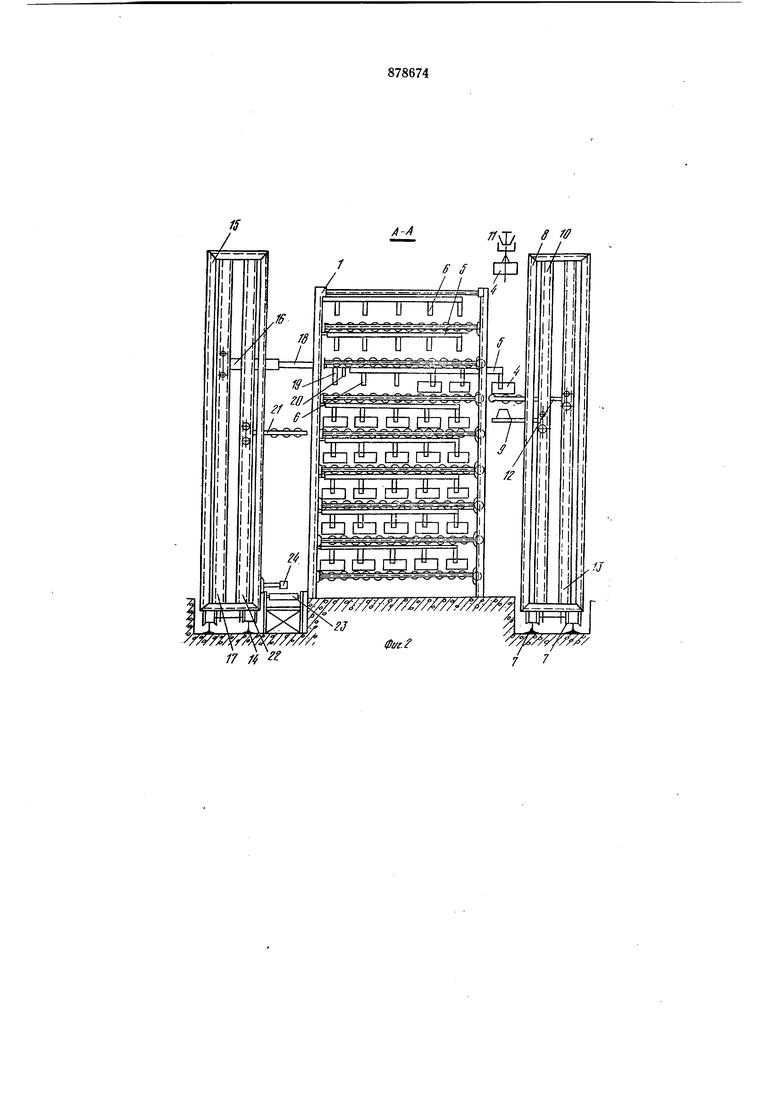
щается по направляющим 10 и служит для принятия штучных грузов 4 С накопительного приемного конвейера 11, а также передвижную по вертикали дополнительную -площадку 12, которая перемещается по направляющим 13 и служит для распределения штучных грузов 4 в .продольные ячейки .3 склада; на рельсовых путях 14 установлены -передвижные устройства для разгрузки 15, каждое из которых имеет передвижную по вертикали площадку 16, которая перемещается .по направляющим 17 и служит для установки привода 18, имеющего толкатель 19 для перемещения груза 4, :находящегося в конце продольной ячейки 3, и механизм автоматического зацепления и расцепления 20 -с бесприводными щтангами 5, а также передвилшую по вертикали площадку 21-, которая .перемещается по направляющим 22 и служит при выдаче для принятия щтучных грузов 4 из продольных ячеек 3 и подачи их на отборочный конвейер 23, которые сталкиваются на последний сталкивателем 24. Приводы для перемещения устройств .и их площадок на чертежах не показаны.
Для повьппения .производительности склада за счет исключения холостого хода освободиБщихся площадок 9 и 21 (первой- от ячейки до накопительного приемного конвейера, а второй - от отборочного конвейера до соответствующей ячейки) число, площадок 9 и 21 увеличивается и применяется кольцевой принцип их перемещения элеваторного типа.
Работа склада осуществляется следующим образом.
Склад для щтучных грузов может выполнять прием и складирование щтучных грузов, выдачу щтучных грузов на комплектовку или погрузку для отправки потребителям, прием и выдачу щтучных грузов одновременно, а также может работать как в автоматическом режиме, так в режиме с дистанционным управлением с помощью оператора.
Число загрузоч.но-разгрузочных устройств выбирают от необходимого режима работы склада.
1. Прием и складирование щтучных
грузов.;
При выполнении приема и складирования грузов работают совместно устройство 8 и одно .из устройств 15. Перед началом цикла загрузки оператор выбирает с помощью переключателей режим работы склада. .После подачи команды «начало цикла загрузки напротив одной .из свободных или частично заполненных секций 2 склада в автоматическом режиме или в режИМе дистанционного управления устанавливается устройство 8 и одно из устройств 15. Затем в автоматическом режиме или в режиме дистанционного управления на против свободной или частично заполненНОЙ продольной ячейки 3 выбранной секции 2 для загрузки устанавливается распределительная площадка 12 устройства 8 и площадка 16 выбранного для загрузки 5 одного из устройств 15. .По окончании установки устройства в и его распределительной площадки 1;2 иапроти.в свободной секции 2 склада и свободной продольной ячейки 3, приемная площадка 9 устройства 8,
передвигаясь автоматически, занимает
крайнее верхнее положение. При устанавке площадки 9 устройства 8 и площадки 16 устройства 15 автоматически подается команда на сброс груза 4 с накопительного
5 приемного конвейера 11.
Затем .приемная площадка 9 с грузо-м 4 автоматически перемещается вниз и проходит внутри П-образной площадки 12, оставляя на ней груз 4. Далее при наличии
0 груза 4 -на распределительной .П-образной площадке 12 автоматически подается команда на включение привода 18, который с помощью механизма автоматического зацепления и расцепления 20 входит в
5 зацепление с бесприводной щтангой 5 и перемещает ее иа щаг в направлении распределительной площадки 12 с установленным |На ней грузом 4 устройства 8.
При этом толкатели 6 свободно откло0 .няются лежащими в .продольных ячейках грузами в направлении, противоположном перемещению щтанги, и не препятствуют ее движению. После остановки щтанги толкатели занимают вертикальное положение и
5 входят в зацепление с грузом 4 (на чертежах предста.влены грузы, имеющие центральное отверстие).
Переместив на щаг бесприводную щтангу 5, привод 18 автоматически начинает
0 обратное движение, тем самым сообщает возвратно-поступательноеперемещение
бесприводной щтаиге 5. Толкатели б, перемещаясь вместе с ней, .перемещают на щаг грузы 4, так как поворот их в направлении,
5 противоположном перемещению штанги, ограничен.
Соверщив возвратное перемещение на щаг, привод Ii8 выходит из зацепления с бесприводной щтангой 5, оставляя ее в на0 чальном положении. .После этого прием.ная площадка 9 устройства 8 автоматически перемещается в крайнее верхнее положе- ние для приема нового груза. При этом снова подается команда на сброс груза 4, и
5 процесс загрузки повторяется. Заполнив продольную ячейку 3 .грузами 4, автоматически или в режиме дистанционного управления с помощью оператора, распределительная площадка 12 устройства 8 и площадка 1:6 с расположенным на ней приводом 18 устройства 15 устанавливаются напротив следующей свободной ячейки 3. Процесс загрузки вновь выбранной продольной ячейки 3 проходит так, как было
описано ранее. После заполнения всех продольных ячеек 3 загружаемой секции 2 склада автоматически или в дистанционного управления с помощью оператора выбирается следующая свободная секция 2 склада. Загрузка ячеек 3 вновь выбранной секции 2 склада происходит аналогично описанной ранее. При заполнении всех секций 2 склада прием и складирование штучных грузов 4 прекращаетсяП. Выдача штучных грузов на комплектовку или погрузку для отправки потребителю. При выдаче грузов работает одно или несколько устройств 15. Перед началом выдачи штуч:ных грузов оператор выбирает с помощью переключателей режим работ склада, определяет . количество устройств 15, необходимых для выдачи, задает с помощью набйрателя количество выдаваемых грузов 4. После подачи команды «начало цикла выдачи в автоматическом режиме или :В режиме дистанционного управления устанавливается одно или несколько устройств 15 напротив секций 2 склада. Затем в автоматическом режиме или в режиме дистанционного управления напротив заполненных полностью или частично продольных ячеек 3 устанавливаются площадки 16, выбранные для выдачи устройств 15. По окончании установки устройств 15 и их площадок Ii6 приемные площадки 21, которые предназначены для приема штучных грузов 4 из Продольных ячеек 3 и находятся в нормальном состоянии в крайнем нижнем положении, автоматически перемещаясь вверх, устанавливаются напротив продольных ячеек 3, подлежащих разгрузке. При установленных приемных площадках 21 автоматически подается команда на включение приводов 1в, которые с помощью механизмов автоматического зацепления и расцепления 20 входят в зацепление с бесприводными штангами 5, перемещая их на шаг вдоль ячейки. При этом толкатели 19, установленные на выдвижной части приводов, входят в зацепление с первыми грузами 4, расположенными в конце продольных ячеек 3. Переместив на щаг бесприводные штанги 5, приводы 18 автоматически начинают обратное движение, тем самым сообщая возвратно-поступательное перемещение бесприводным щтангам 5, толкатели 6 которых, перемещаясь вместе с ними, перемещают на шаг грузы 4, находящиеся в продольных ячейках 3, а грузы 4, расположенные в конце продольных ячеек 3, перемещаются толкателями 19 на приемные площадки 21, выбранные для выдачи устройств 15. При наличии грузов 4 на площадках 21 последние автоматически, независимо друг от друга, перемещаются в крайнее нижнее положение, и при работающем отборочном конвейере 23 автоматически подается .команда на включение талкивателей 24. Освободившись от груов 4, площадки 21 автоматически перемеаются вверх, останавливаясь напротив азгружаемых ячеек 3. При остановке площадок 21 напротив разгружаемых ячеек Я процесс повторяется это происходит до тех пор, лока не будут освобождены от грузов 4 разгружаемые продольные 3 или не будет выдано заданное количество грузов 4. Освободившись от грузов 4, выбранные прс дольные ячейки 3 площадки 21 остаются в крайнем нижнем положении до тех пор,, лока площадки 16 с приводами le автоматически или в дистанционном режиме с помощью оператора не будут установлены напротив следующих заполненных продольных ячеек 3. После этого прл необходимости выдачи грузов 4 площадки 21 автоматически перемещаются вверх, устанавливаясь напротив ыбранных продольных ячеек 3. Процесс вы. грузки происходит таким же образом, как было описано выше. При освобождении выбранных для разгрузки секций 2 и необходимости выдачи грузов 4 автоматически или в режиме дистанционного управления с помощью оператора подается команда на перемещение устройств 16 и установки их напротив следующих заполненных секций 2 склада. После установки устройства 15 напротив следующих подлежащих разгрузке секций 2 склада путем установки площадок 16 снова выбираются заполненные ячейки 3 вновь выбранных секций 2 склада. Процесс выгрузки повторяется и продолжается до тех пор, пока не будет выдано заданное количество грузов 4. HI. Прием и выдача штучных грузов. При выполнении приема и выдачи штучных грузов одновременно одно из устройств 15 работает совместно с устройством 8 на прием, а второе устройство 15 самостоятельно работает на выдачу. Перед началом цикла «загрузка и выгрузка штучных грузов одновременно оператор выбирает с помощью переключателей работы склада, определяет, какое устройство 15 будет работать на загрузку, а какое на разгрузку, задает с помощью набйрателя количество выдаваемых грузов. После подачп команды оператором «начало цикла процесс работы склада происходит так, как было описано в каждом случае (I, П) в отдельности. Использование предлагаемого технического решения по созданию складов для штучных грузов позволяет снизить затраты на транспортировку, складирование и погрузку штучных грузов на 1 руб. реализуемой продукции, а также снизить затраты на капитальное строительство при проектировании новых заводов и повысить удобство эксплуатации склада.
Формула изобретения
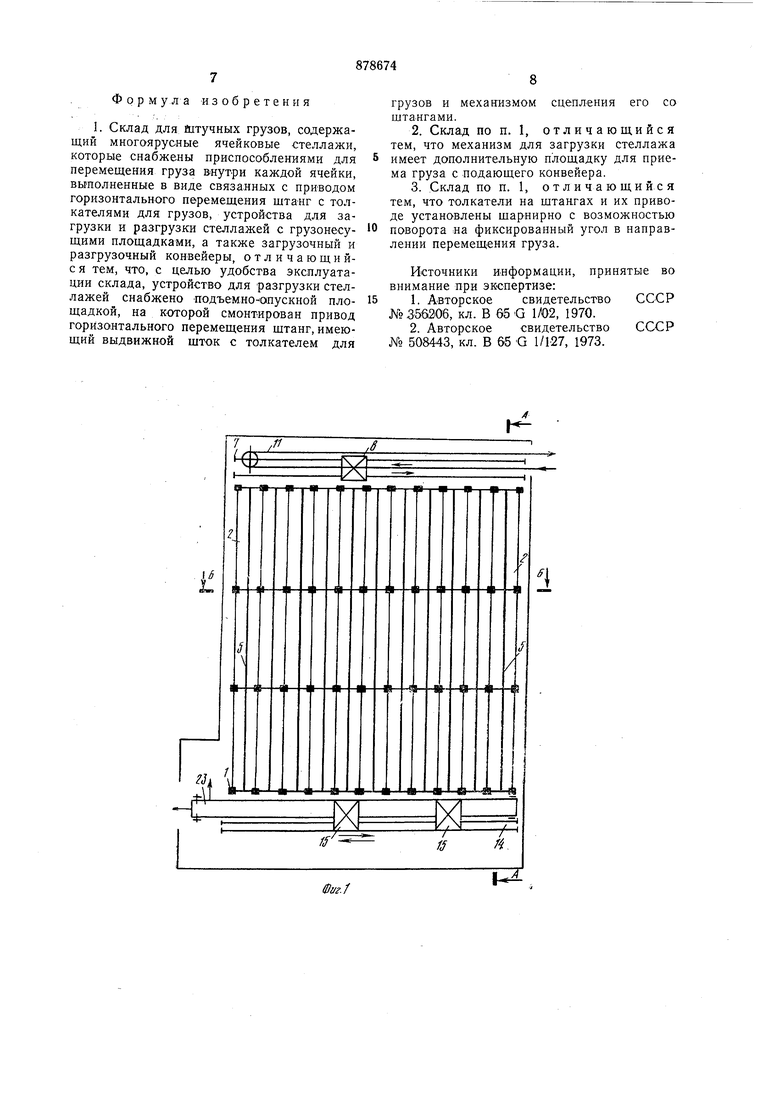
I. Склад для штучных грузов, содержащий многоярусные ячейковые стеллажи, которы-е снабжены приспособлениями для перемещения груза в«утри каждой ячейки, выполненные в виде связанных с приводом горизонтального перемещения щтанг с толкателями для грузов, устройства для загрузки и разгрузки стеллажей с грузонесущими площадками, а также загрузочный и разгрузочный конвейеры, отличающийс я тем, что, с целью удобства эксплуатации склада, устройство для разгрузки стеллажей снабжено подъемно-опускной площадкой, на которой смонтирован привод горизонтального перемещения щтанг, имеющий выдвижной шток с толкателем для
грузов и механизмом сцепления его со штангами.
2.Склад по п. 1, отличающийся тем, что механизм для загрузки стеллажа имеет дополнительную площадку для приема груза с подающего конвейера.
3.Склад по п. 1, отличающийся тем, что толкатели на штангах и их приводе установлены шарнирно с возможностью поворота на фиксированный угол в направлении перемещения груза.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР №356206, кл. В 65 G 1/02, 1970.
2.Авторское свидетельство СССР № 508443, кл. В 65 G 1/127, 1973.
в f I
/ / f///-/ 7 7
-jij g aai iio
i .ij ij-
i /
-Z:7 ; 47t777
w/wT///////////////
7/777/7///////////////////7//// Zfe/
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для штучных грузов | 1973 |
|
SU590193A1 |
| ЛОГИСТИЧЕСКИЙ ТЕРМИНАЛ | 2012 |
|
RU2511734C2 |
| Механизированный склад | 1989 |
|
SU1689231A1 |
| Склад для хранения штучных грузов | 1989 |
|
SU1729958A1 |
| Склад штучных грузов | 1980 |
|
SU992345A1 |
| Устройство для загрузки и разгрузки люлечного элеватора штучными грузами | 1980 |
|
SU929515A1 |
| Способ сортировки штучных грузов | 1988 |
|
SU1710150A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО АВТОМАТИЗИРОВАННОГОСКЛАДА | 1971 |
|
SU299418A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Автоматизированный склад для электроаппаратуры | 1983 |
|
SU1164158A1 |