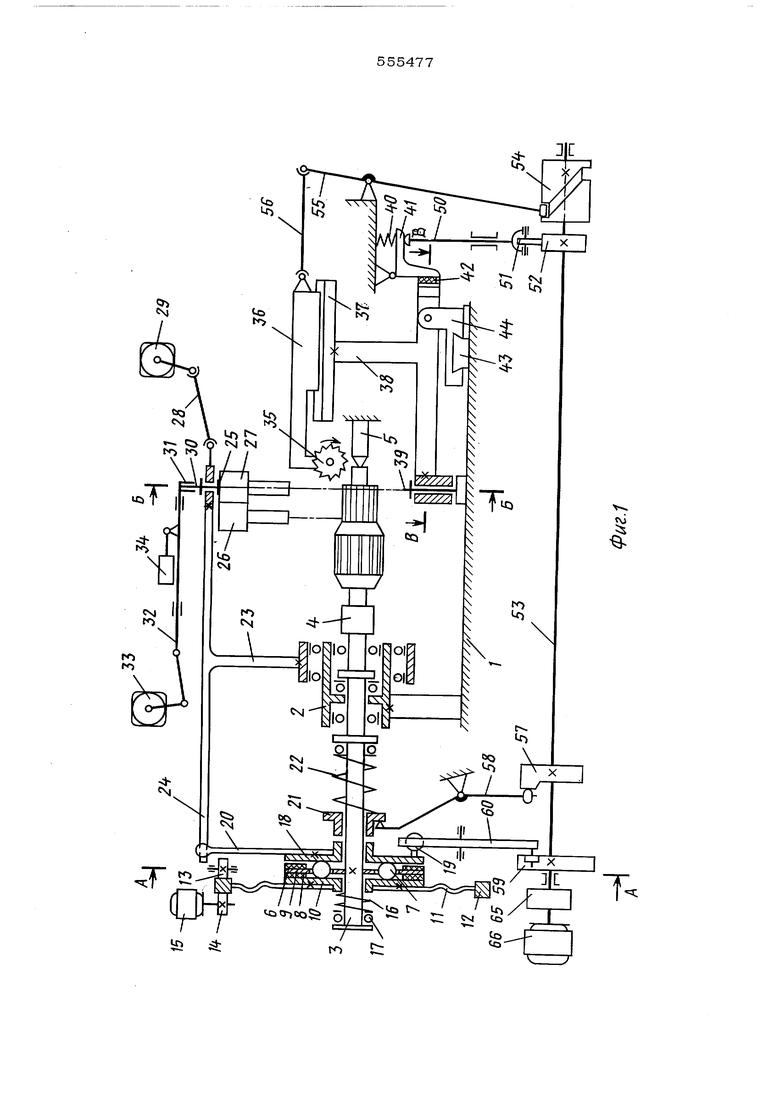
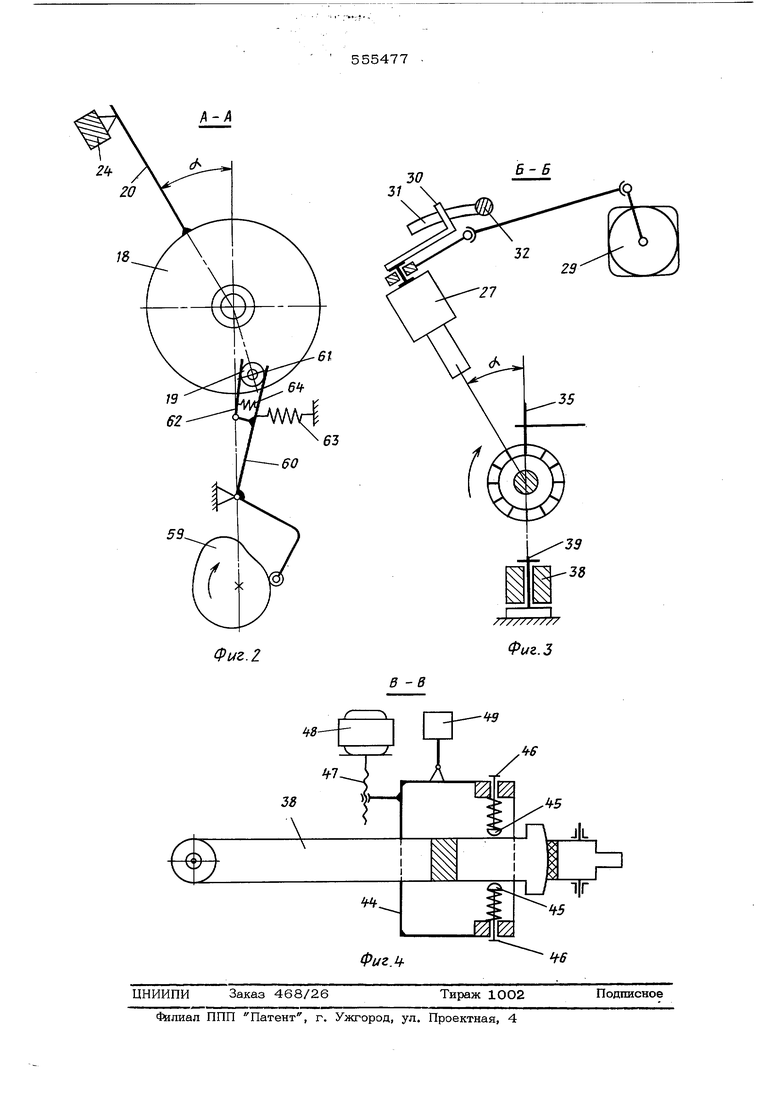
(54) СТАНОК ДЛЯ ПРОДОРАЖИВАНИЯ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН цяшей через ось коллектора и лежащей в одной плоскости с осью датчика угла поворота, перпендикулярной к оси коплектора, от приво да, связанного с приводом датчика угла перекоса. Кроме того, привод поворота рычага содержит каретку с подпружиненными толкателями и связанный с распределителькы.м ва лом тормоз, На фиг, i представпена схема предлагаемого станка дпя продораживания коллекторов; на фиг, 2 - раарез Л-А vra фиг. 1; на фиг, 3Б-Б на фиг, 1; на фиг. 4 - Б-В на фиг. 1, В закрепленной на станине 1 втулке 2 установлен на подшипниках шпиндель 3, патрон 4 которого служит для закрепления якоря с обрабатываемым коллектором, поддерживаемого центром о. На шпинделе 3 жестко закреплен диск 6 с отверстиями, в кото- двух сторон диск рых находятся шарики .. снабжен фрикш-юнны:.лИ кольцами 8 и 9. На шпинделе свободно сидит диск 10, на котором закреплены гибкие спицы 11, несушие обод 12, последний зажат между прижиунь:м 13 и ведущим 14 роликами, жестко закрепленными на валу электродвигателя 1 5. Диск 10 находится под воздеГютвием стремящейся его к фрикционному кольцу 8 пружины 16), вто}:О : конец которой упирается в закреггп:е;1п;-;й на шпинделе 3 подшипник 17. Пс друт-ую сторону от диска 6 на шпиндель 3 свобоано посажена ведущая полумуфта 18, снабж.еттная поводком 19 и ограничителем 20. Втулка 21 под воздействием пружины 22 стремится прижать ведущую полу- муфту 18 к фрикционному кольцу 9. На втулку 2 свободно посажена траверса 23, один конец которой является упором 24 для ограничителя 20, а на другом установлен блок 25, состоящий из датчика 26 угла перекоса коллекторных пластин и датчика 27 угла поворота коллектора, с возможностью вращения вокруг оси последнего. В качестве датчиков 26 и 27 применены фотоэлектрические преобразователи положения штриха в электри ческий сигнал. Траверса 23 посредством механической передачи 28 связана с электро двигателем 29. Блок 25 датчиков снабжен поводком 30, входящим в вилку 31, укрепленную на штоке 32, который связан с электродвигатепем 33. Шток 32 также связан с датчиком 34 дистанционной передачи угла, Фреза 35 находится на каретке 36, установленной с возможностью поступательного движения параллельно оси фрезеруемой изоляционной прокладки по направляющим 37, укрепленным на рычаге 38, который установлан на станине 1 с возможностью поворота вокруг щтыря 39, ось которого пересекает ось обрабатываемого коллектора у внешнего его края. Оси штыря 39 и датчика 2 угла поворота коллектора леж.ат в одной iiaJuKOcти. К боковой поверхности рычага 38 гфужиной 40 прижат двуплечий рычаг 41, снаб женный фрикционной накладкой 42 и являк шийся тормозом рычага 38. Под рычагом 38 на закрепленных на станине 1 направлгьюших 43 установлена каретка 44 с подпружиненными толкателями 45, снабженными ограничителями 46, которая механической передачей 47 связана с электродвигателем 48. С кареткой 44 соединен приемг.ик 49 дистанционной передачи угла, соединенный электрически с датчиком 34. С горизонтальным плечом рычага 4J. находится в контакте толкатель 50, ролик 51 которого опирается на кутвчок 52, закрепленный на распределительном валу 53. Закреплevгr ый на том же валу барабанный кулачок 54 посредством рычага 55 и тяги 56 связан с каречкой 36, Закрепленный на распределительном валу 53 торцовый кулачок 57 взаимодействует с одним плечом рычага сцепления 38, второе плечо взаимодействует с втулкой 21, закрепленный на распределительном валу кулачок 59 взаимодействует с одним плечом рычага 6О, второе плечо которого снабжено жесткой 61 и подпружиненной 62 губками, охватывающими поводок 19, Пружина 63, прижимающая рычаг 60 к кулачку 59, создает усилие, достаточное для преодоления усилия пружины 64 и отжатия губки 62 при упирании ограничителя 20 в упор 24, Распределительный вал 53 через редуктор 65 соединен с электродвигателем 66. Устройство работает следующим образом, В исходном положении станка рычаг 58 упирается на выступ кулачка 57 и удерживает в отведенном положении втулку 21. Под действием пружины 16 диск 10 прижат к фрикционному кольцу 8, а шариками 7 ведущая попумуфта 18 отведена от фpикlшoннor п кольца 9, При этом рычаг 60 опирается на впадину кулачка 59, ограничитель 2О прижат к упору 24, губка 62 отжата и между губкой 61 и поводком 19 имеется зазор. Ограничитель 2О и ось датчика 27 расположены под одинаковым углом об к вертикальной оси, обеспеченным взаимным расположением упора 24 и датчика 27 на траверсе 23. Каретка 36 с фрезой 35 отведена. Ролик 51 находится на выступе кулачка 52, толкатель 50 нажимает на горизонтальное плечо рычага 41, второе плечо которого с фрикционной накладкой 42 отведено от рычага 38, и последнийрасторможен. Толкатели 45 выдвинуты внутрь каретки 44 полностью до упора ограничителей 46 в ушко каретки 44. При этом
рычаг 38 удерживается толкателями 45 в центре каретки 44,
Закрепляют в станке с помощью патрона 4 и центра 5 якорь электрической машины с подлежащим обработке коллектором и вклю чают станок. При этом фреза 35 получает непрерывное вращение. Включается электродвигатель 15, управляемый сигнал датчика 27 угла поворота коллектора, и посредством фрикционного ролика 1.4 и обода 12 через сцепленный со щпинделем 3 диск 10 поворачивает якорь до совпадения ближайшей меж- ламельной изоляционной прокладки коллектор с осью датчика 27 угла поворота коллектора Таким образом осуществляется предварительное ориентирование коллектора после загрузки. Электродвигатель 29 отключен. Одновременно начинает работать электродвигатель 33, управляемый сигналами датчика 26 угла перекоса коллекторных пластин и посредством штока 32 с вилкой 31 и поводка 30 поворачивает блок 25 датчиков 26 и 27 вокруг оси датчика 27 до совпадения оси датчика 26 угла перекоса коллекторных пластин с той же межламельной изоляционной проклаДкой. При движении штока 32 его перемещени сообщается датчику 34 дистанционной передачи угла (например, дифференциально-трансформаторной системы), возникает рассогласование между ним и приемником 49, резуль тирующий сигнал управляет электродвигателем 48, который, перемещает каретку 44 до исчезновения рассогласования между датчиком 34 и приемником 49 дистанционной передачи угла. При этом рычаг 38 под воздействием толкателей 45 поворачивается в положение, соответствующее повернутому положению блока 25 датчиков, и таким образом направляющие 37 оказываются расположенными параллельно межламельной изоляцион- ной прокладке в том ее положении, которое она займет после предстоящего поворота якоря. По окончании поворота якоря и поворота блока 25 датчиков при наличии совместного сигнала датчика 26 угла перекоса коллекторных пластин и датчика 27 угла поворота коллектора о совмещении их осей с межламельной изоляционной прокладкой включается электродвигатель 66 и через редуктор 65 начинает вращать распределительный вал 53, При этом вначале ролик 51 сходит с выступа кулачка 52, и толкатель 50 отпускает рычаг 41, который под воздействием пружины 40 затормаживает рычаг 38, Одновременно рычаг 8 сходит с выступа кулачка 57 и отпускает втулку 21, которая под воздействием пружины 22 прижимает ведущую полумуфту 18 к фрикционному кольцу 9, осуществляя таким образом сцепление ведущей попумуфты 18 со щпинделем 3, Усипие, развлваемое пружи ой 22, значительно превышает усилие прркины 16, поэтому ведущая полумуфта 18 сцепления отводит посредством шариков 7 диск 10, расцепляя его и шпиндель 3. При дальнейшем повороте распределительного вала 53 конец рычага 60 начинает подниматься на выступ кулачка 5 9. При этом вначале, пока выбирается зазор между губкой 61 и поводком 19, ведущая полумуфта 18 остается неподвижной, а затем под воздействием губки 61 она поворачивается вместе со щпинделем 3 и закрепленным в патроне 4 якорем. Поворот заканчивается после полного подъема рычага 60 на выстуг кулачка 59. При этом ограничитель 20 оказывается повернутым на угол of. по часовой стрелке (см. фиг. 2) и совмешен с вертикальной осью. На такой же угол оказывается повернуты.1 и закрепленный в патроне 4 якор к спедор.агельно, межламельная изоляционная прокладка, которая перед поворотом была соЕмешена с осью датчика 27, после поворота оказывается совмещенной с вертикальной осью При дальнейшем повороте распределительного вала 53 на выступ кулаЧдка 57 попалает .конец рычага 58, и последаккй отводит втулку 21, сжимая пружину 22, Под воздействием пружины 16 цис.к 10 сцепляется со шпинделем 3 и фиксирует его в повернутом положении, являясь при неработающем электродвигателе 15, цепь которого разрывается с момента включения электродвигателя 66, тормозом. Шарики 7 отводят ведущую полумуфту 18, расцепляя ее и шпиндель 3, При дальнейшем повороте распределительного вала 53 конец рычага 60 опускается по профилю кулачка 59 под воздействием пружины 63 и поворачивает ведущую полумуфту 18 в исходное положение посредством поводка 19, зажатого пружиной 64 между губками 61 и 62, При соприкосновении ограничителя 20 с упором 24 поворот полумуфты 18 прекращается, а рычаг 60 продолжает двигаться до полного спуска во впадину кулачка 59 за счет отжима губки 62, После поворота, якоря в поле зрения датчиков 26 и 27 попадает новая межламелькая изоляционная прокладка коллектора. Вследствие возможных отклонений размеров коллектоаных пластин и изоляционных прокладок, данная прокладка может иметь некоторые отклонения как от оси датчика 27 угла поворота коллектора, так и от оси датчика 26 угла перекоса коллекторных пластин Эти отклонения вызывают появления сигналов датчиков 27 и 26, которые управляют работой электродвигателей 29 и 33. Электродвигатель 29 перемещает траверсу 23 с упором 24 и блоком 25 датчиков до совмещения оси датчика 27 с межламельной изолящюнной прокладкой, а электродвигатель
33 поворачивает блок 25 датчиков до со&мешения оси датчиков 26 с той же межпа- мепьной изоляционной прокладкой. При пере мешении упора 24 ограничитель 20 остается прижатым к нему под действием пру- 5 жины 64, поэтому угол об между ограничителем 20 и вертикальной осью и между осью датчика 27 и вертикальной осью остается одинаковым, что обеспечивает совмещение с вертикальной осью при последующем повороте о межламельной изоляционной прокладки, имеющей отклонения по шагу. При работе электродвигателя 33 перемещение щтока 32 сообщается датчику 34 дистанционной передачи угла, возникает рассогласование между ним 16 и приемником 49, работает электродвигатель 48 и перемешает каретку 44 до устранения указанногд рассогласования. При перемещении каретки 44 рычаг 38,, заторможенный рычагом 41, остается нацодвижным, а один из 20 толкателей 45, упираясь в рычаг 38 и сжимая пружину, частично утапливается в ущко скобы.
По окончании поворота якоря параллельно описанным выше действиям узлов станка на- 515 чинается подача фрезы 35 от кулачка 54 посредством рычага 55 и тяги 56. Происходит фрезерование межламельной изоляционной прокладки, совмещенной при повороте якоря с вертикальной осью. Так как при 30 этом рычаг 38 удерживается рычагом 41 в положении, соответствующем перекосу данной изоляционной прокладки, движение фрезы происходит вдоль фрезерной прокладки независимо от ее перекоса. По окончании фрезе- 85 рования происходит отвод фрезы 35 в исходное положение, после чего кулачок 52 посредством толкателя 50 нажимает на рычаг 41 и {Застормаживает рычаг 38. Последний под действием утопленного в ущко каретки Ю толкателя 45 поворачивается, устанавливается посередине каретки 44 и -таким образом устанавливает направляющие 37 под углом, соответствующим перекосу межламельной изоляционной прокладки, с которой к этому моменту совмещены оси датчиков 26 и 27.
На этом заканчивается цикл фрезерования одной межламельной изоляционной прокладки, соответствующей одному обороту распределительного вала 53. В последующих циклах все действия узлов станка повторяются. После совершения распределительным валом 53 числа оборотов, равного числу пластин коллектора, по сигналу, например, счетчика
оборотов работа электродвигателя 66 прекращается и этим заканчивается полный цикл продораживания якоря. Следующий цикл, после загрузки нового якоря, начинается с его ориентирования и далее выполняется, как описано выше.
Эффективность применения данного станка по сравнению с существующими конструкциями заключается в повышении качества изготовления коллекторов за счет исключения брака при наличии перекоса коллекторных пластин.
Формула изобретения
1.Станок для продораживания коллекторов электрических машин, содержаший механизм поворота коллектора с датчиком утла поворота, расположенным вместе с упором на траверсе, установленной с возможностью поворота вокруг оси обрабатываемого коллектора и снабженной приводом, управляемы сигналами датчика угла поворота, фрезу, установленную в направляющих, механизм подачи фрезы и распределительный вал, отличающийся тем, что, с целью повышения качества изготовления коллекторов за счет исключения брака при наличии перекоса коллекторных пластин, станок снабжен датчиком угла перекоса, установленным на траверсе с возможностью поворота вокруг оси датчика угла поворота и связанным с приводом, управляемым сигналами датчика угла перекоса, а направляющие фрезы закреплены на рычаге, установленном с возможностью поворота вокруг оси, проход5Ш1ей через ось коллектора и лежащей в одной плоскости с осью датчика угла поворота, перпендикулярной к оси коллектора, от привода, связанного с приводом датчика угла перекос
2.Станок по п. 1,отличаюшийс я тем, что привод поворота рычага содержит каретку с подпружиненными толкателями и связанный с распределительным валом тормоз.
Источники информации, принятые во внимание при экспертизе:
1.Патент США №2966098, кл. 29-59 1961.
2.Авторское свидетельство СССР -№221805, М. Кл. Н Oil 43/06, 1968 (прототип).
/1-У1
Фиг.г
Б-Б
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для автоматического продораживания коллекторов электрических машин | 1977 |
|
SU708446A1 |
| Устройство для автоматического поворачивания коллекторов электрических машин номинальными шагами в станке для обработки ламелей | 1973 |
|
SU477494A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ПОВОРАЧИВАНИЯ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 1968 |
|
SU221805A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ПОВОРАЧИВАНИЯ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 1973 |
|
SU388332A1 |
| Устройство для продораживания коллекторов электрических машин | 1979 |
|
SU881918A1 |
| АВТОМАТИЗИРОВАННЫЙ СТАНОК ДЛЯ ПРОДОРАЖИВАНИЯ ЯКОРНЫХ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 2005 |
|
RU2291763C1 |
| Станок для автоматического продораживания коллекторов электрических машин | 1980 |
|
SU955304A1 |
| СТАНОК ДЛЯ ПРОДОРОЖИВАНИЯ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 2022 |
|
RU2784038C1 |
| Полуавтоматический станок для продораживания коллекторов электрических машин | 1977 |
|
SU691969A1 |
| СТАНОК ДЛЯ АВТОМАТИЧЕСКОГО ПРОДОРАЖИВАНИЯ КОЛЛЕКТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 1992 |
|
RU2088008C1 |