рие/
Изобретение относится к измерительной технике и может быть исполь- зовано, например, в трехкоординатных топопривязчиках, высотомерах-автоматах, профилографах и других устройствах, установленных на транспортных средствах и предназначенных для автоматического определения профиля или высоты местности вдоль маршрута движения относительно высоты начальной точки маршрута.
Целью изобретения является повышение точности измерений.
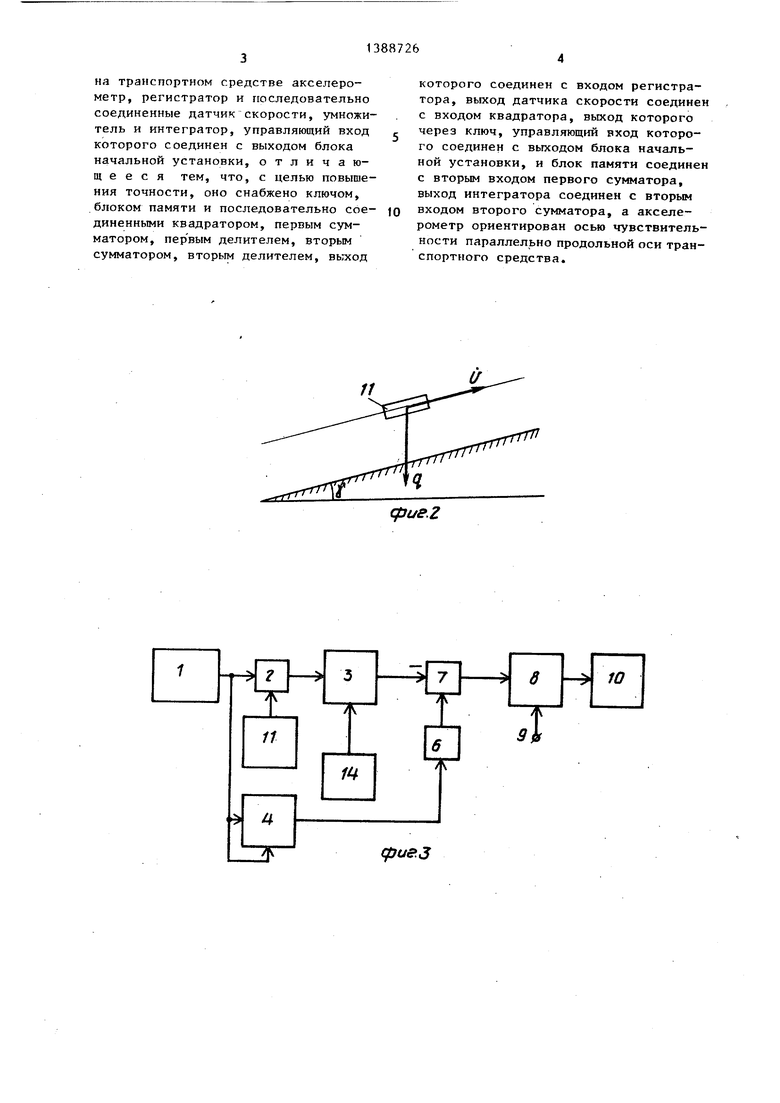
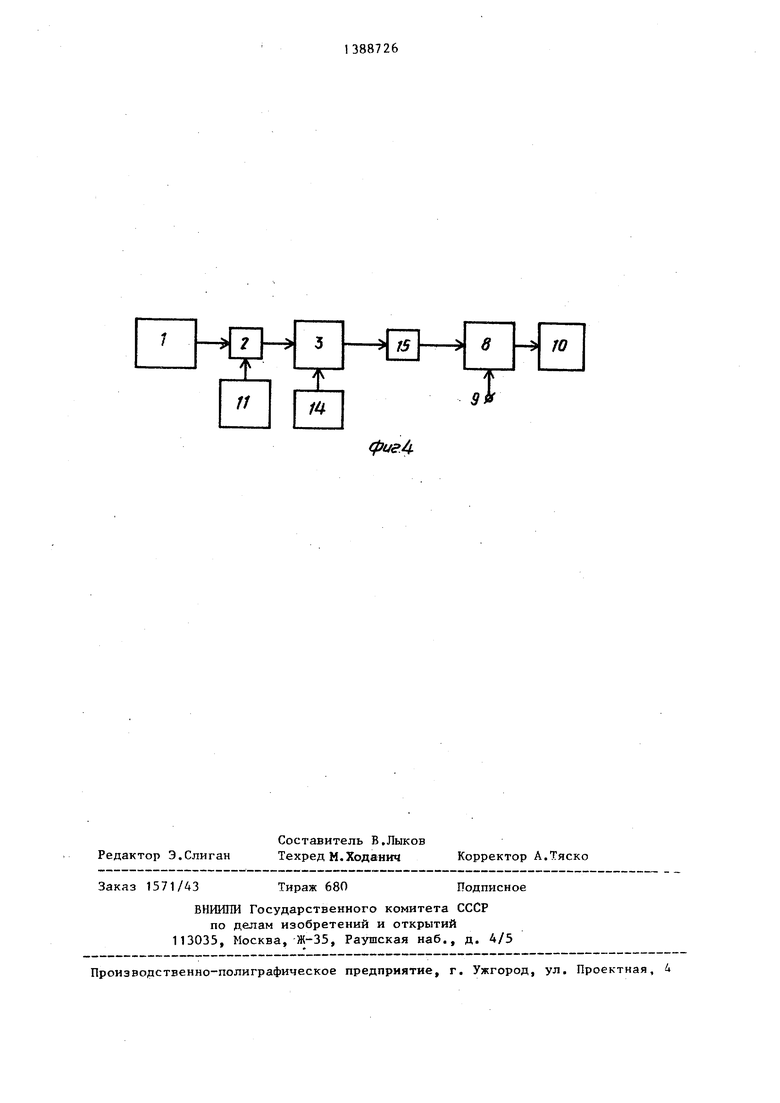
На фиг.1 приведена структурная схема предлагаемого устройства; на фиг.2 - схема ускорений, воздействующих на акселерометр; на фиг.З - схема движения с остановкой на начальной точке, вариант; на фиг.4 - то же, с остановкой на конечной точке.
Устройство содержит последовательно включенные датчик 1 скорости, умножитель 2 и интегратор 3, а также последовательно включенные квадратор 4, первый сумматор 5, блок 6 деления на 2 (масштабньм коэффициент) второй сумматор 7, блок 8 деления на g, второй вход 9 которого соединен с шиной 9 сигнала ускорения силы тяжести g, а выход - с регистратором 10. Устройство содержит также акселерометр 11, выход которого подключен к второму входу умножителя 2. Ось чувствительности акселерометра 11 параллельна основанию транспортного средства в продольном направлении. Вход квадратора 4 соединен с выходом датчика 1 скорости, а выход
н
1/V2-V2 -(
X-Vdt -(( )Vdt- . rJ
t о
sinTf.Vdt
- J
a Vdt).
где V - скорость в текущий момент; v - скорость в начальный момент.
10 В начальный момент сигналом начальной установки по цепи 14 интегратор 3 подготавливается к работе, а ключ 12 замыкается, и в блоке 13 памяти фиксируется значение квадрат
15 начальной скорости V. Одновременно по цепи 9 поступает значение g. Пос ле окончания действия сигнала начал ной установки на вход интегратора 3 с выхода умножителя 2 поступает про
20 изведение aV, формируемое по сигналам датчика 1 скорости и акселерометра 11.
Вычисленное значение интеграла поступает на вычитающий вход второг
25 сумматора 7, на суммирующий вход ко торого подается поправка ().
При этом величина V берется с выход квадратора 4, а V| - с блока 13 пам
30 ти. После деления результата на g в блоке 8 деления на его выходе получаем значение относительной высоты Н, которое вьщается на регистратор 10.
35 Для широкого распространенного
случая, когда каждый раз Vo О (дв жение начинается после остановки транспортного средства на начальной
точке), устройство может быть упрочерез последовательно включенные щено: из него исключаются ключ 12, 12 и блок 13 памяти - к вычитающему входу первого сумматора 5. Управляющие входы ключа 12 и интегратора 3 соединены с блоком 14 начальной установки, а выход интегратора 3-е . вычитающим входом второго сумматора 7.
Устройство работает следующим образом.
блок 13 памяти и первый сумматор 5, а выход квадратора 4 подключен непосредственно к входу блока 6 деления на 2 (фиг.З).
Если же при этом достаточно знать только высоту конечной точки маршрута,.на которой транспортное средство также останавливается ( из устройства можно дополнительно и ключить квадратор 4, блок 6 деления и второй сумматор 7, на выход интег ратора 3 через инвертор 15 подключить к входу блока 8 деления на g (фиг.4),
В движении с акселерометра мается сигнал (фиг.2):
11 сниа V gsiny
где V - продольное ускорение портного средства. Отсюда
.
siny - (V - а).
-(( )Vdt- rJ
о
Vdt).
где V - скорость в текущий момент; v - скорость в начальный момент.
В начальный момент сигналом начальной установки по цепи 14 интегратор 3 подготавливается к работе, а ключ 12 замыкается, и в блоке 13 памяти фиксируется значение квадрата
начальной скорости V. Одновременно по цепи 9 поступает значение g. После окончания действия сигнала начальной установки на вход интегратора 3 с выхода умножителя 2 поступает произведение aV, формируемое по сигналам датчика 1 скорости и акселерометра 11.
Вычисленное значение интеграла поступает на вычитающий вход второго
сумматора 7, на суммирующий вход которого подается поправка ().
При этом величина V берется с выхода квадратора 4, а V| - с блока 13 памяти. После деления результата на g в блоке 8 деления на его выходе получаем значение относительной высоты Н, которое вьщается на регистратор 10.
Для широкого распространенного
случая, когда каждый раз Vo О (движение начинается после остановки транспортного средства на начальной
щено: из него исключаются ключ 12,
блок 13 памяти и первый сумматор 5, а выход квадратора 4 подключен непосредственно к входу блока 6 деления на 2 (фиг.З).
Если же при этом достаточно знать только высоту конечной точки маршрута,.на которой транспортное средство также останавливается () из устройства можно дополнительно исключить квадратор 4, блок 6 деления и второй сумматор 7, на выход интегратора 3 через инвертор 15 подключить к входу блока 8 деления на g (фиг.4),
Формула изобретения
Устройство для автоматического ни- ве лирования, содержащее закреплен)ые
на транспортном средстве акселерометр, регистратор и последовательно соединенные датчик скорости, умножитель и интегратор, управляющий вход которого соединен с выходом блока начальной установки, о т л и ч а ю- щ е е с я тем, что, с целью повышения точности, оно снабжено ключом, блоком памяти и последовательно соединенными квадратором, первым сумматором, пер вым делителем, вторым сумматором, вторым делителем, выход
которого соединен с входом регистратора, выход датчика скорости соединен с входом квадратора, выход которого через ключ, управляющий вход которого соединен с выходом блока начальной установки, и блок памяти соединен с вторым входом первого сумматора, выход интегратора соединен с вторым входом второго сумматора, а акселерометр ориентирован осью чувствительности параллельно продольной оси транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения рельефа местности | 1986 |
|
SU1530897A1 |
| Способ измерения частоты и амплитуды морских ветровых волн | 1991 |
|
SU1812429A1 |
| Инерциальный волнограф | 1988 |
|
SU1696865A1 |
| Устройство для определения положения основания транспортного средства относительно земной поверхности | 1991 |
|
SU1812425A1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЯ С ПРЕПЯТСТВИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429505C1 |
| Устройство для контроля жесткости наматываемого материала | 1984 |
|
SU1285369A1 |
| Генератор случайных чисел | 1983 |
|
SU1099319A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
Изобретение относится к измерительной технике. Цель изобретения - повышение точности измерений. Сигналом начальной установки блока 14 интегратор 3. подготавливается к работе, ключ 12 замыкается. В блоке 13 памяти фиксируется значение квадрата начальной скорости. Одновременно со входа 9 поступает значение ускорения силы тяжести. На вход интегратора 3 с выхода умножителя 2 поступает произведение двух величин, формируемое по сигналам датчика 1 скорости и акселерометра 11. На выходе блока деления 8 получаем значение относительной высоты, которое вьщается на регистратор 10. 4 ил. СО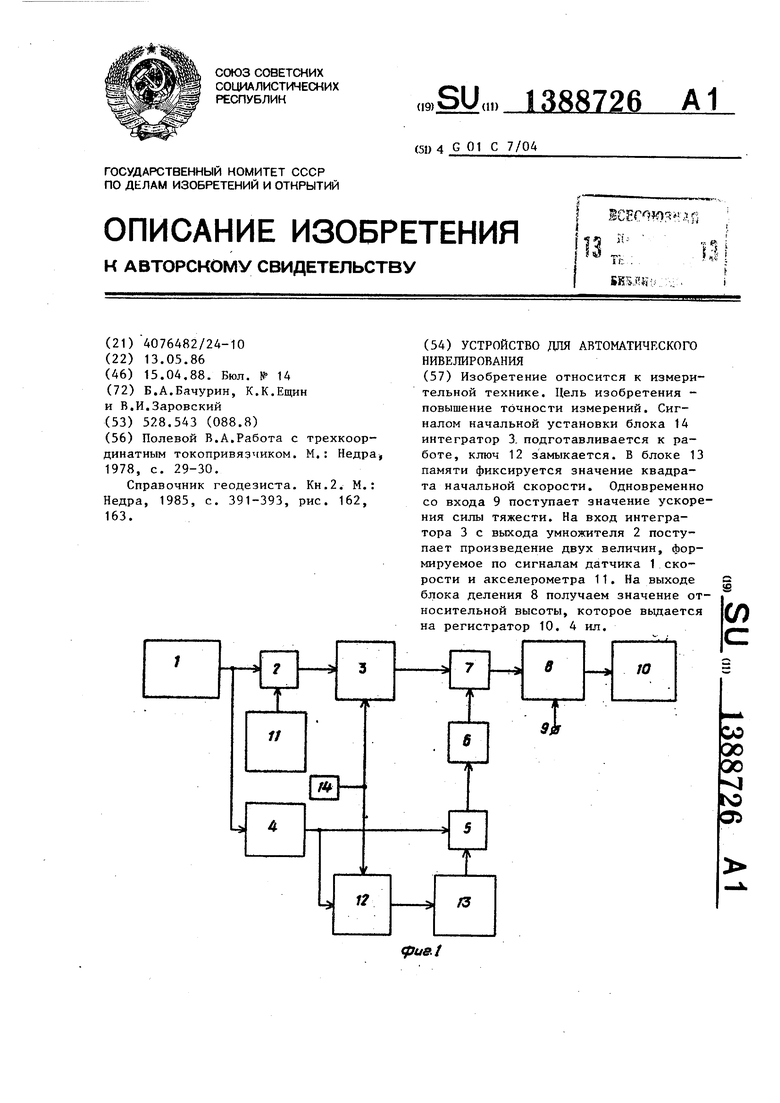
срие.г
(pt/гЛ
| Полевой В.А.Работа с трехкоординатным токопривяэчиком | |||
| М.: Недра, 1978, с | |||
| Солесос | 1922 |
|
SU29A1 |
| Справочник геодезиста | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: Недра, 1985, с | |||
| Ситценабивная машина | 1922 |
|
SU391A1 |
| Деревянное стыковое скрепление | 1920 |
|
SU162A1 |
