оо ьо
N
ел
чатой пары 10 и механизмаэ обеспечивающего прерывистый характер движения в виде трехпрорезного трехпапьцевого мальтийского механизма 11. Привод конвейера 3 от другого элеватора выполнен аналогично. 5 ил.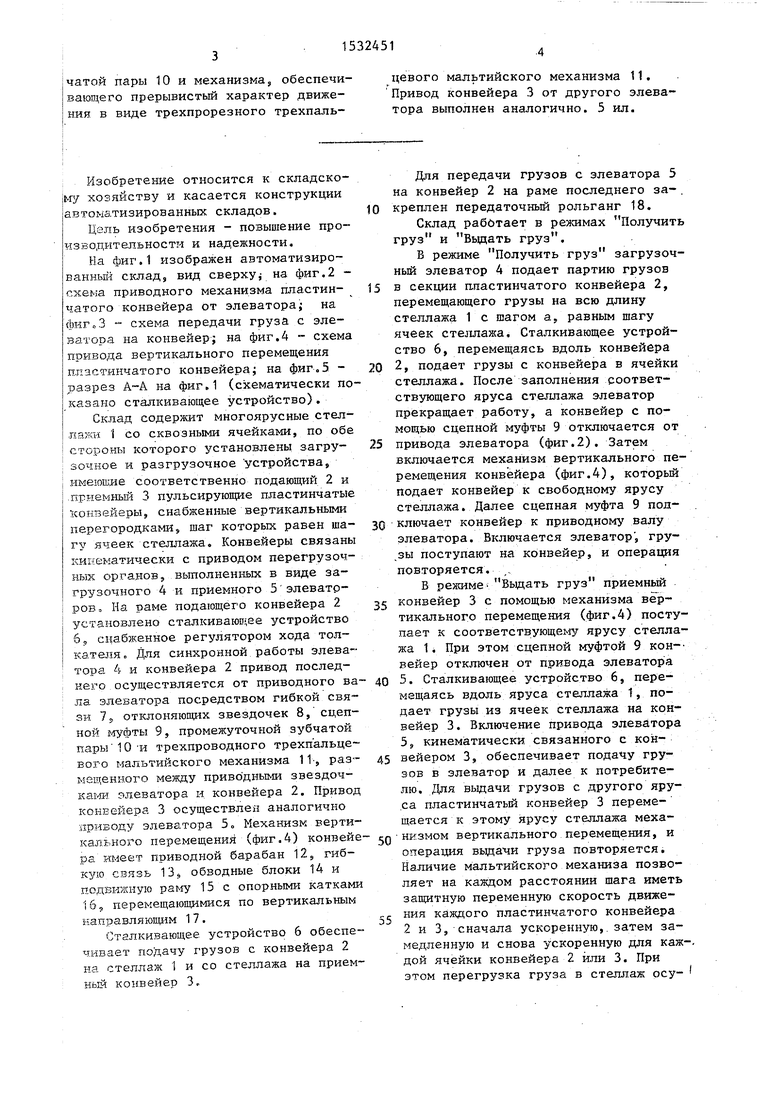
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Автоматизированный склад цилиндрических грузов | 1979 |
|
SU867791A1 |
| Склад для хранения штучных грузов | 1989 |
|
SU1729958A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Склад для штучных грузов | 1973 |
|
SU590193A1 |
| Склад для штучных грузов | 1979 |
|
SU878674A1 |
| МНОГОЯРУСНАЯ АВТОМАТИЗИРОВАННАЯ АВТОСТОЯНКА МОДУЛЬНОГО ТИПА | 2008 |
|
RU2376430C1 |
| УСТАНОВКА БАШЕННОГО ТИПА ДЛЯ СКЛАДИРОВАНИЯ ИЗДЕЛИЙ "ПАНАМАК" | 1992 |
|
RU2057691C1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО АВТОМАТИЗИРОВАННОГОСКЛАДА | 1971 |
|
SU299418A1 |
| СКЛАД ДЛЯ ХРАНЕНИЯ И ПЕРЕМЕЩЕНИЯ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 1993 |
|
RU2077466C1 |

Изобретение относится к складам для хранения, автоматизированного приема и выдачи штучных грузов, которые размещаются в ячейках на многоярусном стеллаже. Цель изобретения - повышение производительности и надежности. Автоматизированный высотный склад содержит многоярусный стеллаж, по обе стороны которого установлены пульсирующие подающий 2 и приемный 3 пластинчатые конвейеры, связанные соответственно с загрузочными и приемным элеваторами. Подача грузов на стеллажи и их выдача на конвейер осуществляется сталкивающим устройством, которое имеет регулятор хода толкателя. Для синхронной работы элеватора и конвейера 2 привод последнего осуществляется от приводного вала элеватора с помощью гибкой связи 7, отклоняющих звездочек 8, сцепной муфты 9, промежуточной зубчатой пары 10 и механизма, обеспечивающего прерывистый характер движения в виде трехпрорезного трехпальцевого мальтийского механизма 11. Привод конвейера 3 от другого элеватора выполнен аналогично. 5 ил.
Изобретение относится к складско- му хозяйству и касается конструкции автоматизированных складов.
Цель изобретения - повышение производительности и надежности.
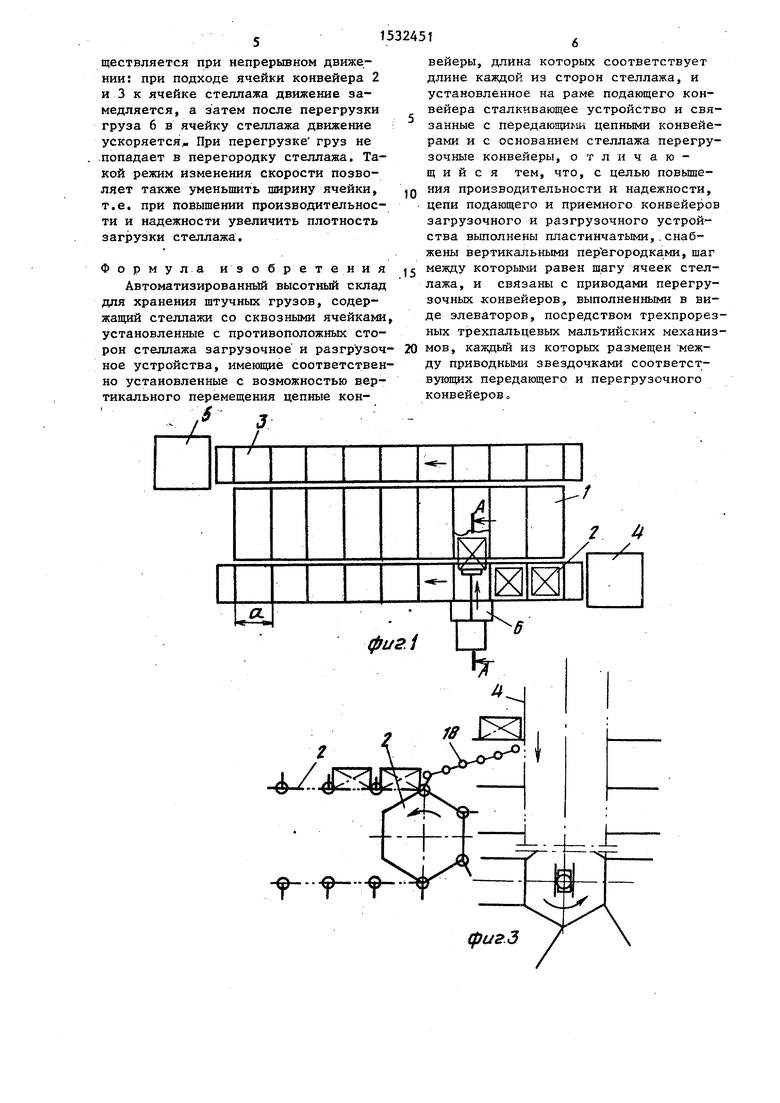
На фиг.1 изображен автоматизиро- ванньш склад, вид сверхуj на фиг.2 - схема приводного механизма пластинчатого конвейера от элеватораj на (Ьиг«3 схема передачи груза с элеватора на конвейер; на фиг.4 схема привода вертикального перемещения пластинчатого конвейера; на фиг.5 - разрез А-А на фиг,1 (схематически показано сталкивающее устройство).
Склад содержит многоярусные стел- пажи 1 со сквозными ячейками, по обе стороны которого установлены загрузочное и разгрузочное устройства, имеюпще соответственно подающий 2 и .приемный 3 пульсирующие пластинчатые конвейеры, снабженные вертикальными перегородками, шаг которых равен шагу ячеек стеллажа. Конвейеры связаны кинематически с приводом перегрузочных органов, вьтолненных в виде загрузочного 4 и приемного 5 элеваторов. На раме подающего конвейера 2 установлено сталкивающее устройство 65 снабженное регулятором хода толкателя. Для синхронной, работы элеватора 4 и конвейера 2 привод послед- осуществляется от приводного вала элеватора посредством гибкой связи 7,, отклоняющих звездочек 8, сцепной фты 9, промежуточной зубчатой пары 10 И трехпроводного трехп альце- вого мальтийского механизма 11-, размещенного между приво дными звездоч- каш-1. элеватора и, конвейера 2. Привод конЕейера 3 осуществлен аналогично приводу элеватора 5„ Механизм вертикального перемещения (фиг.4) конвейера имеет приводной барабан 12, гибкую связь 13, обводные блоки 14 и под вижную 15 с опорными катками 165 перемещающимися по вертикальным направляющим 17.
Сталкивающее устройство 6 обеспечивает подачу грузов с конвейера 2 на стеллаж 1 и со стеллажа на приемный конвейер ЗДля передачи грузов с элеватора 5 на конвейер 2 на раме последнего за-.
креплен передаточный рольганг 18.
Склад работает в режимах Получить груз и Вьщать груз.
В режиме Получить груз загрузочный элеватор 4 подает партию грузов
в секции апастинчатого конвейера 2, перемещающего грузы на всю длину стеллажа 1 с шагом а, равным шагу ячеек стеллажа. Сталкивающее устройство 6, перемещаясь вдоль конвейера
2, подает грузы с конвейера в ячейки стеллажа. После заполнения соответствующего яруса стеллажа элеватор прекращает работу, а конвейер с помощью сцепной муфты 9 отключается от
привода элеватора (фиг.2). Затем
включается механизм вертикального перемещения конвейера (фиг.4), которьш подает конвейер к свободному ярусу стеллажа. Далее сцепная муфта 9 подключает конвейер к приводному валу элеватора. Включается элеватор , гру- ,зы поступают на конвейер, и операция повторяется. ,.
В режиме Выдать груз приемный
конвейер 3 с помощью механизма вертикального перемещения (фиг.4) поступает к соответствующему ярусу стеллажа 1. При этом сцепной муфтой 9 кон-- вейер отключен от привода элеватора
ществляется при непрерьшном движении: при подходе ячейки конвейера 2 и 3 к ячейке стеллажа движение замедляется, а затем после перегрузки груза 6 в ячейку стеллажа движение ускоряется При перегрузке груз не .попадает в перегородку стеллажа. Такой режим изменения скорости позволяет также уменьшить ширину ячейки, т.е. при повышении производительности и надежности увеличить плотность заг15узки стеллажа.
Формула изобретения Автоматизированный высотный склад для хранения штучных грузов, содержащий стеллажи со сквозными ячейками установленные с противоположных сторон стеллажа загрузочное и разгрузочное устройства, имеющие соответственно установленные с возможностью вертикального перемещения цепные кон-©ф -Q-
вейеры, длина которых соответствует длине каждой из сторон стеллажа, и установленное на раме подающего конвейера сталкивающее устройство и связанные с передающими цепными конвейерами и с основанием стеллажа перегрузочные конвейеры, отличающийся тем, что, с целью noBbmieg ния производительности и надежности, цепи подающего и приемного конвейеров загрузочного и разгрузочного устройства выполнены пластинчатыми,.снабжены вертикальными пер егородками, шаг
5 между которыми равен шагу ячеек стеллажа, и связаны с приводами перегрузочных конвейеров, выполненными в виде элеваторов, посредством трехпрорез- ных трехпальцевых мальтийских механиз0 мов, казвдый из которых размещен между приводными звездочками соответствующих передающего и перегрузочного конвейеров
(риг.З
Фиг.5
П
17
| Патент США № 4016986, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
