1
(21)4401446/23-02
(22)04.04.88
(46) 07.01.90. Бюл. If 1
(71)Киевский институт автоматики им. XXV съезда КПСС
(72)В.Н. Максимчук (53) 621.771.23(088.8)
(56) Устройство вычислительное приводов УВ-П. Техническое описание и инструкция по эксплуатации Ша 2.572.001.ТО.СПКБ. Нефтегаэпром- автоматика, Минприбора СССР, 1975.
Авторское свидетельство СССР № 908442, кл. В 21 В 37/00, 1979.
(54) УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ НАЧАЛА ТОРМОЖЕНИЯ ПРИВОДА ПРОКАТНЫХ ВАЛКОВ (57) Изобретение относится к области автоматизации прокатного производства и может использоваться для выброса заготовки из прокатных валков на оптимальной скорости при реверсивной прокатке. Цель изобретения - повышение точности коррекции начала торможения привода и расширение области его применения. С этой целью применены частичная компенсация знакопеременных возмущающих воздействий и сглаживание величины отклонения скорости выброса от заданной оптимальной. 3 ил.
3
(Л

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического торможения проката до заданной скорости | 1986 |
|
SU1371729A1 |
| Устройство автоматического торможения проката до заданной скорости | 1979 |
|
SU908442A1 |
| Способ управления скоростным режимом при реверсивной прокатке и устройство для его осуществления | 1989 |
|
SU1632538A1 |
| Устройство автоматического торможения проката до заданной скорости | 1982 |
|
SU1034804A1 |
| Устройство определения текущих координат металла на реверсивном прокатном стане горячей прокатки | 1977 |
|
SU686793A1 |
| Устройство для контроля раствора валков прокатного стана | 1983 |
|
SU1088832A1 |
| Способ определения непрокатанной длины слитка в функции угла поворота прокатных валков и устройство для его осуществления | 1980 |
|
SU908444A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1969 |
|
SU475336A1 |
| Способ автоматического регулирования толщины проката и устройство для его осуществления | 1980 |
|
SU982835A1 |
| Устройство для автоматического сопровождения сварных швов и останова реверсивного прокатного стана | 1977 |
|
SU743739A1 |
Изобретение относится к области автоматизации прокатного производства и может использоваться для выброса заготовки из прокатных валков на оптимальной скорости при реверсивной прокатке. Цель изобретения - повышение точности коррекции начала торможения привода и расширение области его применения. С этой целью применены частичная компенсация знакопеременных возмущающих воздействий и сглаживание величины отклонения скорости выброса от заданной оптимальной. 3 ил.
Изобретение относится к области автоматизации прокатного производства и может быть использовано для выброса заготовки на оптимальной скорости при реверсивной прокатке.
Цель изобретения - повышение точности коррекции начала торможения привода и расширение области применения устройства.
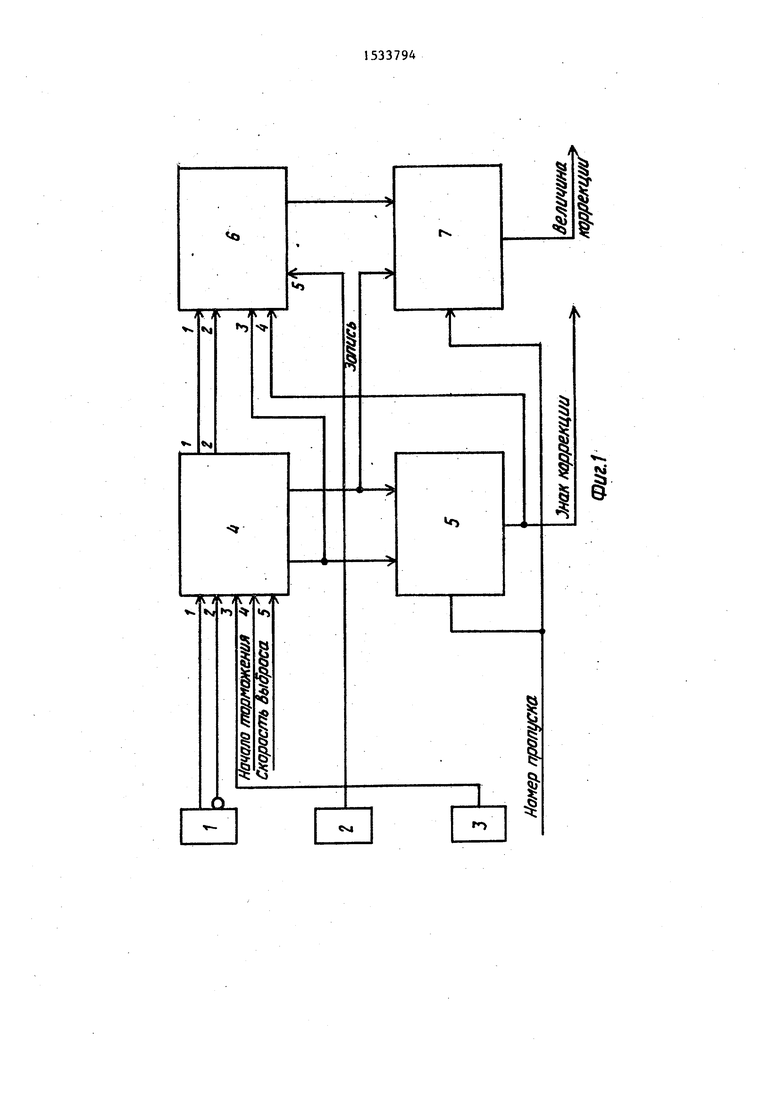
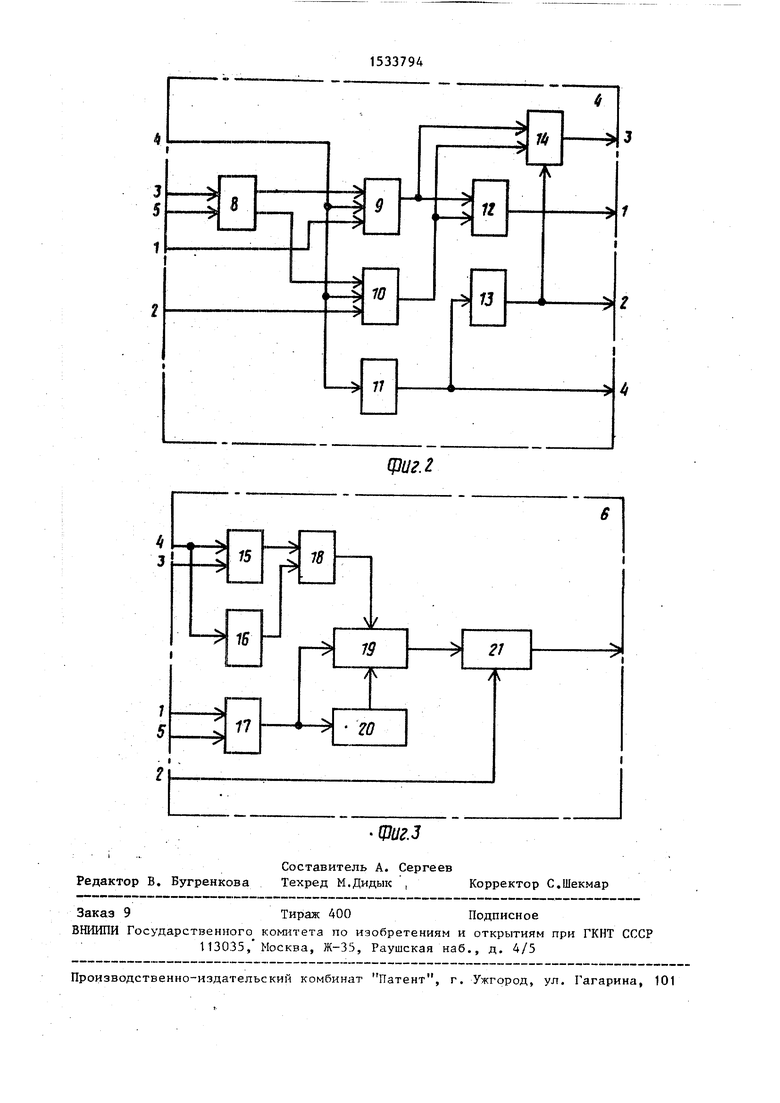
На фиг. 1 приведена блок-схема устройства для коррекции начала торможения привода прокатных валкоь; на фиг. 2 - блок-схема определения знака коррекции; на фиг. 3 - блок-схема определения величины коррекции.
Устройство для коррекции начала торможения привода прокатных валков (фиг. О содержит датчик 1 наличия проката в валках, датчик 2 угла noipрота валков, датчик 3 скорости, блок t определения знака коррекции, блок 5 памяти, блок 6 определения величины коррекции, блок 7 памяти, причем первый вход блока 4 определения знака коррекции соединен с прямым выходом датчика 1 наличия проката в валках, второй вход - с инверсным выходом датчика 1 наличия проката в валках, третий вход - с выходом датчика 3 скорости, четвертый вход - с входной клеммой Начало торможения устройства, пятый вход - с входными клеммами Скорость выброса устройства, первый и второй выходы блока 4 определения знака коррекции соединены соответственно с первым и вторым входами блока 6 определения величины коррекции, четвертый выход соединен с входами Запись блоков
СП 00 СО
1
СО 4ь
5 и 7 памяти, а третий выход соединен с третьим входом блока 6 определения величины коррекции и информационным входом блока 5 памяти, адресный вход которого соединен с входными клеммами Номер пропуска устройства и ад- ресным входом блока 7 памяти, а информационный выход соединен с выходной клеммой Знак коррекции устройства и четвертым входом блока 6 определения величины коррекции, пятый вход которого соединен с выходом датчика 2 угла поворота валков, а выход соединен с информационным входом блока 7 памяти, информационный выход которого соединен с выходными клеммами Величина коррекции устройства.
30
Блок 4 определения знака коррекции 20 (фиг. 2) содержит схему 8 сравнения, схемы 9 и 10 совпадения; формирователь 11 импульса схемы ИЛИ 12, форми- рователь 13 импульса и регистр 14, цричем первый вход схемы 8 сравнения 25 соединен с третьим входом блока, второй вход - с пятым входом блока, первый выход соединен с первым входом схемы 9 совпадения, а второй выход - с первым входом схемы 10 совпадения, второй вход схемы 9 совпадения соединен с четвертым входом блока, вторым входом схемы 10 совпадения и входом формирователя 11 импульса, третий вход соединен с первым входом блока, а выход - с первым информационным входом регистра 14 и первым входом схемы ИЛИ 12, второй вход которой соединен с вторым информационным входом регистра 14 и выходом схемы 10 совпадения, а выход - с первым выходом блока, третий вход схемы 10 совпадения соединен с вторым входом блока, выход формирователя 11 импульса соединен с четвертым выходом блока 45 и входом формирователя 13 импульса, выход которого соединен с вторым выходом блока и входом Сброс 0 регистра 14, выход которого соединен с третьим выходом блока.
Блок 6 определения величины коррекции (фиг. 3) содержит схемы 15 и 16 сравнения, схему 17 совпадения, схему ИЛИ 18, коммутатор 19, делитель 20 частоты и суммирующий счетчик 21, причем первый вход схемы 15 сравнения соединен с входом схемы 16 сравнения и четвертым входом блока, второй вход соединен с третьим входом
35
40
50
55
10
15
30
205 45
35
40
0
5
блока, а выход - с первым входом схемы ИЛИ 18, второй вход которой соединен с выходом схемы 16 сравнения, а выход - с управляющим входом коммутатора 19, первый информационный вход которого соединен с выходом схемы 17 совпадения и входом делителя 20 частоты, второй информационный вход коммутатора 19 соединен с выходом делителя 20 частоты, а выход - со счетным входом суммирующего счетчика 21, вход Сброс 0 которого соединен с вторым входом блока, а выход - с выходом блока, первый и второй входы схемы 17 совпадения соединены соответственно с первым и пятым входами блока.
Блоки 5 и 7 памяти могут быть выполнены на микросхемах КР 188 РУ 2А.
Блок 5 памяти может быть выполнен на двух таких микросхемах, а количество микросхем для блока 7 памяти определяется разрядностью величины коррекции. При поступлении импульса логической 1 на вход Запись блоков 5 и 7 памяти происходит запись информации, в остальное время происходит считывание записанной информации. Формирователи 11 и 13 импульса вырабатывают импульсы логической 1 по заднему фронту импульсов на их входах и могут быть выполнены на микросхемах К 155 АГ 1. Длительность выработанных импульсов должна быть достаточной для записи информации в блоки 5 и 7 памяти, а также сброса в О регистра 14 и суммирующего счетчика 21. I
Схемы 8, 15 и 16 сравнения могут быть выполнены на микросхемах К 555 СП 1.
На первом выходе схемы 8 сравнения появляется сигнал логической 1, если код на ее первом входе меньше кода на втором входе, на втором выходе схемы 8 совпадения появляется сигнал логической 1, если код на ее первом входе больше кода на ее втором входе. На выходе схемы 15 сравнения появляется сигнал логической 1 при равенстве кодов на двух ее входах, на выходе схемы 16 сравнения появляется сигнал логической 1 при поступлении на ее вход нулевого кода.
Регистр 14 может быть выполнен на двух RS-триггерах, входы Уста- Вовка 1 которых представляют собой
51
первый и второй входы регистра 14.
Коммутатор 19 может быть выполнен на микросхеме К 531 KII 11 П, причем при наличии сигнала логической 1 н его управляющем входе на выходе буде присутствовать информация с его первого входа, а при поступлении сигнал логического О на управляющий вход коммутатора 19, на его выходе будет присутствовать информация с второго входа.
Делитель 20 частоты может быть выполнен на микросхеме К 155 ИЕ8, в которой коэффициент деления установлен равным трем.
Устройство работает следующим образом.
С момента торможения привода происходит сравнение текущей скорости привода V n и заданной оптимальной скорости выброса ъ ъ схемой 8 сравнения, а также опрос датчика 1 наличия проката в валках. При этом возможны три случая: оптимальный выброс, ранний пыброс и поздний выброс.
При оптимальном выбросе Vn равна V6 в момент выброса заготовки из валков.
В этом случае на обоих выходах схемы 8 сравнения присутствуют сш- налы логического О, которые закрывают схемы 9 и 10 совпадения, в регистр 14 знака коррекции заносится код знака коррекции 00, а в счетчик 21 величины коррекции не поступают импульсы с датчика 2 угла поворота валков.
В момент окончания команды Начало торможения формирователь 11 импульса вырабатывает импульс логической 1, по которому происходит запись текущего знака коррекции 00 в блок 3 памяти и текущей величины коррекции 00 в блок 7 памяти по адресу, соответствующему коду текущего пропуска с устройства управления станом.
При раннем выбросе Vn больше V6iJ в момент выброса заготовки из вялков
В этом случае оказывается откры- . той схема 10 совпадения, сигнал логической 1 с ее выхода через схему ИЛИ 12 открывает схему 17 совпадения и импульсы с датчика 2 угла поворота валков будут поступать в суммирующий счетчик 21 до тех пор, пока скорости Vn и VBj не сравняются.
7946
При этом в регистр 14 знака коррекции занесется код отрицательного знака 01, а на выходе суммирующего счетчика 21 будет присутствовать код 5 текущей коррекции, причем если знак текущей коррекции с выхода регистра 14 будет совпадать со знаком коррекции одноименного пропуска предыдущего
Q цикла прокатки с выхода блока 5 памяти, или знак коррекции одноименного пропуска предыдущего цикла прокатки был нулевым, то на управляющий вход коммутатора 19 поступит сигнал логи5 ческой 1 с выхода схемы 15 или 16 сравнения, и в счетчике 21 будет образован код полной коррекции начала торможения привода. Если оба вышеназванных условия не выполняются,
0 то на управляющий вход коммутатора 19 поступит сигнал логического О и импульсы с датчика 2 угла поворота валков в суммирующий счетчик 21 будут поступать через делитель 20
5 частоты, образуя код частичной коррекции начала торможения привода. В момент окончания команды Начало торможения формирователь 11 импульса вырабатывает импульс логической
0 1, по которому происходит запись знака текущей коррекции в блок 5 па- пяти и кода величины коррекции в блок 7 памяти по адресу, пропорциональному текущему пропуску. Затем по импульсу логической 1 с выхода формирователя 13 импульса происходит сброс регистра 14 и суммирующего
счетчика 21 в нулевое состояние.
i
Q При позднем выбросе Vn сравняется с V 6э еще в момент нахождения заготовки в валках. В этом случае оказывается открытой схема 9 совпадения, сигнал логической 1 с ее вы5 хода через схему ИЛИ 12 открывает
схему 17 совпадения и импульсы с датчика 2 угла поворота валков будут поступать в суммирующий счетчик 21 до тех пор, пока заготовка не выйдет
0 из валков.
При этом в регистр 14 знака коррекции занесется код положительного знака О, а на выходе суммирующего , счетчика 21 будет присутствовать код текущей коррекции.
Дальнейшая работа устройства аналогична работе устройства при раннем выбросе.
5
Изобретение по сравнению с известным устройством обладает следующими преимуществами:
точность достижения заданной оптимальной скорости выброса увеличивается на 40% за счет использования частичной коррекции при знакопеременных возмущающих воздействиях и сглаживания величины отклонения скорости выброса от заданной оптимальной;
появляется возможность использовать изобретение с различными устройствами определения момента начала торможения привода прокатных валков за счет запоминания знака и величины 1 х ррекции начало торможения в каждом пропуске устройства. Формула изобретения
Устройство для коррекции начала торможения привода прокатных валков, содержащее датчик наличия проката в валках, датчик угла поворота валков, датчик скорости, блок определения знака коррекции, блок памяти, причем первый вход блока определения знака коррекции соединен с прямым выходом датчика наличия проката в валках, второй вход соединен с инверсным выходом датчика наличия проката в валках, третий вход соединен с выходом датчика скорости, четвертый вход соединен с входной клеммой Начало торможения устройства, пятый вход соеди- ции устройства.
иа, 5337948
нен с входными клеммами Скорость выброса устройства и адресный вход блока памяти соединен с входными клем- мами Номер пропуска устройства, о т- личающееся тем, что, с целью повышения точности коррекции начала торможения привода и расширения области его применения, оно снабжеЮ но блоком определения величины коррекции и вторым блоком памяти, причем первый вход блока определения величины коррекции соединен с первым выходом блока определения знака коррекции, вто15 рой вход - с вторым выходом блока определения знака коррекции, третий вход - с третьим выходом блока определения знака коррекции и информационным входом второго блока памяти, четвертый вход - с информационным выходом второго блока памяти и выходной клеммой Знак коррекции устройства, пятый вход - с выходом датчика угла поворота валков, а выход блока определения вели25 чины коррекции соединен с информационным входом первого блока памяти, вход
Запись которого соединен с четвертым выходом блока определения знака коррекции и входом Запись второго
30 блока памяти, а адресный вход с входными клеммами Номер пропуска устройства, информационный выход первого блока памяти соединен с выходными клеммами Величина коррек20
Скорость 6ы5роса 5,
Номер пропуска
запись
Знак коррекции
Фиг.1
величина коррекции
Фиг. 2
