусе 7, прикрепленном болтами 8 к крышке 9 пневмоцилиндра 10, соединена с корпусом 7 шарнирно подшипниками 11 и многозаходной трапецеидальной резьбой с полым винтом 12, запрессованным в корпус 13, соединенный с корпусом 7 при помощи скользящей шпонки 14. Корпус 13 упирается через пружину 15 в поршень 16, который с помощью пружины 17 полым штоком 18 фиксирует корпус 13 с заданным зазором Δ, определяющим угол поворота гайки 6. Пружина 15 предварительно сжата усилием, обеспечивающим осевое усилие на полый винт 12 для поворота гайкой 6 основания 3 с тягой 2, полозом 1 и стяжкой 19 при подъеме токоприемника, а также амортизацию вращающихся масс при опускании токоприемника. Стяжка 19 шарнирно соединена с тягой 2 и полым штоком 18, а заплечик которого стяжка 19 упирается через упорную шайбу 20 и пружину 21. Пружина 21 предварительно сжата усилием, обеспечивающим удержание от перемещения вверх стяжки 19 до окончания перемещения полого винта 12 с корпусом 13 на величину заданного зазора Δ. Регулировка зазора Δ осуществляется с помощью отжимных винтов 22 и болтов 23, крепящих крышку 9 к пневмоцилиндру 10. Подпоршневая полость пневмоцилиндра 10 с пневматической магистралью сообщается через отверстие A. 1 ил.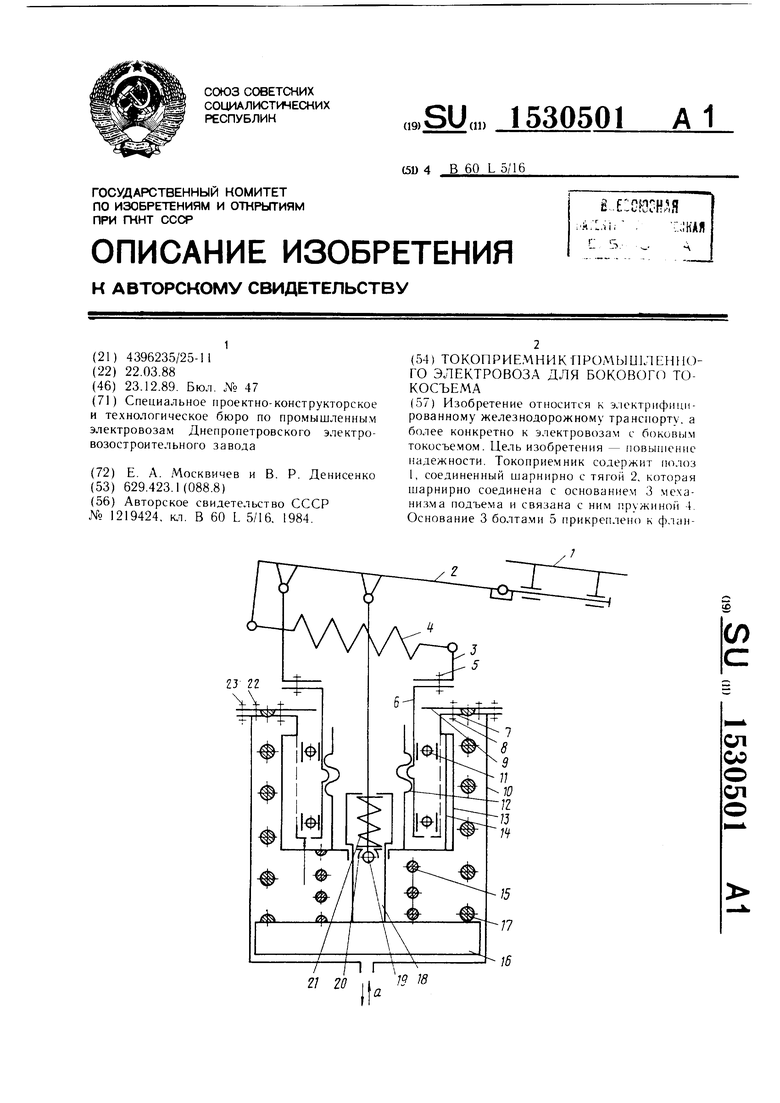
23 гг
21 20 ,1
(Л
СП
оо о ел
;5
ну lai iKH t) механизма поворота. Гайка 6 установлена в корпусе 7, прикрепленном болтами к крышке 9 нневмонилиндра 10, сое- дннена с корпусом 7 1нариирно подиишника- мн 11 и м ио1Ч)(П1 транецеида.тьной резьбой с полым винтом 12, запрессованным в корпус 13, соединенный с корпусом 7 при I10MOI1U1 скользящей ниюнки 14. Корпус 13 упирается через пружину 15 в 16,
KOlOpblii с помощью пружины 17 nO. IbIM 1ПТОко 1 18 фиксирует кориус 13 с заданным зазором д , (Л1реде,тяюп1,им угол поворота гайки 6. Пружина 15 предварительно сжата уси- . 1ием, ( беспечивакицим осевое усилие на полый винт 12 для поворота гайкой 6 основания 3 с тягой 2, полозом 1 и стяжкой И)
Изобретение относится к электрифицированному железнодорожному транспорту, а более конкретно к электровозам с боковым
ТОКОСТА МОМ.
Пе.чь изобретения - повькпение надежности.
На чертеже показана принципиальная кинематическая схема токоприемника.
Токоприемник содержит нолоз 1, соединенный щарнирпо с TKioii 2, которая щарнир- но соединена с основанием 3 механизма под ь- ема, и связана с ним пружиной 4. Основание 3 болтами Г) прикрс11. к фланпу гайки 6 ме.ханизма 11ово)ота. Гайка 6 установлена в корпусе 7, прикрс11,енном болтами 8 к крьнп- ке 9 ппевмоцп-тиндра 10. соединена с корпу- COV1 7 Hjapiinpiio 11одп1И1П1иками 11 и много- заходно) т 1апепеидальной резьбой с по.тым виптом 12, запрессованным в корпус 13, со(- диненный с корпусом 7 при помопш скользя- и1ей шпонки 14. Корпус 13 упирается через пружипу 15 в iiopnienb 16, который с помо- nU)K) пружины 17 полым штоком 18 фиксирует корпус lii с заданным зазором Д , онре- деляюшим угол поворота гайки 6. Пружина 15 нредварите.тьно сжата усилием, обеспечивающим осевое уси.1ие на полый винт 12 для поворота ()й 6 основания 3 с тягой 2, ii(),i()3uM 1 и стяжко11 19 при подъеме го- коприемника, а гакже амортизацию вращаю- HUixcH масс узлов п)и опускании токоприем- пика. (.тяжка 19 шарнирно соединена с тя- I oii 2 и полым 1ПГОКОМ 18, в заплечик кото- poi o стяжка И) упи)ается через упорную шайбу 20 и пружину 21.
Пружина 21 предварительно сжата усилием, обеспечивающим удержание от пере- ме1цепия вверх стяжки 19 до окончания пе- ремеп1ения полого винта 12 с корпусом 115 па величину заданного зазора Д .
Регчлировка зазора Л осуществляется с помощью отжимных винтов 22 и батгов 23,
при подъеме токоприемника, а также амортизацию врап1аю1ци.хся масс при опускании токоприемника. Стяжка 19 шарнирно соеди- пепа с тягой 2 и натым штоком 18, в заплечик которого стяжка 19 упирается через упорную Н1айбу 20 и пружину 21. Пружина 21 предварительно сжата усилием, обеспечивающим удержание от перемещения вверх стяжки 19 до окончания перемещения юлого винта 12 с корпусом 13 на величину заданного зазора д . Регулировка зазораД осуществляется с помощью отжимных вин- IOB 22 и болтов 23, крепящих крыщку 9 к пневмоцилиндру 10. Подпорщневая полость пневмоцилиндра 10 с пневматической магистралью сообщаелся через отверстие а. 1 ил.
5
О 5 0
5
0
кренящих крьипку 9 к пневмоцилиндру 10.
Поднор1нневая полость пнев.моцилиндра 10 с пневматической магистралью сообщается через отверстие а.
Токоприемник работает следующим образом .
При нодаче сжатого воздуха в пневмо- цилиндр 10 HOpHieHb 16, сжимая пружину 17, вместе со UITOKOM 18 перемещается вверх, освобождая корпус 13. Одновременно нод действием пружины 15 неремещаются в осевом направлении вверх полый винт 12 с кор- нусом 13. удерживаемые от новорота скользящей ниюнкой 14, на величину заданного зазора до упора в торцы гайки 6 и корпуса 7, поворачивая гайку 6 и соединенные с ней через основание 3 тягу 2, нолоз 1 и стяжку 19 на угол, соответствующий заданному зазору Л . При этом пружина 21 удерживает стяжкой 19 тя1у 2 от подъема.
После упора корпусом 13 в торцы гайки 1) и корпуса 7 пружина 15 будет сжиматься порп1нем 16, а полый шток 18 освободит через стяжку 19 тягу 2 с гюлозом 1, которые пружина 4 поднимает вверх в рабочее положение.
При В()1пуске сжатого воздуха или аварийной ei o утечке из пневмоцилиндра под воздействием пружин 15 и 17 произойдет полное опускание тяги 2 с полозом 1, а пос- .ле ущфания пологе; 18 в корпус 13 под воздействием пружины 17 - осевое пе- ремепгепие на заданный зазор Д полого винта 12 с корпусом 13 и соответствующий этому перемещению угол новорота гайки 6 с основанием 3, тягой 2 и нолозом 1.
Формула изобретения
Токоприе.мник промышленного электровоза для бокового токосъема, содержащий
полоз, закреп,тепнын на одном конце тяги,
другой конец которой связан с механизмом
1530501
56
подъема и механизмом поворота тяги в го-линдра винтовой пары, винт которой выполризонтальной плоскости с пневмоцилиндром,иен полым и подпружинен относительно поротличающийся тем, что, с целью повышенияшня пневмоцилиндра, шток которого выполнадежности, механизм поворота тяги выпол-нен также полым и связан через пружину с
йен в виде размешенной внутри пневмоци-5 тягой.