31 9
39
35
Изобретение относится к обработке еталлов давлением, точнее к устройствам для правки листов,
Цель изобретеьгая - повьппение автоматизации процесса,
На чертеже показана кинематическая схема машины,
Листоправильная машина содержит станину 1 с нижш1ми правильными ролиами 2 и подающим роликом 3| верхнюю раверсу 4 с верхними правильными роиками 5 и подающим роликом 6, смон- ированным в подпружиненной подушке 7, Траверса опирается на пружины 8, с боков защемлена четырьмя рядами шариков 9, размещенных в желобах траверсы и опор 10, Правая опора 10 выступом опирается на жесткий упор 11, а левая - на подпружиненный упор 12. Сверху траверса прижата пневмодвига- телями 13 и 14 через рычаги 15 и 16. Плечи 17 и 18 рычагов через подпружиненные штоки 19 и 20 действуют на заслонки 21 и 22 и сопла датчиков 23 и 24, Последние гибкими трубопроводами соединены с камерами 25 и 26 отрицательной обратной связи, входящими в конструкцию позиционеров 27 и 28. иафрагмы 29 и 30 позиционеров связаны с соплами датчиков 23 и 24 и отжимаются кверху пружинами 31 и 32, Камеры управления 33 и 34 позиционеров 27 и 28 связаны трубопроводами с пневматическими усилителями 35 и 36. Камеры 25 и 26 связаны с выходом позиционеров дросселями 37 и 38. Камеры 39 и 40 позиционеров с установленными в них пружинами 31 и 32 сообщены с атмосферой, а через сопла 41 и 42- с камерами 25 и 26, Пружины 31 и 32 через сопла 41 и 42, штоки 43 и 44 действуют на клапаны 45 и 46, которые разделяют выходное давление позиционера с давлением питания,
Подпружиненная подушка 7 через тягу 47,подпружиненную двуплечим рычагом 48,связана с соплом датчика 49,которое трубопроводами связано с делителем потока 50 и регулируемым дросселем 51, Выход делителя потока 50 каналом соединен с положительной камерой усилителя 36, а вход дросселя 51 - с источником питания воздухом.
Машина работает следующим образом.
При отсутствии давления воздуха в пневмодвигателях 13 и 14 траверса 4 пружинами 8 отжимает кверху, образуя пои этом максимальный раствор
0
5
0
5
0
5
0
5
0
5
между нижними роликами 2, 3 и верхними роликами 5, 6, При помощи тяги 47, рычага 48 сопло датчика 49 полностью перекрыто, а сопла датчиков 23 и 24 позиционеров 27 и 28 открыты пружинами 31 и 32 и диафрагмами 29 и 30,
Поскольку сопло датчика 49 перекрыто, то при подаче давления воздуха в систему на выходе усилителей 35 и 36, позиционеров 27 и 28 и пневмодвигателях 13 и 14 окажется максимальное давление воздуха. Пневмодвигатели 13 и Г4 через рычаги 15 и 16 сжимают пружины 8 и опускают траверсу 4, При наличии между подающими и правильными роликами обрабатываемой полосы, сопло датчика 49 откроется на величину зазора, пропорциональную толщине обрабатываемой полосы, который определяет давление воздуха на выходе датчика 49 и далее усилителей 35 и 36, в камерах 33 и 34 позиционеров 27 и 28, Полученное таким образом давление воздуха в камерах 33 и 34 сожмет на определенную величину пружины 31 и 32 и опустит сопла датчиков 23 и 24. Установленные сопла датчиков 23 и 24 определяют положение траверсы 4. Это происходит потому, что от их перекрытия зависит давление на выходе позиционеров 27 и 28 и в камерах пневмодвигйтеля 13 и 14, При открытых соплах датчиков 23 и 24 давление в камерах 25 и 26 понижается, что способствует с помощью пружин 31 и 32 открытию клапанов 45 и 46, следовательно, увеличению давления воздуха на выходе позиционеров 27 и 28 и в камерах пневмодвигателей I3 и 14. С увеличеш1ем давления в пневмодвигателях опускаются рычаги 15 и 16, а их плечи 17 и 18 с помощью штоков 19 и 20 и заслонок 21 и 22 перекрывают сопла датчиков 23 и 24, Перекрытие сопел датчиков 23 и 24 вызывает повышение давления в камерах 25 и 26 и перекрытие клапанов 45 и 46, что снижает давление на выходе позиционеров 27 и 28 и в камерах пневмодвигателей 13 и 14, В конечном результате устанавливается равновесное состояние.
Таким образом, положение траверсы зависит только от положения датчиков 23 и 24 и не зависит от усилий со стороны обрабатываемс полосы, которые с увеличением толщины увеличиваются.
5
а с уменьшением толщины - уменьшаются. Таким образом, положение траверсы 4 определяется настройкой датчика 49 и дросселя 51, а наклон ее - настройкой делителя потока 50, который повышает давление воздуха на выходе усилителя 36 по сравнению с усилителем 35, чем устанавливается сопло датчика 24 ниже сопла датчика 23 н, следовательно, увеличение раствора правильных роликов 2 и 5 на выходе обрабатываемой полосы.
Подпружиненный упор 12 постоянно выбирает зазор в направляющих при наклоне траверсы 4. Постоянный контакт подающих роликов 3 и 6 с обрабатываемой полосой позволяет осуществлять постоянный контроль ее толщины с помощью датчика 49, автоматическую установку траверсы 4 в нужное положение, при этом реакция усилий от обрабатываемой полосы, зависящих от многих факторов (коробоватосгь ,йс- ходный радиус, жесткость материала и др.J, автоматически уравновешивается усилиями от пневмодвигателей 13 и 14.
Изобретение при его использовании позволяет осуществлять автоматическую настройку машины независимо от толщины выплаапяемого листа.
Формула изобретения
Листоправильная машина, содержащая установленные на станине нижние подающий и правильные ролики, траверсу с верхними правильными роликами, подпружиненную подушку с верхним по- роликом, механизм регулировани раствора между верхними и нижними роликами в виде размещенных по краям траверсы двух толкателей, каждь1й из которых связан с приводом его переме10
21
Q
15
20
5
35
0
45
166
щения, и привод врацения роликов, причем траверса установлена с возможностью вертикального перемещения и поворота и подпружинена к толкателям, о т- личающаяся тем, что, с целью повышения автоматизации, машина снабжена двумя шарнирно установленными на станине двуплечими рычагами и системой управления приводами перемещения толкателей, привод перемещения каждого толкателя выполнен в виде пневмо- двигателя, а каждый толкатель смонтирован на одном из плеч рычага, свободный конец которого подпружинен к штоку пневмодвигателя при помощи пружины, установленной на втором плече рычага, система управления выполнена в виде установленных на станине н связанных с магистралью сжатого воздуха регулируемого дросселя, подключеиных |с нему двух позиционеров, двух усилителей, дополиитепьногЬ двуплечего рычага, шарнирио укрепленного на станине, одно из плеч которого подпружинено, делителя потока и датчика в виде сопла и заслонки, смонтированной на подпружиненом плече дополнительного рычага, второе плечо которого шар- mipHO связано с подушкой верхнего по- дагадего ролика, при этом каждый позиционер соединен с пневмодвигателем и выполнен в виде регулятора давления с дополнительным датчиком в виде сопла и заслонки, смонтированной на втором плече соответствующего ей основного рычага, камеры управления регулятора с диафрагмой, связанного с ней второго дополнительного датчика камеры отрицательной обратной связи, соединенной с камерой управления, связанной с выходом усилителя, а основной датчик соединен непосредственно с камерами усилителей и дополнительно с одним из усилителей через делитель потока.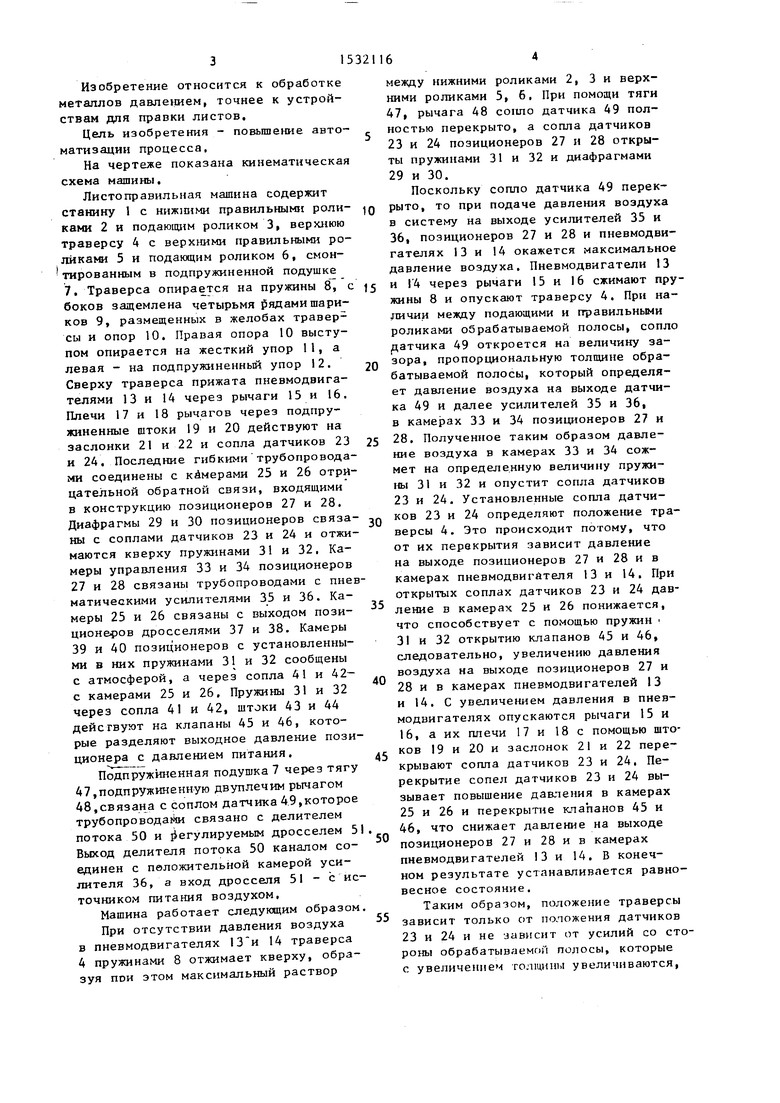

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для рифления прокатных валков | 1987 |
|
SU1494997A2 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2574649C2 |
| Пневмопривод прерывистого вращательного движения | 1982 |
|
SU1092309A1 |
| Устройство для определения листовых заготовок от стопы и подачи их в пресс | 1984 |
|
SU1183254A1 |
| Пневматический пресс для влажно-тепловой обработки деталей одежды | 1955 |
|
SU109595A1 |
| Пневмогидравлический следящий привод | 1989 |
|
SU1682640A1 |
| Устройство для разматывания ленточного материала из рулона и подачи его в зону обработки | 1988 |
|
SU1563815A1 |
| Станок для продораживания коллекторов электрических машин | 1974 |
|
SU555477A1 |
| ГИСТЕРОТУБАТОР | 1971 |
|
SU300190A1 |
| Полуавтоматический гладильный пресс | 1954 |
|
SU100244A1 |
Изобретение относится к обработке металлов давлением, а именно к устройствам для правки листов. Цель изобретения - повышение автоматизации. Машина содержит стационарные нижние правильные 2 и подающий 3 ролики и смонтированную на станине 1 с возможностью вертикального перемещения и поворота траверсу (Т) 4. На Т 4 установлены верхние правильные 5 и подающий 6 ролики. Последний смонтирован в подпружиненной подушке 7. Т 4 связана системой рычагов 15 и 16 с штоками пневмодвигателей 13 и 14, которые управляются позиционерами 27 и 28 с датчиками в виде сопл (С) 23 и 24 и заслонок 21 и 22 через усилители 35 и 36, связанные с магистралью сжатого воздуха через дроссель 51 и датчик 49, кинематически связанный с подушкой 7. Усилитель 36 дополнительно соединен с магистралью через делитель 50 потока. Наклонная настройка Т 4 с роликами осуществляется соответствующей величиной перемещения штоков пневмодвигателей, задается регулировкой давления позиционерами 27 и 28 через усилители 35 и 36 и регулируется путем перемещения С 23 и 24 относительно заслонок 21 и 22. Угол наклона регулируется настройкой делителя 50. В зависимости от толщины выправляемого листа увеличивается или уменьшается зазор между С и заслонкой датчика 49 и соответственно уменьшается или увеличивается давление во всей системе до пневмодвигателей 13 и 14, и при этом Т параллельно поднимается или опускается. 1 ил.
| Слоним А.З., Сонин Л,Л., Правка листового и сортового металла.-М,: Металлургия, , с | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |
